







这里参考SLAM实操入门(六):连接Velodyne的16线激光雷达并可视化_velodyn 16线-优快云博客
将该博客内容摘录在这里以作备份,并加以我的一些标注,感谢原博主的贡献!
后续我将在别的博客中更新更多的使用过程。
1、硬件连接
注:多线雷达和单线雷达硬件上的差异
(1)多线雷达需要使用220v的插座来进行供电,如果要部署在机器人或者汽车上,可能需要使用户外电源、车载逆变器或对供电进行改造;
(2)多线雷达需要通过以太网进行数据的传输,所以要求设备有网口,也需要对网口进行设置;
(3)多了一个接口盒硬件,用来做电源管理和数据采集,正常连线就好,不用过多关注。
实际连接:
两条线分别连接电源和网口即可:
一个是供电接口,插头插在220v电源;
另一个是信号线,插网线,连接在PC的网口。
2、配置网络
上面提到该雷达是通过以太网进行数据传输的,这里需要对有线网的地址进行设置
首先打开设置,选择网络,打开有线连接并进入设置,如图

随后进行如下步骤
- 点击IPv4
- 将IPv4的方式调整为手动
- 修改地址为:192.168.1.77
- 修改子网掩码为,网关不用动:255.255.255.0
- 点击应用,退出

注:这里可以进入浏览器,在网址处输入VLP-16的默认地址: http://192.168.1.201,配置VLP-16,有相关的一些设置参数,不设置其实也没事:
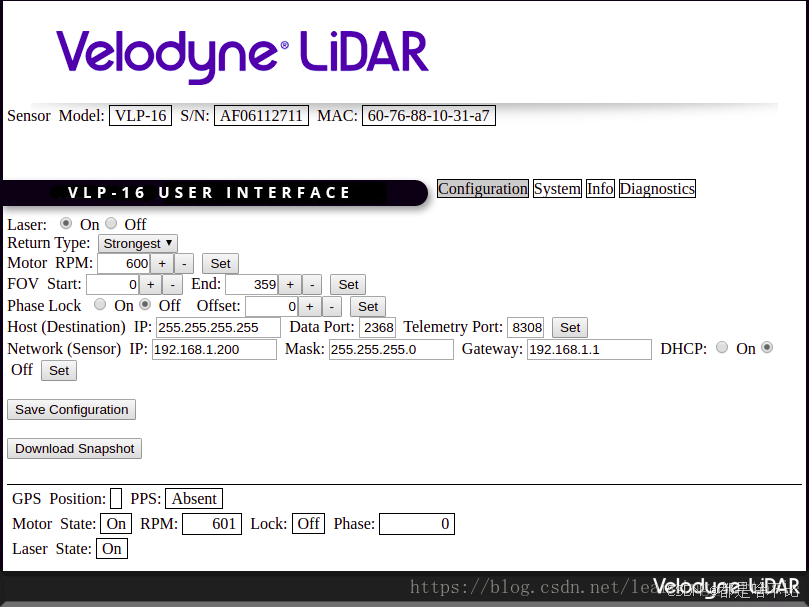
这里可参考博客: Velodyne VLP-16数据显示与录制_velodyne 数据显示-优快云博客
原博主的备注:
在多传感器开发时,为了避免IP地址冲突,可能会更改IP地址,也就是在这个界面中修改。
但是,一定要记住更改后的IP地址。
比较坑的是,我这台设备的IP地址被改成了192.168.1.200,而且我事先不知道改成了什么。
这时,可以使用 WireShark网络分析软件获取设备的IP地址。
3、创建ROS工程
使用如下命令安装Velodyne的依赖包,相关内容见产品手册
注:这里根据ROS的版本不同修改noetic这个值,我这里是20.04所以是noetic
sudo apt-get install ros-noetic-velodyne
随后,创建ROS的项目文件:
mkdir -p velodyne_ws/src进入项目文件目录下
cd velodyne_ws/src拉取雷达的驱动包,这里使用的是GitHub上的这个项目文件
git clone https://github.com/ros-drivers/velodyne.git等待完成,要是下载太慢或者失败,可以看看之前的这个文章
返回上级目录,catkin_make对工程进行编译。
之后即可使用。
4、启动并可视化
再次检查:
- 激光雷达是否连接正常(供电、网线)
- 上述命令,以及相关依赖包是否安装成果
- source不要忘记!
