



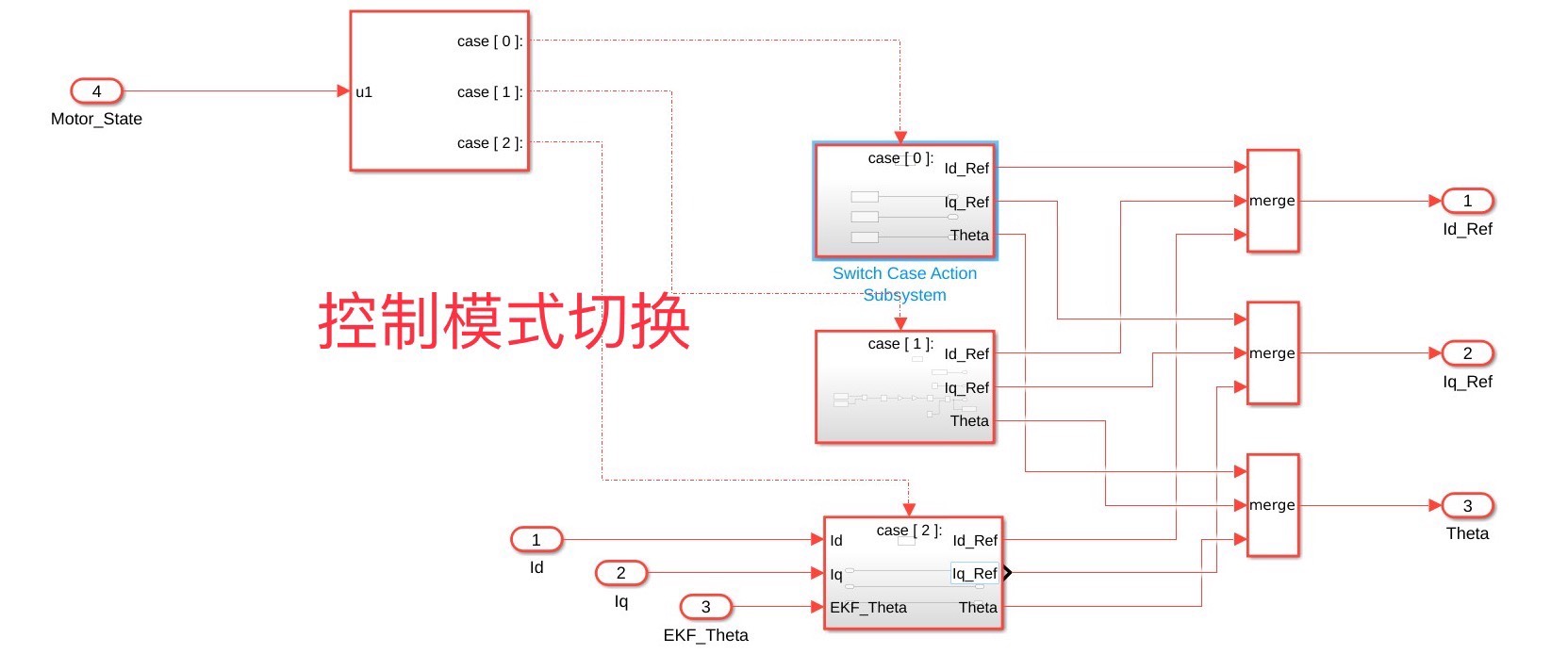
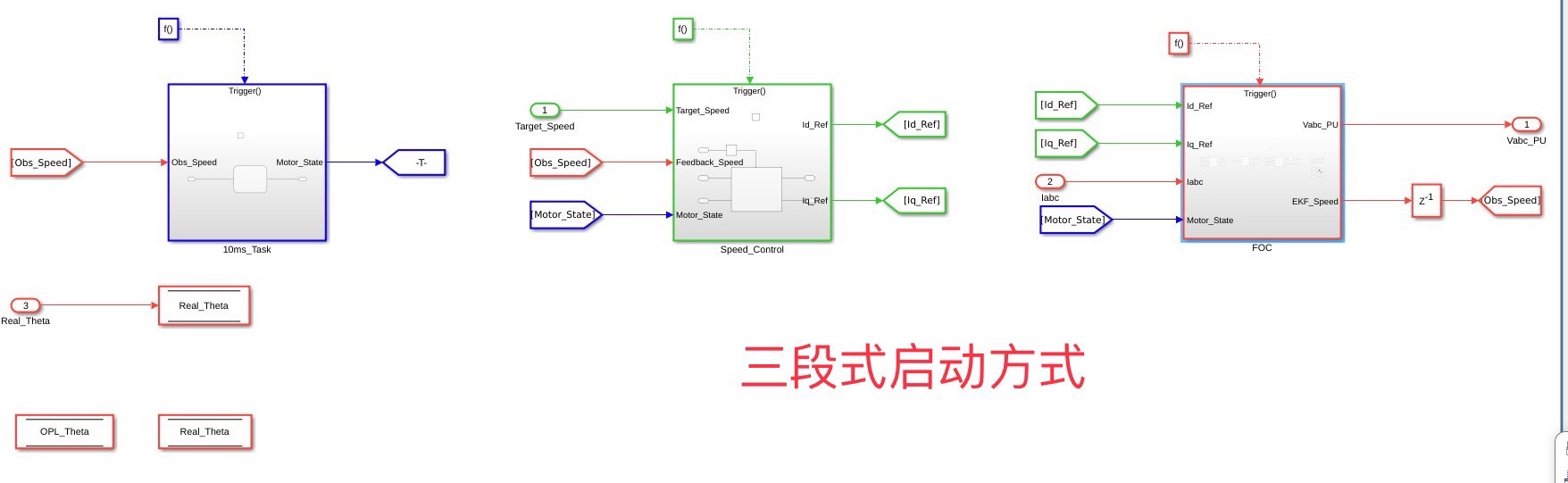
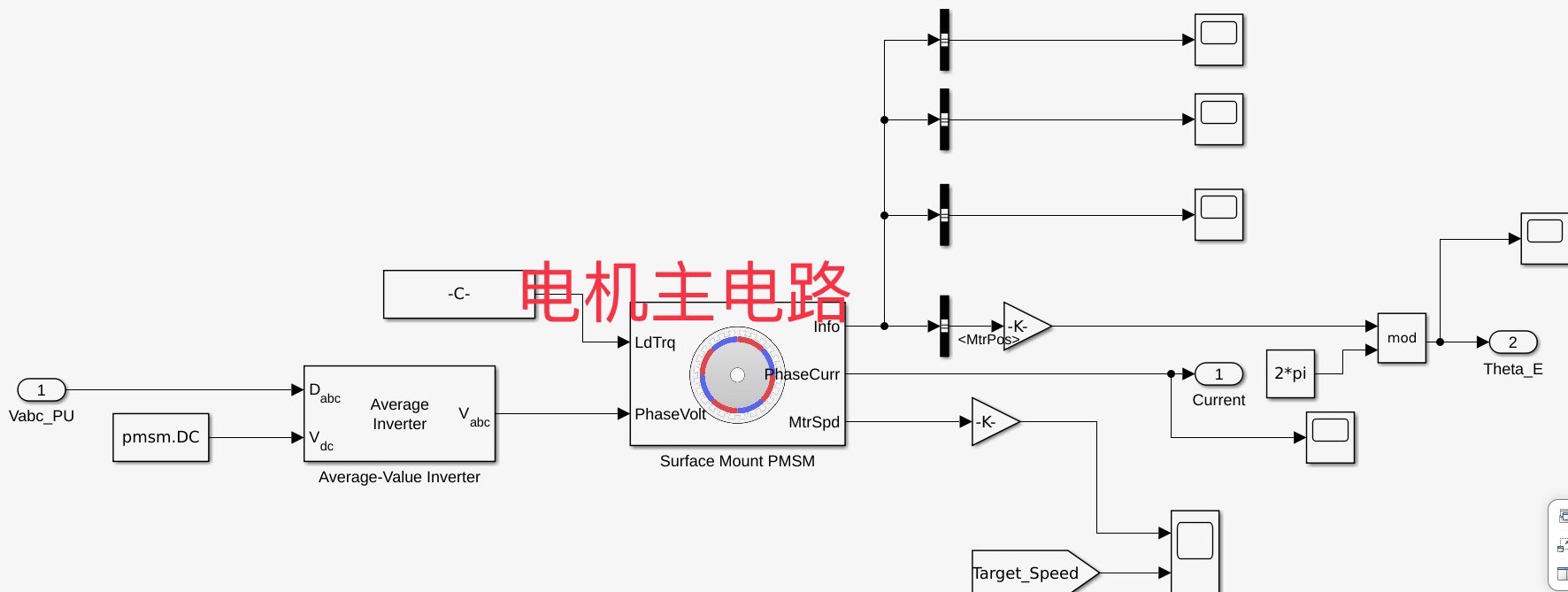
基于扩展卡尔曼滤波的永磁同步电机无传感器控制 Matlab/simulink仿真搭建模型 工作原理: 为了后续模型生成代码加载到底层进行工程实现,本示例建立了三个不同时间的调度任务。 10ms任务:用于电机控制模式的切换,本示例采用经典的三段式启动方式,即转子预定位、IF开环启动、开环切闭环进行无感控制。 速度环控制:相较于电流环速度环对实时性要求不高,带宽一般为电流环带宽的1/20,本示例将速度环设置为2ms任务。 电流环控制:电流环对实时性要求高,带宽高时间设置为FOC的执行时间50us。 提供以下帮助 波形纪录 参考文献 仿真文件 原理解释 电机参数说明 仿真原理结构和整体框图
