




 本文详细介绍了ROS中的TF(TransForm)系统,包括其作为坐标变换工具的角色,以及TF树的概念。同时,讲解了TF消息类型`TransFormStamped.msg`的结构,以及在C++和Python中如何使用TF进行坐标变换。此外,还简述了URDF(Unified Robot Description Format)在定义机器人结构、用于可视化和仿真的作用。
本文详细介绍了ROS中的TF(TransForm)系统,包括其作为坐标变换工具的角色,以及TF树的概念。同时,讲解了TF消息类型`TransFormStamped.msg`的结构,以及在C++和Python中如何使用TF进行坐标变换。此外,还简述了URDF(Unified Robot Description Format)在定义机器人结构、用于可视化和仿真的作用。
TF(TransForm)
坐标变换(位置+姿态)
坐标系数据维护的工具
ROS中的tf
坐标变换的标准、话题、工具、接口
机器人是由很多部件组成的,也就是link,每个link上对应一个frame(坐标系)
TF tree维护各个坐标系之间的关系,不能有断路
TF消息
TransFormStamped.msg
header定义一个序号、时间、坐标系id
用geometry_msgs/Transform定义父坐标系和子坐标系之间的变换,用一个三维向量表示平移,一个四元数表示旋转


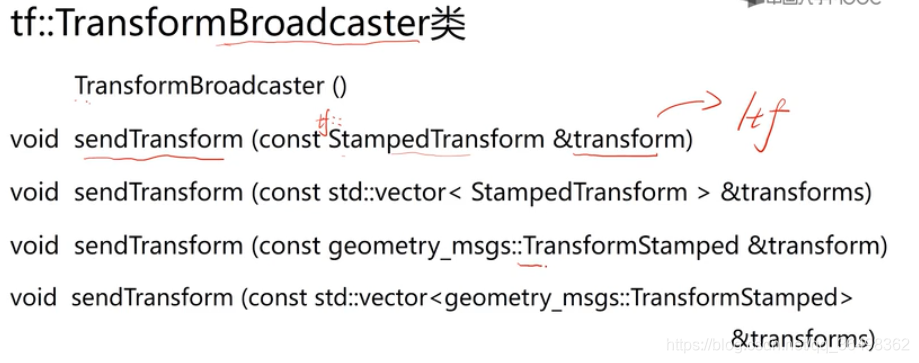
tf in c++


其实就是一个publisher
得到源坐标系到目标坐标系之间的转换关系,用**ros::Time
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4337
4337

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









