







视图矩阵(View Matrix)在计算机图形学中扮演着至关重要的角色,主要用于将场景中的三维物体转换到二维视图空间。它的主要作用包括以下几个方面:
1. 相机变换
视图矩阵用于描述相机在三维空间中的位置和方向。通过视图矩阵,可以将场景中的物体坐标转换为相对于相机的坐标。这意味着,视图矩阵定义了相机的“视角”,即相机观察场景的方式。
2. 坐标系统转换
视图矩阵将世界坐标系中的物体坐标转换为视图坐标系(或相机坐标系)。在视图坐标系中,相机的位置通常被视为原点,物体的位置相对于相机的位置进行调整。这使得后续的投影变换(如透视投影或正交投影)变得更加简单。
3. 实现场景的渲染
在渲染过程中,视图矩阵帮助确定哪些物体在相机的视野内,以及它们在屏幕上的位置。通过将物体的世界坐标乘以视图矩阵,可以得到物体在相机视图中的位置,从而决定如何在屏幕上绘制这些物体。
4. 处理相机运动
当相机在场景中移动或旋转时,视图矩阵会相应地更新。这使得相机的运动(如平移、旋转)能够在渲染过程中反映出来。例如,当相机向前移动时,视图矩阵会更新以反映相机的新位置。
5. 简化计算
通过使用视图矩阵,开发者可以将复杂的相机变换简化为矩阵乘法。这种方法不仅高效,而且易于实现。通过矩阵运算,可以轻松地组合多个变换(如平移、旋转、缩放),从而实现复杂的相机行为。
6. 与投影矩阵结合
视图矩阵通常与投影矩阵结合使用,以实现完整的视图变换。视图矩阵负责将物体从世界坐标系转换到视图坐标系,而投影矩阵则负责将视图坐标系中的物体转换到裁剪坐标系,最终映射到屏幕坐标系。
总结
视图矩阵的主要作用是将三维场景中的物体坐标转换为相对于相机的坐标,从而实现相机的视角和运动。它在计算机图形学中是实现场景渲染、相机控制和坐标转换的基础工具。通过视图矩阵,开发者可以有效地管理和渲染三维场景。
世界坐标中的游戏物体不进行视图转换会导致渲染结果是什么样的呢
如果在渲染过程中不对游戏物体的世界坐标进行视图转换,渲染结果将会出现以下几种情况:
1. 物体位置不正确
在没有视图转换的情况下,物体的世界坐标将直接用于渲染。这意味着物体的位置将相对于世界坐标系进行绘制,而不是相对于相机的视角。这会导致以下问题:
- 相机位置不变:如果相机在场景中移动,物体的位置不会随之更新,导致物体在屏幕上的位置看起来是固定的,无法正确反映相机的运动。
- 视角不正确:物体的显示位置将与相机的视角不一致,可能会导致物体在屏幕上看起来不在相机的视野内,或者在相机移动时物体的相对位置不发生变化。
2. 无法实现透视效果
视图转换的一个重要作用是实现透视效果,使得物体在距离相机较远时看起来较小,而在距离相机较近时看起来较大。如果不进行视图转换,所有物体将以相同的比例渲染,无法体现出深度感和空间感。
