



6个电池均衡,buckboost电路,精度高,均衡速度快
在电池管理系统(BMS)中,电池均衡技术是确保电池组性能和寿命的关键环节。今天咱就来唠唠 6 个电池均衡且基于 Buck - Boost 电路实现高精度、快速均衡的那些事儿。
Buck - Boost 电路原理小窥
Buck - Boost 电路是一种既能实现降压又能实现升压功能的DC - DC 变换器。简单来说,它通过控制开关管的导通和关断时间,来调整输出电压。咱先看一段简单的代码示意(这里以 C 语言伪代码为例,用于模拟控制开关管):
// 定义开关管控制信号变量
int switch_control_signal;
// 模拟控制开关管导通
void turn_on_switch() {
switch_control_signal = 1;
}
// 模拟控制开关管关断
void turn_off_switch() {
switch_control_signal = 0;
}在实际电路里,开关管的导通与关断时间(占空比)决定了输出电压的大小。比如,当开关管导通时间长,电感存储的能量多,输出电压就可能升高(升压模式);反之,导通时间短,输出电压降低(降压模式)。这就好比你给一个容器注水,注水时间长,容器里的水就多,对应的电压也就高。
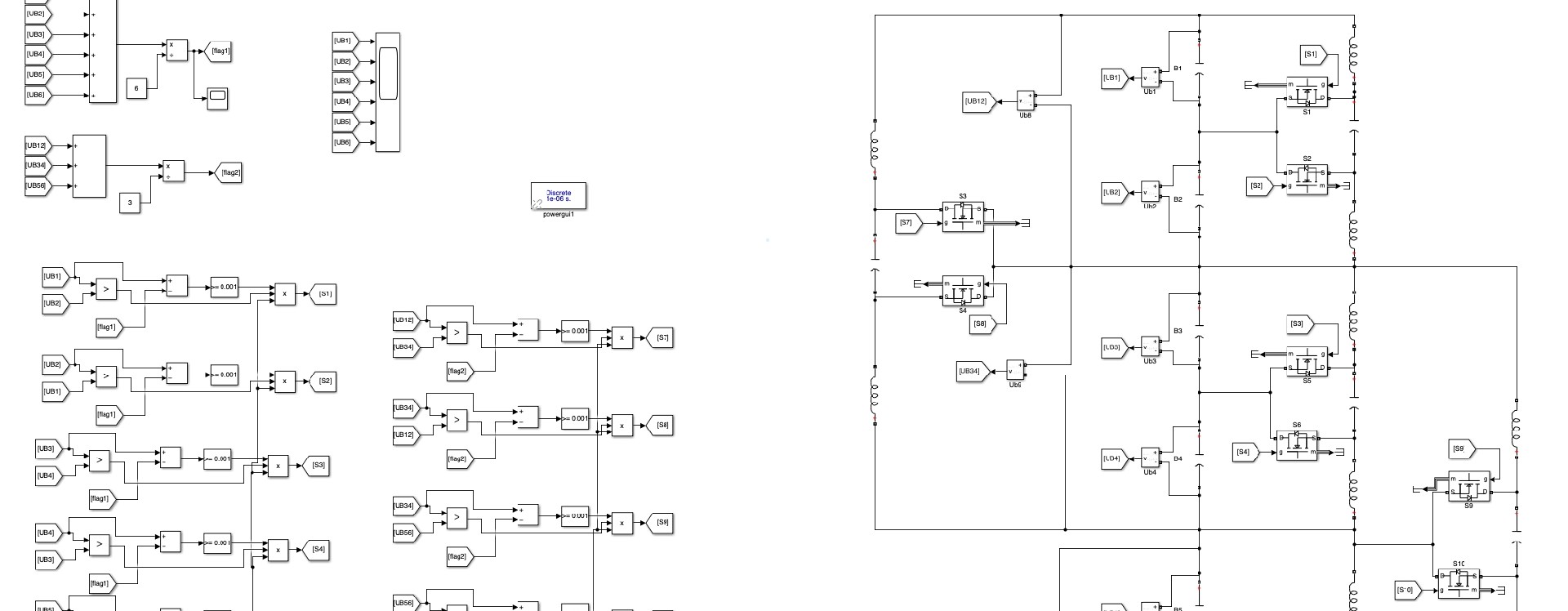
6 个电池均衡中的应用
在 6 个电池串联的电池组里,由于电池个体差异,各电池电压会逐渐出现不一致的情况。这时候,Buck - Boost 电路就像一个智能管家,对每个电池进行电压调整。
假设我们有 6 个电池,编号为 0 - 5,用数组来表示电池电压:
float battery_voltage[6];
// 初始化电池电压
void initialize_battery_voltage() {
for (int i = 0; i < 6; i++) {
// 这里简单假设初始电压值,实际可能从硬件读取
battery_voltage[i] = 3.7 + (float)rand() / RAND_MAX * 0.2;
}
}上述代码随机给每个电池设置了一个初始电压值,模拟实际中电池初始电压的微小差异。
为了实现均衡,我们要监测每个电池的电压,当某个电池电压高于或低于平均电压时,Buck - Boost 电路就开始工作。比如,下面这段代码模拟判断并调整电池 3 的电压:
// 计算电池组平均电压
float calculate_average_voltage() {
float sum = 0;
for (int i = 0; i < 6; i++) {
sum += battery_voltage[i];
}
return sum / 6;
}
// 调整电池 3 的电压
void balance_battery_3() {