(1)在刚才安装velodyne库的目录/velodyne_ws下,source后,运行:
roslaunch velodyne_pointcloud VLP16_points.launch
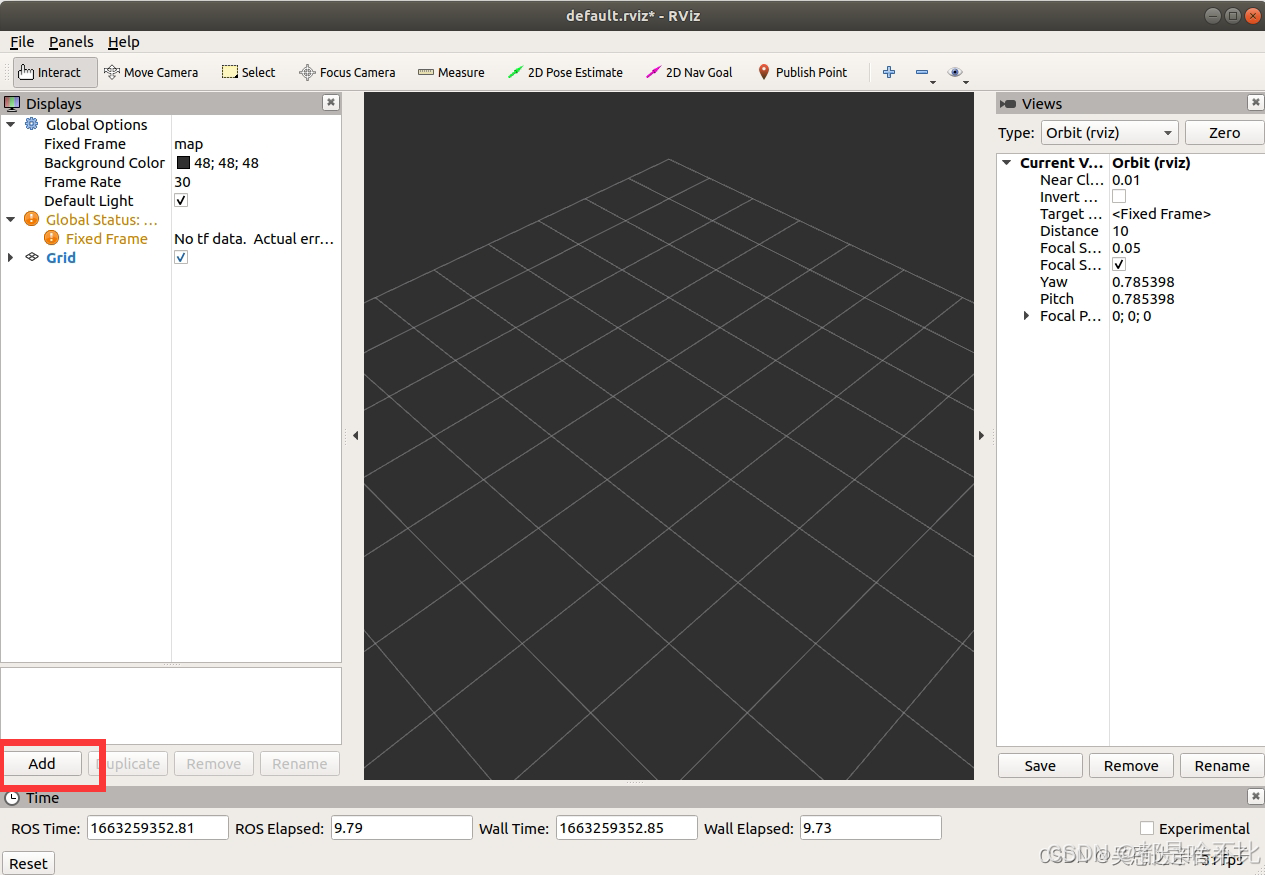
(2)可视化:另起终端,打开rviz,然后:
a.先点击左侧的Add,添加可视化的条目
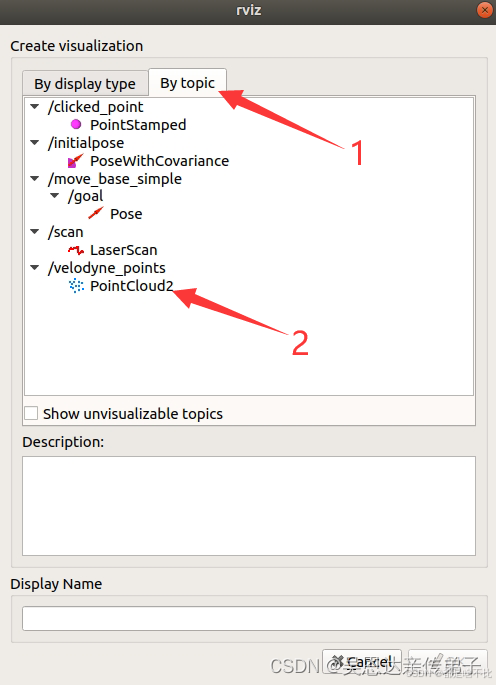
b. 随后,点击By topic,双击PointCloud2以选择添加点云信息
c. 在添加的点云中选择topic,右侧选择输出的信息节点
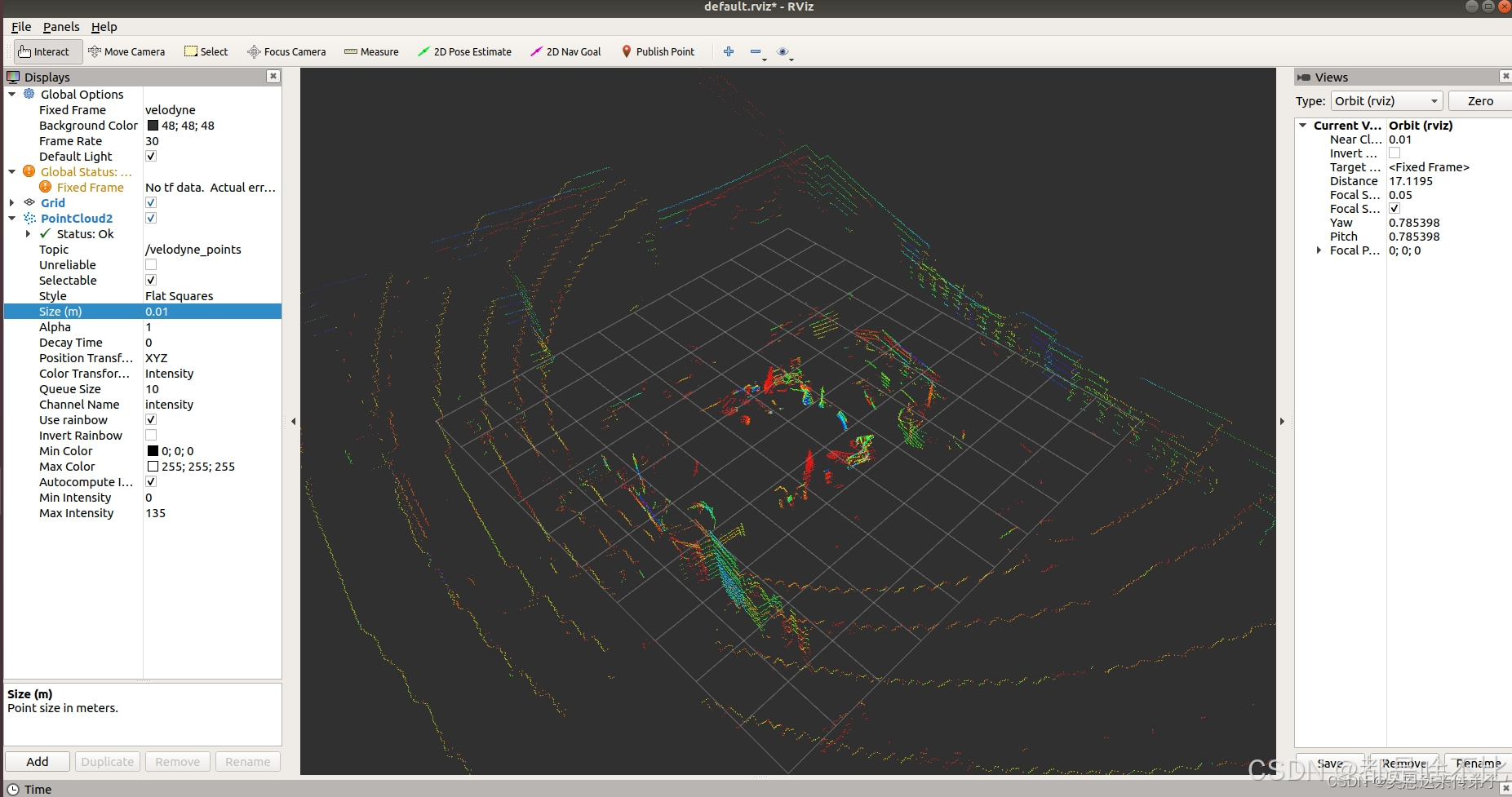