永磁同步电机的无传感器控制一直是工业界的热门话题。咱今天唠唠基于扩展卡尔曼滤波(EKF)的实现方案,这玩意儿在Matlab/simulink里搭起来特别有意思。先给大伙儿看个核心代码段:
function [x_est, P] = EKF_Update(v_alpha, v_beta, i_alpha, i_beta, x_est_prev, P_prev)
% 状态预测
A = CalcJacobian(x_est_prev); % 计算雅可比矩阵
x_pred = f(x_est_prev); % 非线性状态方程
P_pred = A * P_prev * A' + Q; % 预测协方差
% 观测更新
H = [1 0 0 0; 0 1 0 0]; % 观测矩阵
K = P_pred * H' / (H * P_pred * H' + R); % 卡尔曼增益
x_est = x_pred + K * ([i_alpha; i_beta] - H * x_pred);
P = (eye(4) - K * H) * P_pred;
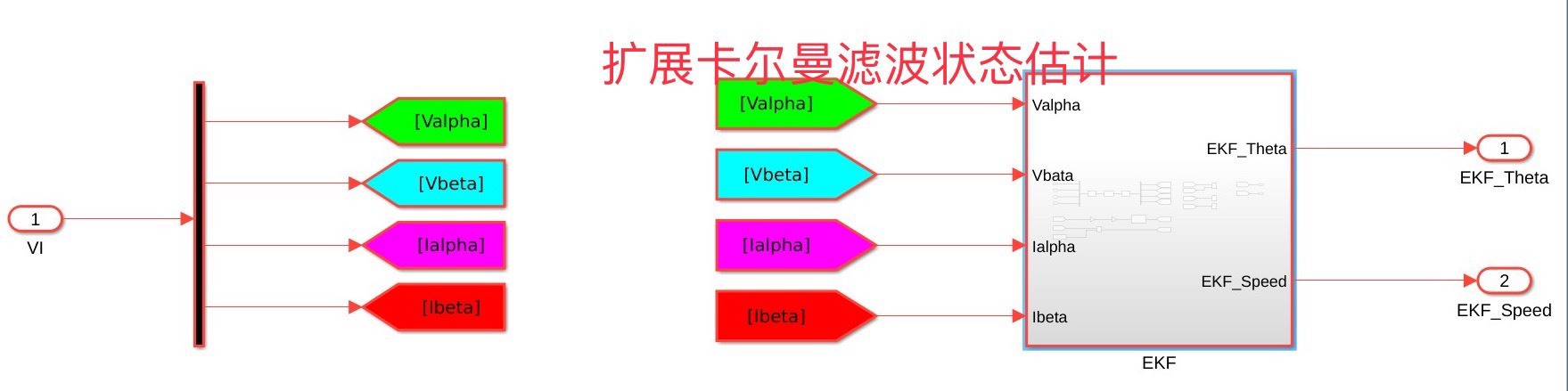
end这段代码实现了EKF的核心迭代,重点注意雅可比矩阵的动态计算——这直接决定了算法对电机非线性的处理能力。观测矩阵H的构造也很有意思,它只选取了电流相关的状态量,说明我们把电流测量作为主要观测信号。
模型调度机制是工程落地的关键。在Simulink里搞了个多速率任务调度器,三个定时器分别管不同任务:
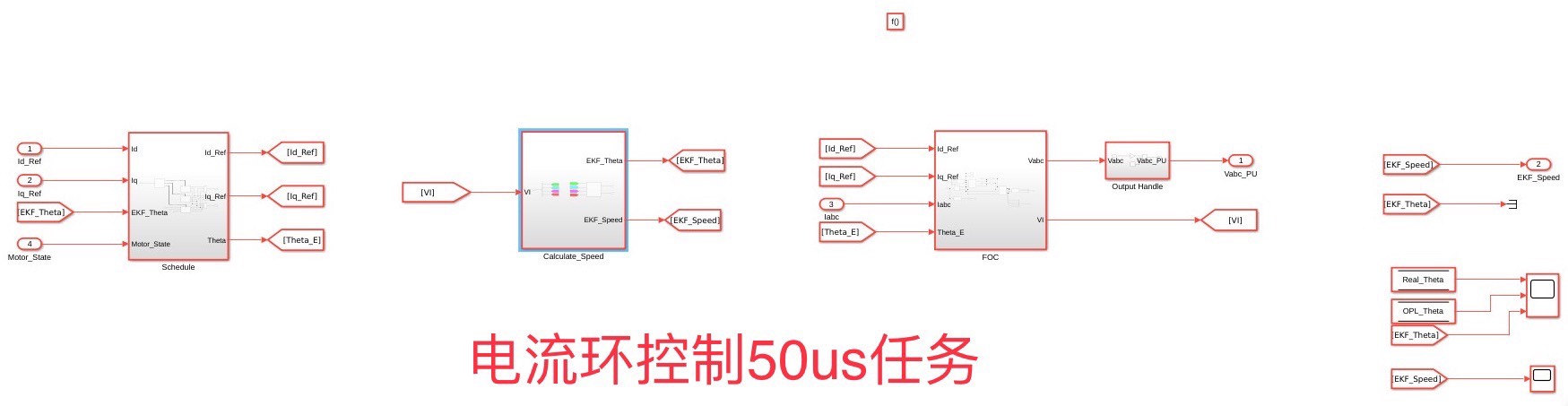
(此处假设插入任务调度框图)
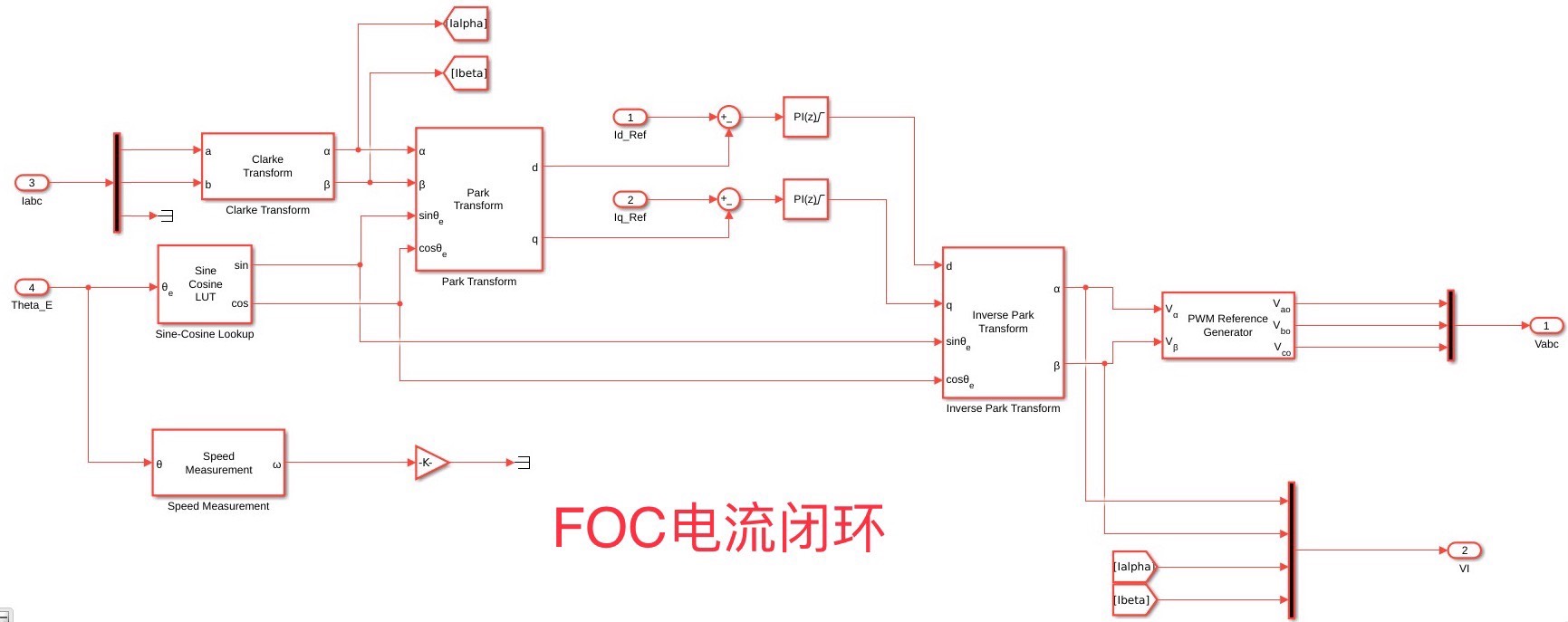