float average_voltage = calculate_average_voltage();
if (battery_voltage[3] > average_voltage) {
// 这里启动 Buck - Boost 电路降压模式,将多余能量转移到其他电池
// 实际电路中需要更复杂的控制逻辑来实现能量转移
// 这里简单示意启动降压模式
start_buck_mode();
} else if (battery_voltage[3] < average_voltage) {
// 启动 Buck - Boost 电路升压模式,从其他电池获取能量
start_boost_mode();
}
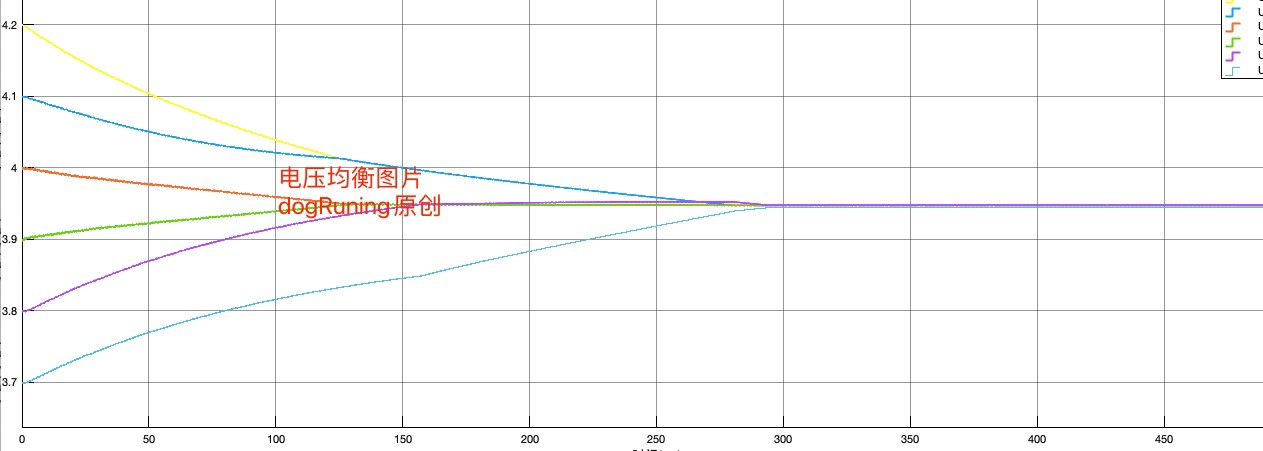
}高精度与快速均衡的实现
高精度方面,Buck - Boost 电路可以通过精确控制占空比来实现对电池电压的精准调整。在代码里,我们可以通过更精确的算法来计算占空比,而不是简单的模拟。比如采用 PID 控制算法,它能根据电池电压与目标电压的偏差,不断调整占空比。
// PID 控制参数
float Kp = 0.5, Ki = 0.1, Kd = 0.2;
float integral = 0, last_error = 0;
// PID 控制函数,用于计算占空比
float pid_control(float setpoint, float process_variable) {
float error = setpoint - process_variable;
integral += error;
float derivative = error - last_error;
float output = Kp * error + Ki * integral + Kd * derivative;
last_error = error;
// 限制占空比在合理范围 0 - 1
if (output > 1) output = 1;
if (output < 0) output = 0;
return output;
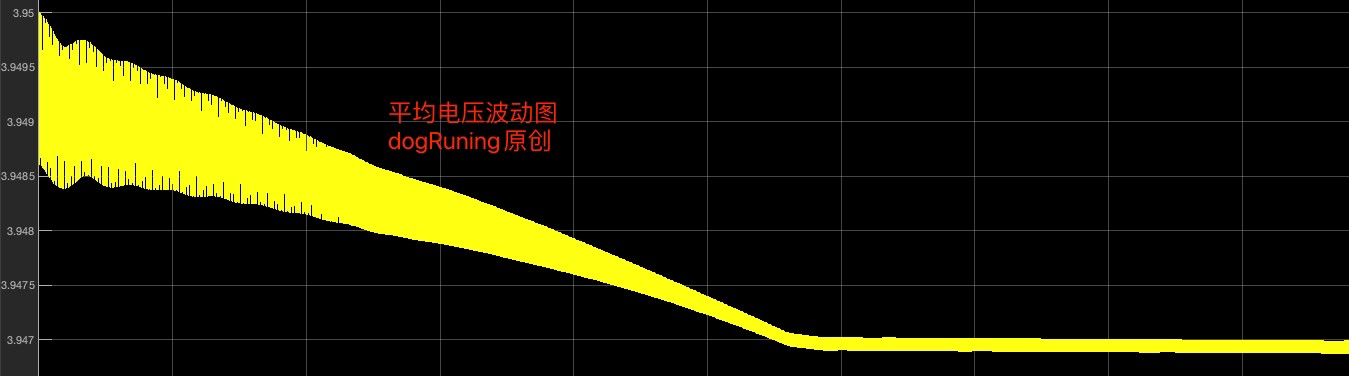
}快速均衡则依赖于高效的电路设计和控制算法。一方面,选择高速开关管和合适的电感电容参数,能加快能量的转移速度。另一方面,优化的控制算法能快速响应电池电压的变化。像上述 PID 算法,如果参数调得合适,就能快速让电池电压趋向平均电压,实现快速均衡。
总之,6 个电池均衡搭配 Buck - Boost 电路,通过巧妙的电路设计和代码算法控制,实现高精度、快速均衡,为电池组的稳定运行和寿命延长保驾护航。希望今天的分享能让大家对这个有趣的技术有更深入的了解!

















 1064
1064

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