3. 物体重叠和遮挡问题
在没有视图转换的情况下,物体的渲染顺序和位置可能会导致重叠和遮挡问题。例如,远处的物体可能会被近处的物体遮挡,但由于没有视图转换,渲染引擎无法正确判断物体的深度关系,可能会导致错误的渲染结果。
4. 无法实现相机的旋转和移动
视图转换不仅仅是平移,还包括旋转。如果不进行视图转换,物体将无法根据相机的旋转进行相应的调整,导致物体在屏幕上的方向和位置不符合相机的视角。
5. 整体场景的失真
最终,所有这些问题将导致整个场景的失真,无法正确反映出游戏世界的真实状态。玩家将无法获得正确的视觉体验,影响游戏的可玩性和沉浸感。
总结
总之,如果不对世界坐标中的游戏物体进行视图转换,渲染结果将会出现位置不正确、无法实现透视效果、物体重叠和遮挡问题、无法实现相机的旋转和移动等一系列问题。这些问题会严重影响游戏的视觉效果和玩家的体验,因此视图转换是渲染过程中不可或缺的一部分。
物体的世界坐标和视图坐标系之间的区别和联系
物体的世界坐标和视图坐标系是计算机图形学中两个重要的坐标系统,它们在三维渲染过程中扮演着不同的角色。以下是它们之间的区别和联系:
区别
-
定义和含义:
- 世界坐标系(World Coordinate System):
- 世界坐标系是一个全局坐标系统,用于描述场景中所有物体的位置和方向。它是一个固定的坐标系,通常以场景的原点(0, 0, 0)为中心,所有物体的位置都是相对于这个坐标系来定义的。
- 视图坐标系(View Coordinate System):
- 视图坐标系是一个相对坐标系统,用于描述物体相对于相机的位置和方向。视图坐标系的原点通常位于相机的位置,坐标轴的方向与相机的朝向相关。视图坐标系是动态的,会随着相机的移动和旋转而变化。
- 世界坐标系(World Coordinate System):
-
坐标转换:
- 从世界坐标到视图坐标:
- 在渲染过程中,物体的世界坐标需要通过视图矩阵进行转换,以得到物体在视图坐标系中的位置。这一过程称为“视图变换”。
- 视图坐标的使用:
- 视图坐标系中的物体位置将用于后续的投影变换,以将三维场景映射到二维屏幕上。
- 从世界坐标到视图坐标:
-
用途:
- 世界坐标系:
- 用于描述场景中所有物体的绝对位置,适合进行场景的整体布局和物体之间的相对位置计算。
- 视图坐标系:
- 用于确定相机视角下的物体位置,适合进行渲染和投影计算,以便正确显示在屏幕上。
- 世界坐标系:
联系
-
转换关系:
- 世界坐标系和视图坐标系之间的关系通过视图矩阵建立。视图矩阵将物体的世界坐标转换为视图坐标,使得物体的位置能够相对于相机进行计算。
-
渲染流程中的顺序:
- 在渲染过程中,通常的顺序是先将物体的世界坐标转换为视图坐标,然后再进行投影变换,最后将结果映射到屏幕坐标系。这一流程确保了物体在相机视角下的正确显示。
-
相机运动的影响:
- 当相机在场景中移动或旋转时,视图坐标系会随之变化,而物体的世界坐标保持不变。通过视图矩阵的更新,可以动态地调整物体在视图坐标系中的位置,从而实现相机的运动效果。
总结
世界坐标系和视图坐标系是计算机图形学中两个重要的坐标系统,它们在物体的定位和渲染过程中起着不同的作用。世界坐标系用于描述物体在场景中的绝对位置,而视图坐标系则用于描述物体相对于相机的相对位置。通过视图矩阵的转换,物体的世界坐标可以被转换为视图坐标,从而实现正确的渲染效果。
当然,接下来我们可以更深入地探讨世界坐标系和视图坐标系之间的关系,以及它们在实际应用中的一些细节和注意事项。
进一步探讨
1. 相机运动的影响
相机的运动(平移和旋转)会直接影响视图坐标系的构建:
-
平移:当相机在场景中移动时,视图矩阵会更新以反映相机的新位置。物体在视图坐标系中的位置会相应变化。
-
旋转:当相机旋转时,视图矩阵也会更新,改变物体在视图坐标系中的方向。这种变化使得物体在屏幕上的显示效果与相机的朝向一致。
2. 实际应用中的注意事项
-
性能考虑:在实时渲染中,频繁更新视图矩阵可能会影响性能。通常情况下,视图矩阵只在相机位置或方向发生变化时更新。
-
坐标系的右手法则:在三维图形中,通常使用右手坐标系。确保在计算向量时遵循右手法则,以避免方向错误。
-
视图矩阵的逆:在某些情况下,可能需要使用视图矩阵的逆来将视图坐标转换回世界坐标。这在进行碰撞检测或物体选择时非常有用。
总结
世界坐标系和视图坐标系是计算机图形学中不可或缺的两个坐标系统。它们通过视图矩阵相互连接,确保物体在相机视角下的正确显示。理解这两者之间的区别和联系,以及如何进行坐标转换,对于实现高效的三维渲染和相机控制至关重要。通过合理的坐标转换和矩阵运算,可以实现真实感强烈的视觉效果,提升用户的沉浸体验。
物体的世界坐标和视图坐标系的坐标轴数值分别是多少
物体的世界坐标和视图坐标系的坐标轴数值并没有固定的数值,因为它们的具体数值取决于场景的设置、物体的位置、相机的位置和方向等因素。以下是对这两个坐标系的详细解释,以及如何理解它们的坐标轴数值。
1. 世界坐标系(World Coordinate System)
-
定义:世界坐标系是一个全局坐标系统,用于描述场景中所有物体的位置和方向。它通常是一个固定的坐标系,所有物体的位置都是相对于这个坐标系来定义的。
-
坐标轴:
- X轴:通常表示水平方向,向右为正方向。
- Y轴:通常表示垂直方向,向上为正方向。
- Z轴:通常表示深度方向,向前为正方向(在某些情况下,Z轴向后为正方向,具体取决于坐标系的定义)。
-
数值示例:
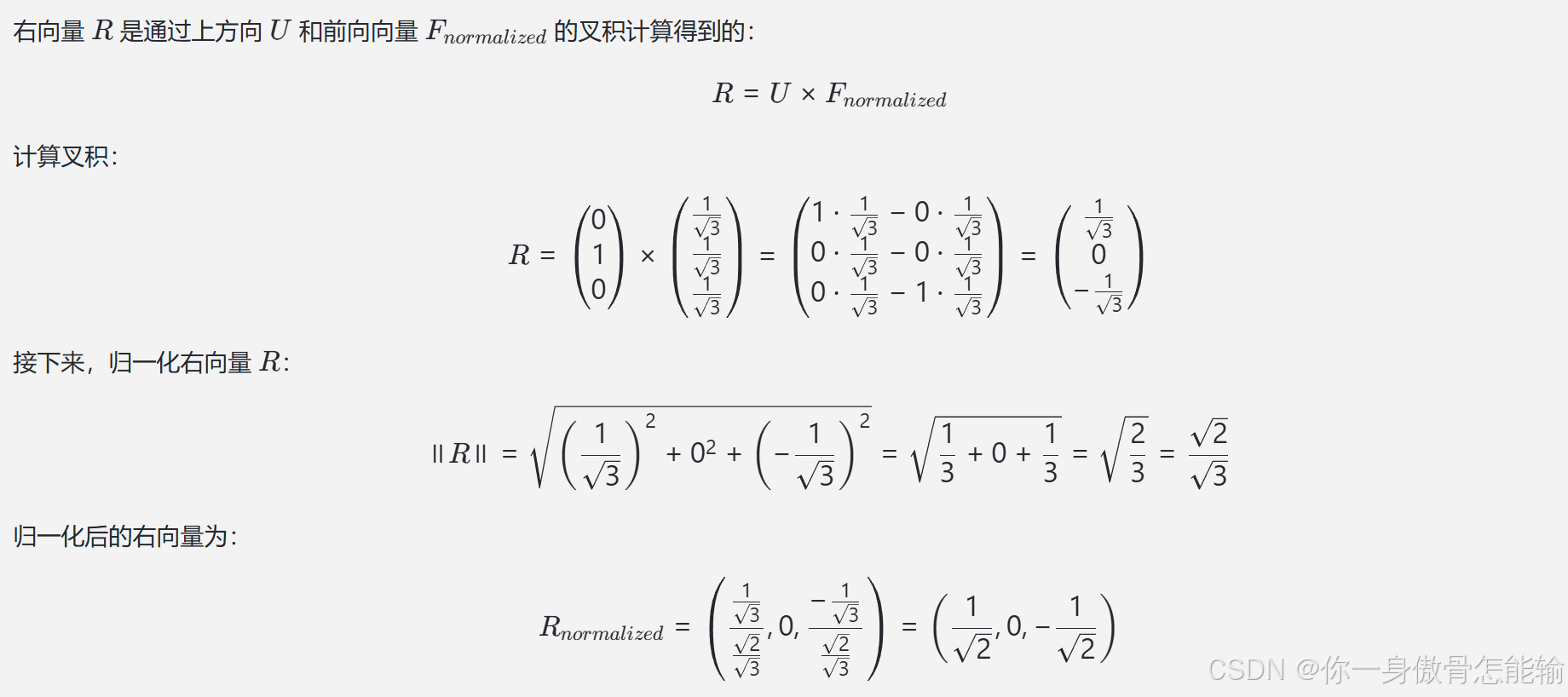
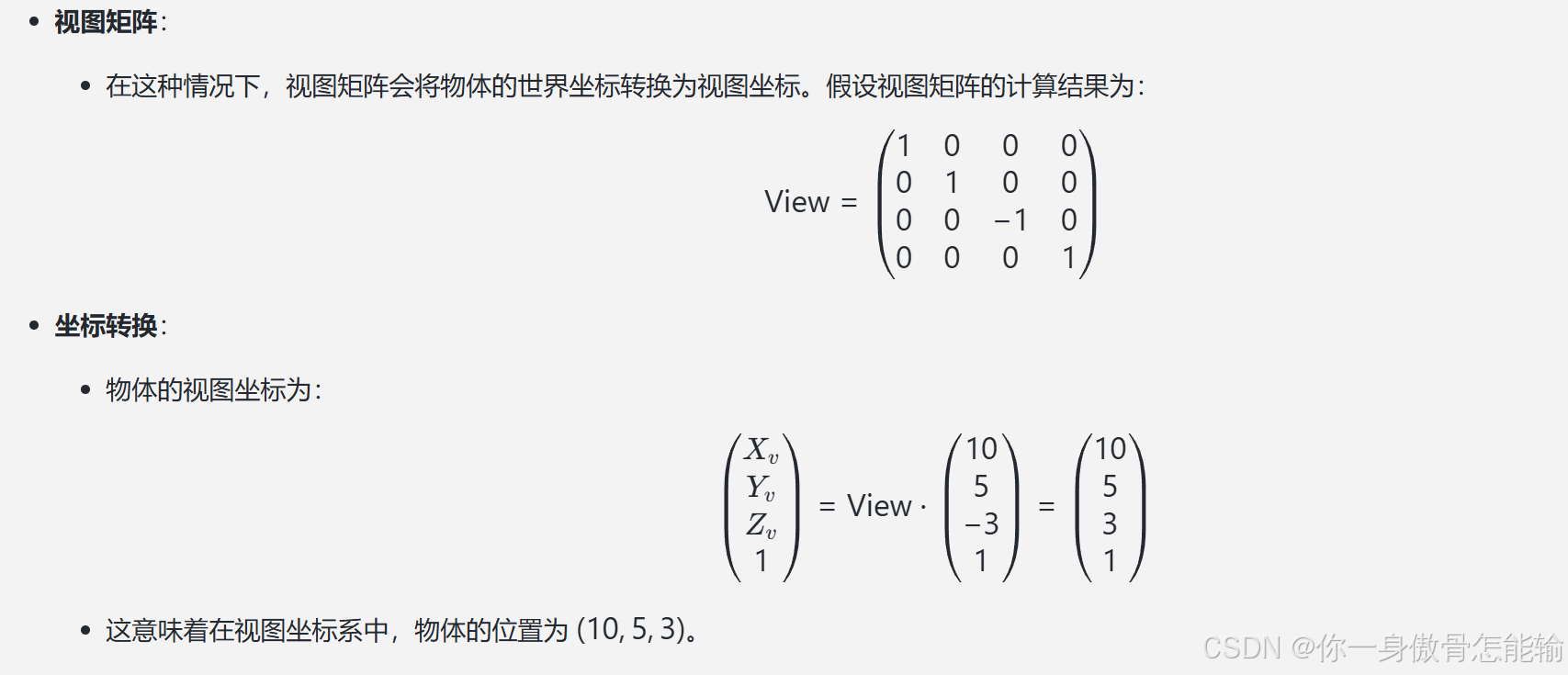
3. 坐标转换示例
为了更好地理解世界坐标和视图坐标之间的关系,以下是一个简单的坐标转换示例:
- 假设:
- 物体的世界坐标为 ((10, 5, -3))。
- 相机的位置为 ((0, 0, 0))。
- 相机朝向为 ((0, 0, -1))(即Z轴负方向)。
总结
世界坐标系和视图坐标系的坐标轴数值是动态的,取决于物体和相机的位置、方向等因素。通过坐标转换,可以将物体的世界坐标转换为视图坐标,从而实现正确的渲染效果。理解这两个坐标系的定义和转换关系对于计算机图形学中的渲染过程至关重要。
相机坐标系坐标轴数值大小
相机坐标系的坐标轴数值大小并没有固定的数值,因为它们是相对于相机的位置和方向而定义的。相机坐标系是一个局部坐标系,其原点通常位于相机的位置,坐标轴的方向与相机的朝向相关。以下是对相机坐标系的详细解释:
相机坐标系(Camera Coordinate System)
1. 坐标轴定义
- X轴:表示相机的右方向。通常,X轴的正方向是相机的右侧。
- Y轴:表示相机的上方向。通常,Y轴的正方向是相机的上方。
- Z轴:表示相机的前方向。通常,Z轴的正方向是相机的视线方向,即相机所观察的方向。
2. 坐标轴数值示例
相机坐标系的坐标轴数值大小取决于相机的位置和方向。以下是一些示例:
- 相机位置:假设相机位于世界坐标系中的位置 (C x ,C y,C z )=(0,0,0)。
- 相机朝向:假设相机朝向 Z 轴负方向(即向后),并且 X 轴和 Y 轴与世界坐标系一致。
在这种情况下,相机坐标系的坐标轴数值可以表示为:
- X轴:((1, 0, 0))(向右)
- Y轴:((0, 1, 0))(向上)
- Z轴:((0, 0, -1))(向前)
3. 坐标轴数值的变化
如果相机移动或旋转,坐标轴的数值会相应变化。例如:
-
相机平移:如果相机从 ((0, 0, 0)) 移动到 ((1, 2, 3)),相机坐标系的原点会变为 ((1, 2, 3)),但坐标轴的方向可能保持不变,具体取决于相机的朝向。
-
相机旋转:如果相机旋转了 90 度,坐标轴的方向会发生变化。例如,假设相机绕 Y 轴旋转 90 度,原来的坐标轴可能变为:
- X轴:((0, 0, -1))(向前)
- Y轴:((0, 1, 0))(向上)
- Z轴:((1, 0, 0))(向右)
4. 实际应用中的坐标轴数值
在实际应用中,坐标轴的数值大小通常是通过矩阵运算来计算的。视图矩阵的构建过程会涉及到相机的位置、目标点和上向量的计算,从而确定相机坐标系的坐标轴方向。
总结
