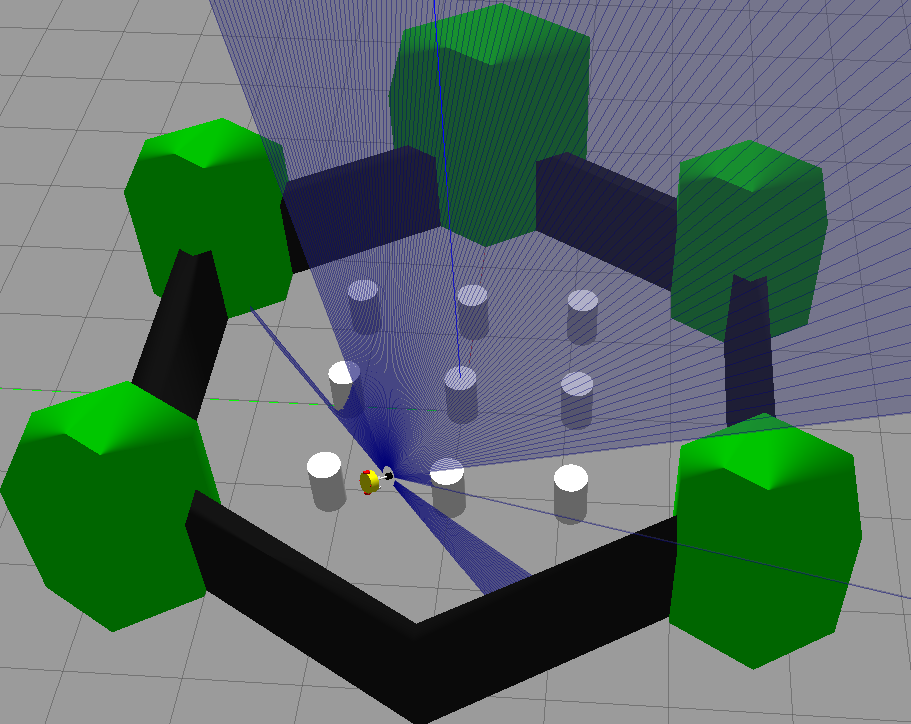
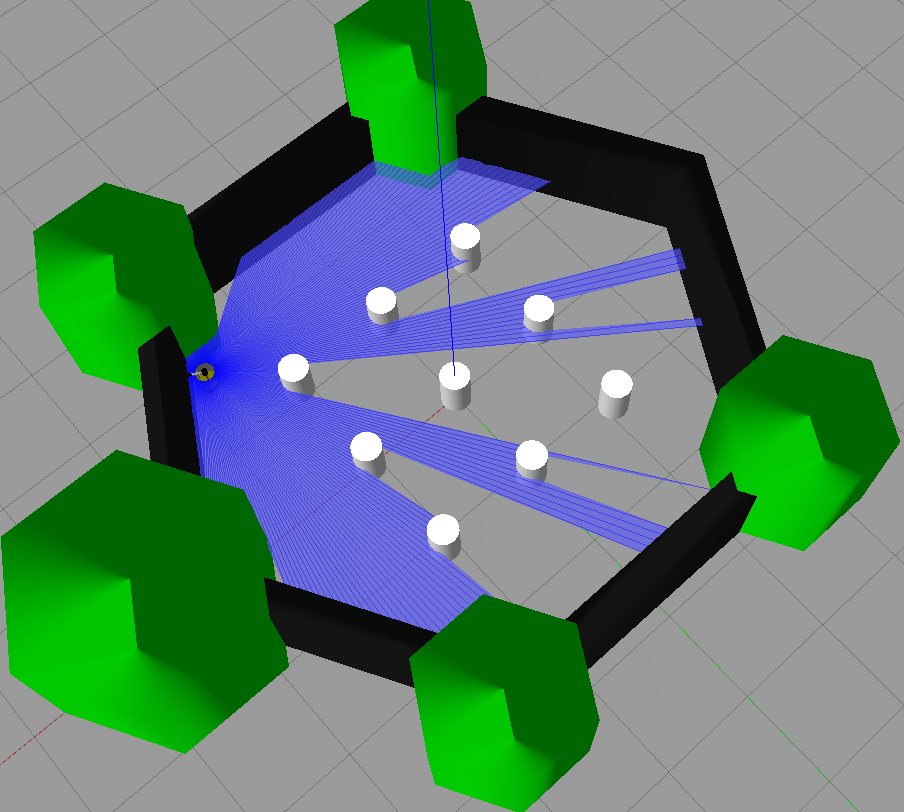
可以修改一下机器人模型的各部分的质量,有时候导入模型中的参数mass过大会导致标题中出现的问题,如果对mass无过高的要求,可以改小一点(单位为kg),即可正常显示。 我改的是机器人上方激光的质量,下图是修改之前的,机器人明显不正常! 修改之后入下图,位姿显示正常: 参考、参考


























 2955
2955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






