







一、原理和流程
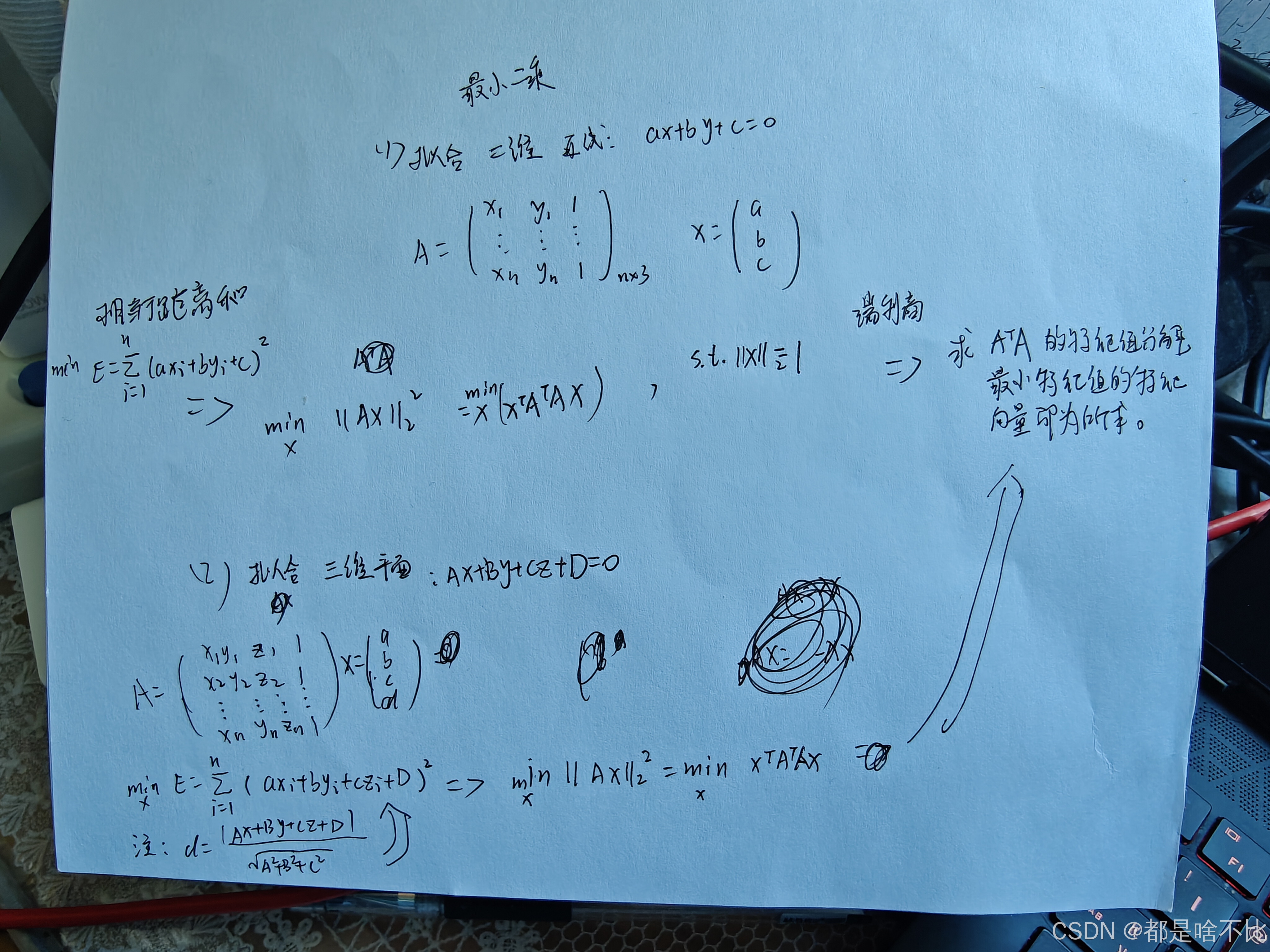
1、最小二乘法拟合二维直线和三维平面的原理:
2、ransac方法的基本流程:
①选一个模型来表达目标拟合,确定需要确定参数的最小点数minnum_point得到模型
②求其他所有点到这个模型的距离,距离小于阈值Th的被视为内点
③选择内点数最多的那个模型参数即为所求
④这里就迭代N次(次数N可用公式计算或直接设个较大的值),记录下最多的内点数和对应的模型参数。
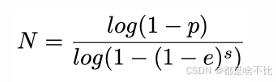
e:外点的比例估计;p:迭代N次至少有一次都是内点的好采样;s:在以此采样中需要的点数(比如直线拟合需要2个点)
可以根据那个概率公式来推N:![]()
则N:
⑤可选:进一步优化方法:求出来后,再对该模型的内点用最小二乘法拟合一下,更精确
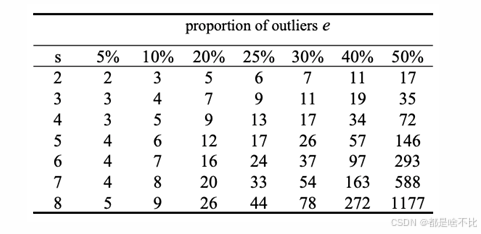
注:下表可以用于参考:对于p=0.99时,N大概能计算得:
可以看出对于二维和三维得直线和平面拟合,外点占比估计在50%及以下时,基本直接设置迭代N=100次就能拟合出最后结果了。
二、代码
//二维点拟合直线、三维点拟合平面(应该就可以做地平面)
#include<iostream>
#include<algorithm>
#include<vector>
#include<math.h>
#include<stdlib.h>
#include<fstream>
#include<Eigen\Dense>
using namespace std;
//pi是输入点云,result存模型的结果参数
//这里直线选择:Ax+By+1=0来拟合
//流程:①选一个模型来表达目标拟合,确定需要确定参数的最小点数minnum_point得到模型
//②求其他所有点到这个模型的距离,距离小于阈值Th的被视为内点
// ③选择内点数最多的那个模型参数即为所求
//④这里就迭代N次(次数N用公式计算),记录下最多的内点数和对应的模型参数。
//e:外点的比例估计;p:迭代N次至少有一次都是内点的好采样;s:在以此采样中需要的点数(比如直线拟合需要2个点)
//可以根据那个概率公式来推N
//⑤可选:进一步优化方法:求出来后,再对该模型的内点用最小二乘法拟合一下,更精确
vector<double> ransac_line2d(vector<Eigen::Vector2d>& pi)
{
int s = 2;
float e = 0.5;//点云中外点比例估计
float p = 0.99;//迭代中保证0.99的概率至少出一次全内点的模型
int N = int(log(1 - p) / log(1 - pow((1 - e), s))) + 1;
//cout << "N: " <<N<< endl;
float th = 0.5;//距离阈值,小于认为是内点
int inliernummax = INT_MIN;
vector<double> para(2);
for (int i = 0; i < N; i++)
{
//选一个模型来表达目标拟合,确定需要确定参数的最小点数minnum_point得到模型
//随机选s个点
// 解方程得到模型参数
//求其他所有点到这个模型的距离,距离小于阈值Th的被视为内点
int ida = rand() % (pi.size());
int idb = ida;
while (idb == ida)
idb = rand() % (pi.size());
Eigen::Vector2d pia(pi[ida]);
Eigen::Vector2d pib(pi[idb]);
//Eigen::Matrix<double, 2, 2> A{ pia.transpose() ,pib.transpose() };//这样不行
Eigen::Matrix<double, 2, 2> A{ {pia(0), pia(1)} ,
{pib(0), pib(1)} };
//cout << pia << endl;
//cout << pib << endl;
//cout <<"A: " << A << endl;
