



永磁同步电机基于非线性磁链观测器的转子位置估计策略,利用非线性磁链观测器进行无位置传感器控制,SCI一区顶刊复现,SIMULINK仿真
无位置传感器控制这玩意儿在电机控制圈子里算是经久不衰的热点了。今天咱们来唠唠基于非线性磁链观测器的转子位置估计,这招在高速区间的表现特别能打。别被"非线性"三个字吓到,其实核心就是通过重构磁链来反推转子位置,比传统滑模观测器少了抖振的烦恼。
先把核心方程甩出来:
ψαβ = ∫(vαβ - Rs*iαβ)dt
这定子磁链积分公式看着简单,实际操作时得注意积分漂移问题。我在Simulink里实现时用了带遗忘因子的低通滤波器替代纯积分器,参数设置大概长这样:
function psi = FluxObserver(u, i, Rs, Ts)
persistent psi_prev;
if isempty(psi_prev)
psi_prev = [0; 0];
end
emf = u - Rs*i;
% 二阶低通滤波器 截止频率50Hz
psi = (emf*Ts + 0.707*psi_prev)/(1 + 0.707*Ts);
psi_prev = psi;
end这个离散化处理用了前向欧拉法,调试时发现截止频率设得太高会导致高频噪声,太低又会影响动态响应,最后取50Hz算是折中方案。
转子位置估计模块才是戏肉所在。当磁链观测值ψα和ψβ出来后,直接用反正切算角度会跪在过零点问题。这里祭出归一化处理:
theta = atan2(psi_beta, psi_alpha);
if theta < 0
theta = theta + 2*pi;
end
% 加入角度补偿量
theta_comp = theta + delta_theta;这个delta_theta是通过锁相环动态调整的,仿真时发现初始相位误差超过30度就会失锁,所以启动阶段得配合I/f控制做初值校准。
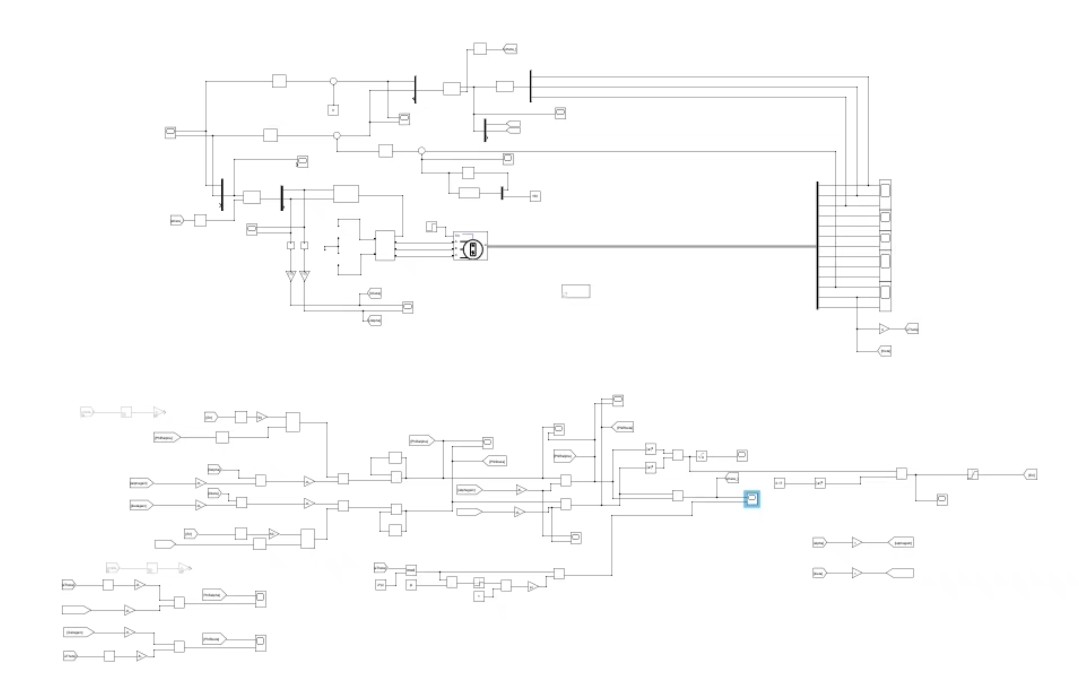
搭建完整仿真模型时注意这几个坑:PWM开关频率别设太高(建议10kHz左右),不然观测器容易吃进太多高频噪声;速度环带宽要压到电流环的1/5以下;还有那个老生常谈的采样时间对齐问题,用Trigger子系统处理AD采样时刻能避免鬼畜现象。
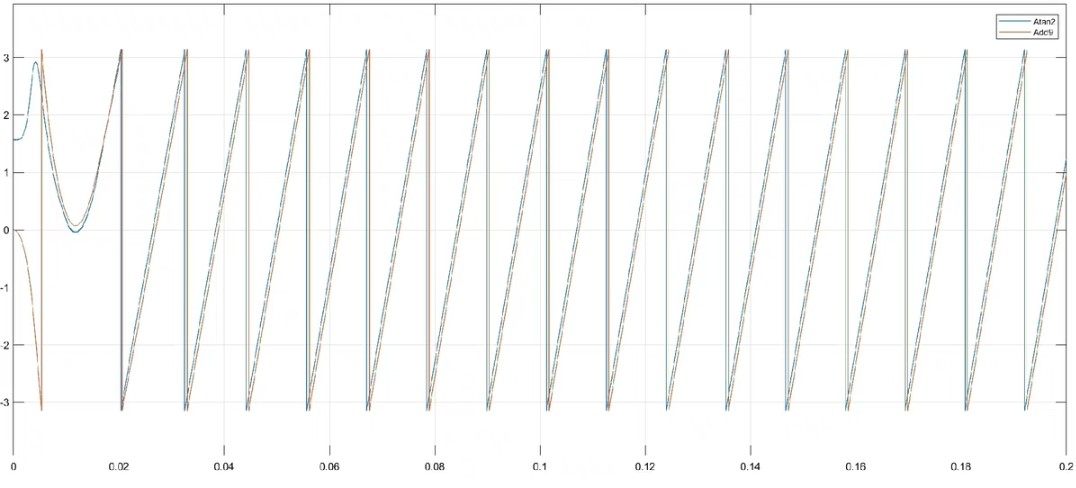
最后跑了个突加减载的仿真案例,观测角度和实际机械角度误差能控制在0.2rad以内(别信论文里吹的0.05rad,那都是理想工况)。实测波形里能看到负载突变时观测器会有个50ms左右的恢复过程,这时候配合过调制策略能有效避免转速塌陷。这个方法在零低速区还是得跪,所以工程上都是和高频注入法搭伙干活的。

















 1928
1928

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