相机坐标系的坐标轴数值大小是动态的,取决于相机的位置和方向。通过理解相机坐标系的定义和坐标轴的变化,可以更好地进行三维图形的渲染和相机控制。具体的数值会根据场景的不同而有所变化,因此没有固定的数值。
unity引擎中相机坐标系
在 Unity 引擎中,相机坐标系有一些特定的限制和特性,这些特性影响了相机的视野和渲染效果。以下是关于 Unity 中相机坐标系的一些关键点:
1. 相机的视锥体(Frustum)
Unity 中的相机使用视锥体来定义可见的区域。视锥体是一个四面体,包含了相机可以看到的所有物体。视锥体的参数包括:
- 近裁剪面(Near Clip Plane):相机能看到的最小距离。小于这个距离的物体将不会被渲染。默认值通常是 0.3 单位。
- 远裁剪面(Far Clip Plane):相机能看到的最大距离。超过这个距离的物体将不会被渲染。默认值通常是 1000 单位。
- 视野角(Field of View, FOV):相机的视野角度,影响相机的宽度和高度。对于透视相机,默认值通常是 60 度。
2. 相机坐标系的范围
-
坐标系:相机坐标系的原点通常位于相机的位置,X 轴指向右,Y 轴指向上,Z 轴指向前(相机的视线方向)。在 Unity 中,坐标系是右手坐标系。
-
坐标范围:虽然相机坐标系本身没有固定的范围,但由于近裁剪面和远裁剪面,实际可见的物体范围是有限的。物体的 Z 坐标必须在近裁剪面和远裁剪面之间才能被渲染。
3. 相机的移动和旋转
-
移动:相机可以在场景中自由移动,改变其位置和朝向。相机的位置会影响其坐标系的原点,而相机的旋转会影响坐标轴的方向。
-
旋转:相机的旋转会改变其视野,影响可见物体的排列和透视效果。相机的旋转通常通过设置其
transform.rotation属性来实现。
4. 透视与正交相机
-
透视相机:默认的相机类型,模拟人眼的视角,物体在距离相机较远时看起来较小,具有深度感。
-
正交相机:没有透视效果,物体的大小与距离无关,适用于 2D 游戏或需要精确对齐的场景。
5. 实际应用中的注意事项
- 物体的渲染:确保物体的 Z 坐标在近裁剪面和远裁剪面之间,以便它们能够被相机渲染。
- 相机设置:根据场景需求调整相机的近裁剪面、远裁剪面和视野角,以获得最佳的视觉效果。
总结
在 Unity 中,相机坐标系的范围和特性是由视锥体的近裁剪面和远裁剪面决定的。相机的移动和旋转会影响其坐标系的原点和方向,而不同类型的相机(透视和正交)会影响物体的渲染效果。理解这些特性对于在 Unity 中创建有效的场景和视觉效果至关重要。



















 2618
2618

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