Eigen::Vector2d b{ -1, -1 };
Eigen::Vector2d x = A.colPivHouseholderQr().solve(b);//求解出直线的参数{A,B}
int inliernum = 0;
//遍历所有其他点,求点到直线的距离
for (int j = 0; j < pi.size(); j++)
{
if (j == ida || j == idb)
continue;
double dis = abs(x(0) * pi[j](0) + x(1) * pi[j](1) + 1) / sqrt(x(0) * x(0) + x(1) * x(1));
if (dis < th)
{
inliernum++;
}
}
if (inliernum > inliernummax)
{
inliernummax = inliernum;
para[0] = x(0);
para[1] = x(1);
}
//cout << "内点数:"<< inliernum << endl;
//这里就迭代N次(次数N用公式计算),记录下最多的内点数和对应的模型参数。
//e:外点的比例估计;p:迭代N次至少有一次都是内点的好采样;s:在以此采样中需要的点数(比如直线拟合需要2个点)
//可以根据那个概率公式来推N
}
// 选择内点数最多的那个模型参数即为所求
return para;
//进一步优化方法:求出来后,再对该模型的内点用最小二乘法拟合一下,更精确
}
//ransac拟合三维平面
vector<double> ransac_plane3d(vector<Eigen::Vector3d>& pi)
{
float e = 0.5;
int s = 3;
float p = 0.99;
int N = log(1 - p) / log(1 - pow(1 - e, s))+1;
float th = 0.1;
int inliernum_max = INT_MIN;
vector<double> para(3);
//cout << "迭代次数N: " << N<<endl;
for (int i = 0; i < N; i++)
{
//随机产生3个点
int idxa = rand() % pi.size();
int idxb = idxa;
int idxc = idxa;
while(idxb ==idxa)
idxb = rand() % pi.size();
while (idxc == idxa || idxc == idxb)
idxc = rand() % pi.size();
//得到平面方程
Eigen::Matrix<double, 3, 3> A{ {pi[idxa](0), pi[idxa](1), pi[idxa](2)},
{pi[idxb](0), pi[idxb](1), pi[idxb](2)},
{pi[idxc](0), pi[idxc](1), pi[idxc](2)} };
Eigen::Vector3d b(-1, -1, -1);
Eigen::Vector3d x = A.colPivHouseholderQr().solve(b);
int inliernum = 0;
//计算距离和内点数
for (int j = 0; j < pi.size(); j++)
{
if (j == idxa || j == idxb || j == idxc)
continue;
double dis = abs(x(0) * pi[j](0) + x(1) * pi[j](1) + x(2) * pi[j](2) + 1) / sqrt(x(0) * x(0) + x(1) * x(1) + x(2) * x(2));
if (dis <= th)
inliernum++;
}
if (inliernum > inliernum_max)
{
inliernum_max = inliernum;
para[0] = x(0);
para[1] = x(1);
para[2] = x(2);
}
}
return para;
}
//最小二乘拟合二维直线(得都是内点)
vector<double> least_square_fitting2d(vector<Eigen::Vector2d>& pi)
