ROS学习笔记十五:service_demo(rospy)
最新推荐文章于 2024-04-27 18:17:20 发布




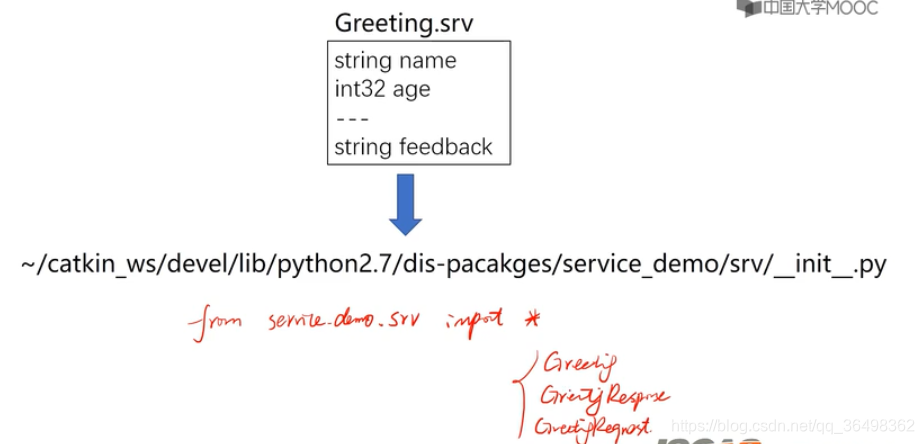
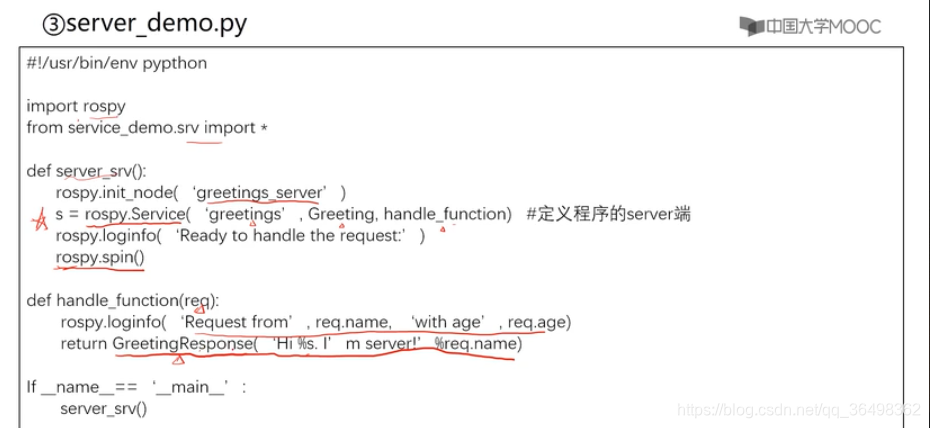
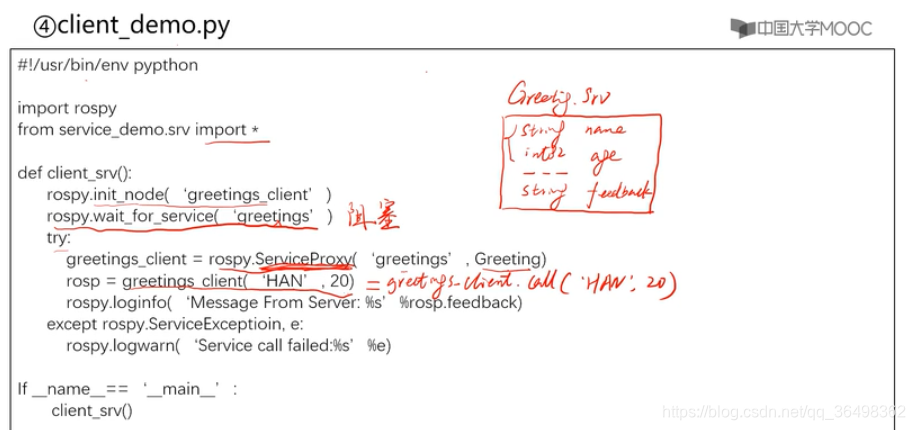
 本文介绍了一个基于ROS的Service示例,包含两个节点:一个用于发布请求,另一个用于接收并处理请求,最后返回响应。通过这个示例,读者可以了解如何在ROS中实现Service通信。
本文介绍了一个基于ROS的Service示例,包含两个节点:一个用于发布请求,另一个用于接收并处理请求,最后返回响应。通过这个示例,读者可以了解如何在ROS中实现Service通信。
本文介绍了一个基于ROS的Service示例,包含两个节点:一个用于发布请求,另一个用于接收并处理请求,最后返回响应。通过这个示例,读者可以了解如何在ROS中实现Service通信。
本文介绍了一个基于ROS的Service示例,包含两个节点:一个用于发布请求,另一个用于接收并处理请求,最后返回响应。通过这个示例,读者可以了解如何在ROS中实现Service通信。
 1022
382
370
4309
1022
382
370
4309

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言