d. 将Fixed Frame的名称替换velodyne
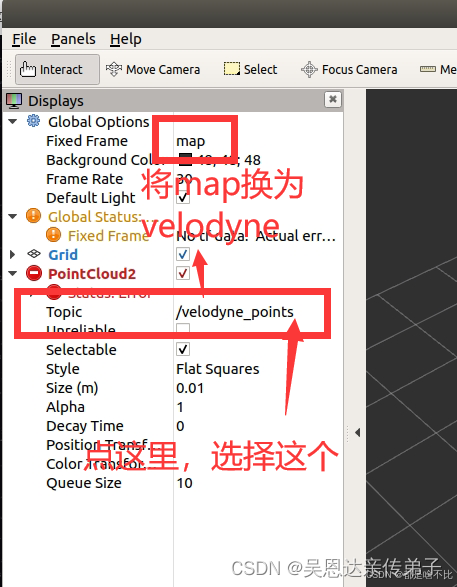
即可看到最后可视化结果:
5、录包与播放
使用以下命令可以进行点云数据的录制
1、仅录制/velodyne_point的数据(这个就包含了lidar扫描的点云的所有信息,velodyne这里提供的是XYZIRT的信息) :
rosbag record /velodyne_point
2、录制所有数据
rosbag record -a
之后就可以使用录制的包了。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