{
Eigen::Matrix<double, Eigen::Dynamic, Eigen::Dynamic> A(pi.size(), 3);
for (int i = 0; i < pi.size(); i++)
{
A(i, 0) = pi[i](0);
A(i, 1) = pi[i](1);
A(i, 2) = 1;
}
Eigen::Matrix<double, 3, 3> ATA = A.transpose() * A;
Eigen::SelfAdjointEigenSolver<Eigen::Matrix<double, 3, 3>> es;
es.compute(ATA);
//返回最小特征值对应的特征向量
Eigen::Vector3d v = es.eigenvectors().col(0);
v = v / v(2);//归一化一下
vector<double> para(3);
para[0] = v(0);
para[1] = v(1);
para[2] = v(2);
return para;
}
//最小二乘拟合三维平面(得都是内点)
vector<double> least_square_fitting3d(vector<Eigen::Vector3d>& pi)
{
Eigen::Matrix<double, Eigen::Dynamic, Eigen::Dynamic> A(pi.size(), 4);
for (int i = 0; i < pi.size(); i++)
{
A(i, 0) = pi[i](0);
A(i, 1) = pi[i](1);
A(i, 2) = pi[i](2);
A(i, 3) = 1;
}
Eigen::Matrix<double, 4, 4> ATA = A.transpose() * A;
Eigen::SelfAdjointEigenSolver<Eigen::Matrix<double, 4, 4>> es;
es.compute(ATA);
//取出最小特征值对应的特征向量即为所求
Eigen::Vector4d v = es.eigenvectors().col(0);
v = v / v(3);//把D归一化为0
vector<double> para(4);
para[0] = v(0);
para[1] = v(1);
para[2] = v(2);
para[3] = v(3);
return para;
}
int main()
{
/*
* 从文件读入点云
//读入点,存入。
string path = "D:\\3xand2_50per.txt";
ifstream point_input;
point_input.open(path);
Eigen::Vector2d point;
vector<Eigen::Vector2d> pi;
while (point_input >> point(0) >> point(1))
pi.push_back(point);
*/
//1、ransac拟合二维直线
Eigen::Vector2d point;
vector<Eigen::Vector2d> pi;
//随机产生点云 100个点,50个点完全满足方程,50个点是噪声 y=3x+2即1.5x-0.5y+1=0
for (int i = 0; i < 100; i++)
{
double x = rand() % 1000;
double y;
if (i % 2 == 0)
y = 3 * x + 2 + rand() % 100;
else
y = 3 * x + 2;
point(0) = x;
point(1) = y;
pi.push_back(point);
}
//cout <<"点数:" << pi.size() << endl;
//ransac拟合二维直线,输入点云,输出直线参数 代求参数:ax+by+1=0
vector<double> result1_line = ransac_line2d(pi);
cout<<"ransac拟合平面二维直线结果:" << "A: " << result1_line[0] << " B: " << result1_line[1] << endl;
//2、ransac拟合三维平面