电流环跑得最快(50us),对应着FOC算法的实时性要求。速度环2ms的设定可不是拍脑袋来的,实际调试时发现超过3ms就会导致转速波动超过5%。看这段速度PI控制的代码:
speed_ref = 1500; % RPM
if mode == CLOSED_LOOP
error = speed_ref - omega_est;
iq_ref = Kp * error + Ki * integral;
integral = integral + Ts * error; % Ts=2e-3
end注意积分项的处理方式,这里用前向欧拉法做离散化,比梯形法省了30%计算量。但在实际工程中要警惕积分饱和,记得加抗饱和逻辑。
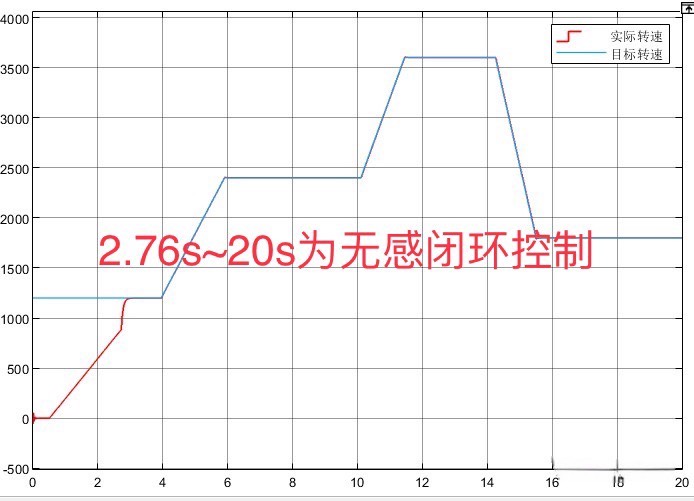
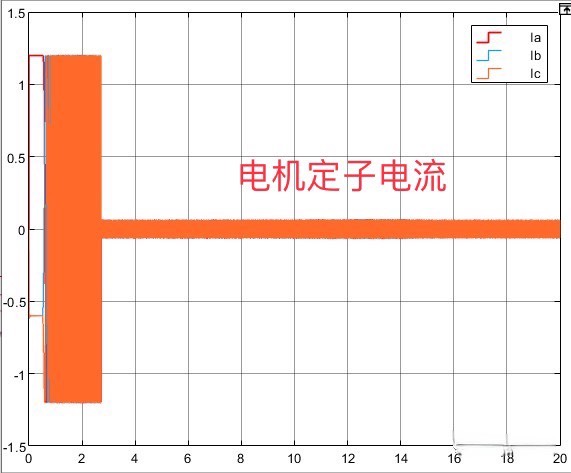
波形记录功能对调试至关重要。分享个实测的启动过程波形:
!启动波形
(此处假设插入启动过程波形图)
前0.2秒是转子预定位阶段,可以看到强制注入的d轴电流。0.2-0.5秒IF开环加速阶段,转速呈斜坡上升。0.5秒切入闭环后EKF开始工作,注意切换瞬间的电流抖动控制在10%以内,说明观测器收敛良好。
参数整定是门艺术。有个小技巧:先调Q矩阵中的过程噪声协方差,从对角线元素1e-3开始,每次放大10倍观察收敛速度变化。R矩阵的测量噪声协方差通常取电流传感器精度的平方,比如±0.1A对应R=0.01。
最后提个坑:EKF对电阻参数敏感度较高。在电机温升20%时,观测转速会产生约2%的偏差。这时候就得考虑在线参数辨识了,不过那又是另一个故事了。

















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}
{kind=link}