







 超级会员免费看
超级会员免费看
 本文详细介绍了AUTOSAR架构下CAN唤醒的硬件选择和软件分析,包括三种硬件唤醒方式,如RH850与TJA1042、TJA1043的组合。软件层面,通过EcuM模块管理唤醒源,EcuM_CheckWakeup和EcuM_CheckValidation进行唤醒源检查和验证。此外,讨论了Can Transceiver和Can Controller的中断与查询唤醒时序图。
本文详细介绍了AUTOSAR架构下CAN唤醒的硬件选择和软件分析,包括三种硬件唤醒方式,如RH850与TJA1042、TJA1043的组合。软件层面,通过EcuM模块管理唤醒源,EcuM_CheckWakeup和EcuM_CheckValidation进行唤醒源检查和验证。此外,讨论了Can Transceiver和Can Controller的中断与查询唤醒时序图。
唤醒源配置和管理
在AUTOSAR架构中唤醒源由EcuM模块管理,唤醒源在EcuM中配置,唤醒源的检测可以配置Polling和Interrupt两种方式,每一个唤醒源都要配置唯一的唤醒源ID,并且可以配置CheckWakeupTimeout和ValidationTimeout两个超时时间,这两个时间用来设置唤醒源检查和唤醒的最大时间。另外每一个唤醒源可以映射一个ComM管理的通道,在唤醒后可以请求ComM打开某一个通道的通信。
CAN唤醒硬件方式选择
CAN唤醒的方式和选择的Can Transceiver、ECU低功耗的处理方式(深度睡眠或掉电)等考虑因素有关,常用的硬件组合及唤醒方式如下
方式一
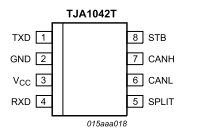
RH850 + TJA1042
睡眠前,使能RH850与TJA1042 RXD所连接的CAN Rx脚唤醒功能,同时复用GPIO中断,并且操作TJA1042的PIN脚,使其处于StandBy模式。
睡眠后,当TJA1042从CAN BUS收到CAN报文后,会通过RXD引起CAN Rx脚电平翻转,从而唤醒MCU
唤醒后,需要检查是否收到合法唤醒报文,否则会继续睡眠
方式二
RH850 + TJA1043
使用TJA1

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2754
2754

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