//随机产生平面点3x+2y+4z+1=0;
vector<Eigen::Vector3d> pi_plane;
for (int i = 0; i < 100; i++)
{
Eigen::Vector3d point_p;
point_p(0) = rand() % 1000;
point_p(1) = rand() % 1000;
if(i%2==0)
point_p(2) = (-3*point_p(0) - 2* point_p(1) -1)/4+rand()%2/10;//这里也加范围0-0.1的噪声
else
point_p(2) = (-3 * point_p(0) - 2 * point_p(1) - 1) / 4 + rand()%100;
pi_plane.push_back(point_p);
}
//ransac拟合三维平面 代求参数ax+by+cz+1=0
vector<double> result2_plane = ransac_plane3d(pi_plane);
cout << "平面拟合结果:" << result2_plane[0] << " " << result2_plane[1] << " " << result2_plane[2] << endl;
//3、最小二乘拟合二维直线(得都是内点)
//随机产生2d直线的点
//随机产生点云 100个点,100个点基本在满足方程周围,没有太离谱的噪声点 y=3x+2即1.5x-0.5y+1=0
vector<Eigen::Vector2d> pi_lsf_line;
Eigen::Vector2d point_lsf_line;
for (int i = 0; i < 100; i++)
{
double x = rand() % 1000;
double y;
y = 3 * x + 2 + rand()%100/100;//包含0-0.99的噪声
point_lsf_line(0) = x;
point_lsf_line(1) = y;
pi_lsf_line.push_back(point_lsf_line);
}
//最小二乘拟合二维直线
vector<double> result3_lsf_line = least_square_fitting2d(pi_lsf_line);
cout << "最小二乘法拟合平面二维直线结果:" << "a: " << result3_lsf_line[0] << " b: " << result3_lsf_line[1]<<"c: "<< result3_lsf_line[2] << endl;
//4、最小二乘拟合三维平面(得都是内点)
//随机产生3d平面的点3x+2y+4z+1=0;
vector<Eigen::Vector3d> pi_plane_lsf;
for (int i = 0; i < 100; i++)
{
Eigen::Vector3d point_p_lsf;
point_p_lsf(0) = rand() % 1000;
point_p_lsf(1) = rand() % 1000;
point_p_lsf(2) = (-3 * point_p_lsf(0) - 2 * point_p_lsf(1) - 1) / 4 + rand() % 100 / 100;//这里也加范围0-0.99的噪声
pi_plane_lsf.push_back(point_p_lsf);
}
//最小二乘拟合三维平面
vector<double> result4_lsf_plane = least_square_fitting3d(pi_plane_lsf);
cout << "最小二乘平面拟合结果:A: " << result4_lsf_plane[0] << " B: " << result4_lsf_plane[1] << " C: " << result4_lsf_plane[2]<<" D: " << result4_lsf_plane[3] << " " << endl;
}
输出结果:


















 2559
2559

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









