



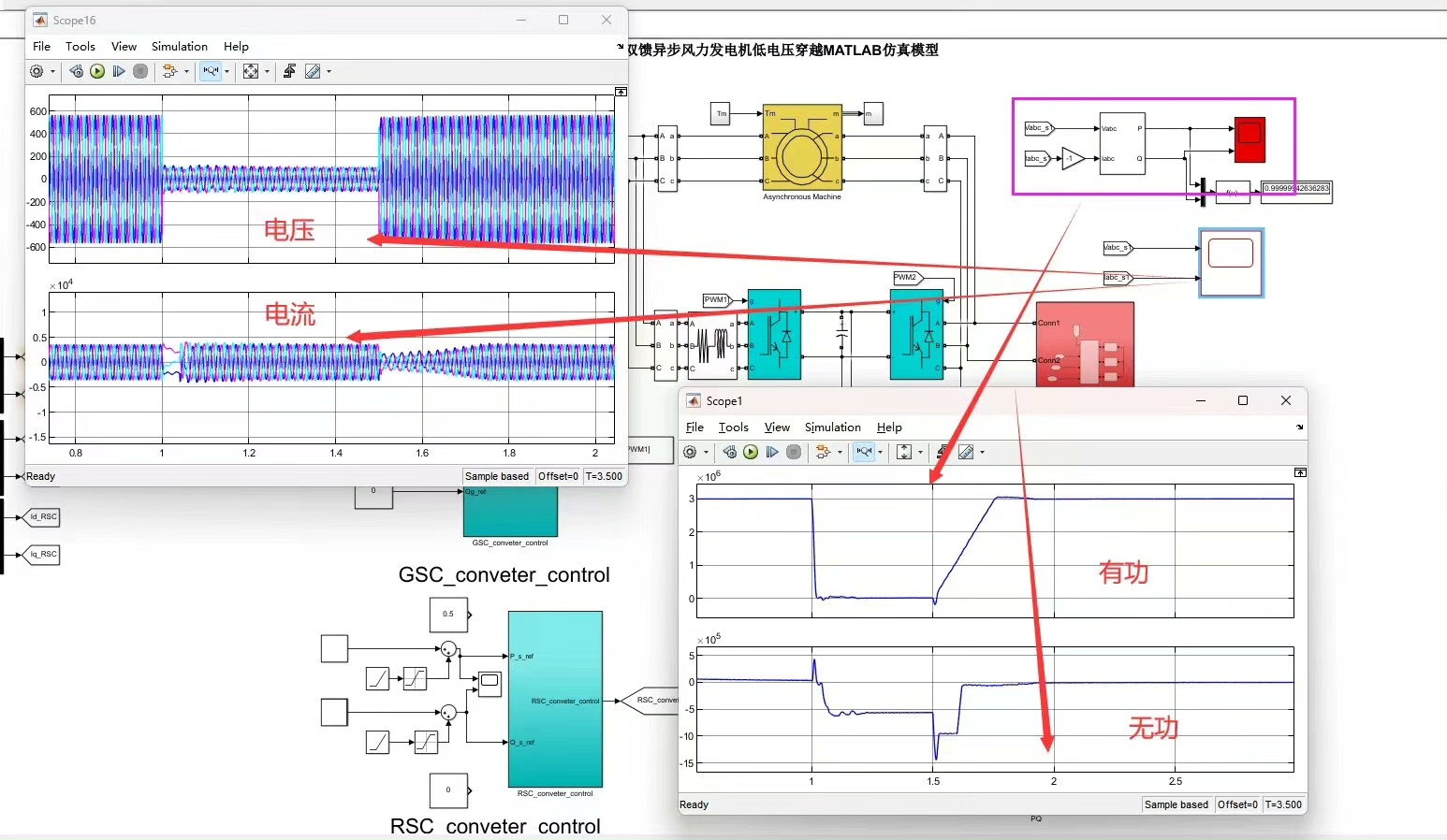
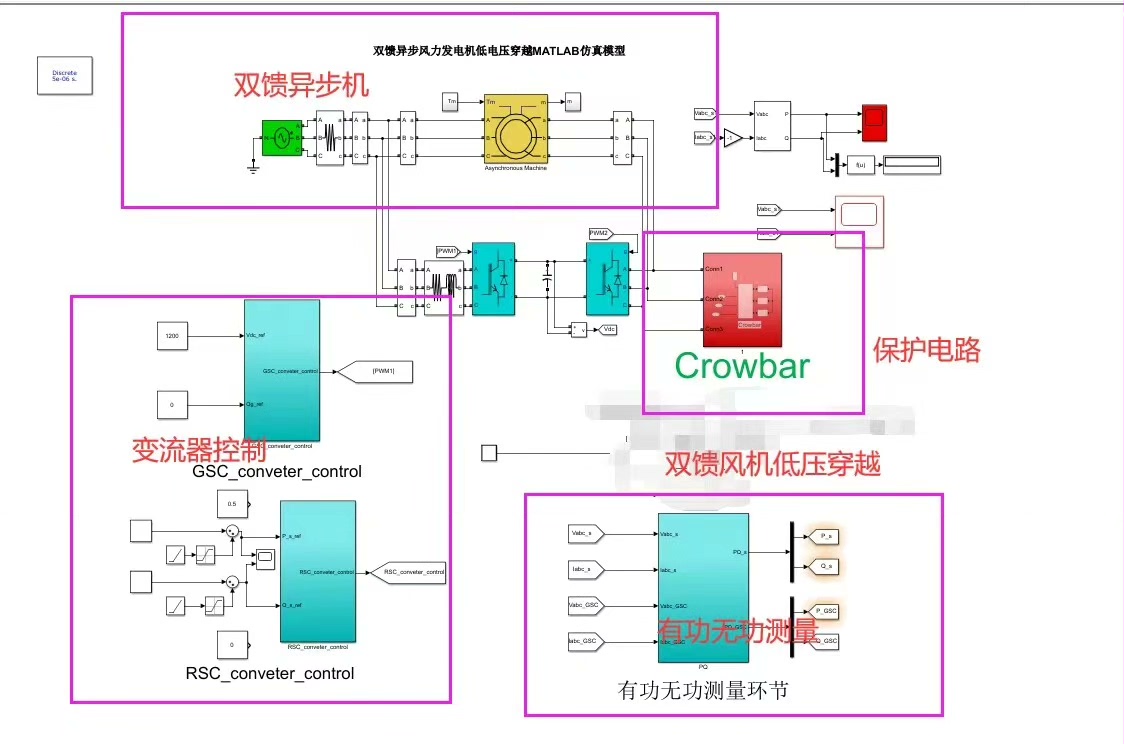
双馈风机 DFIG 低电压穿越 MATLAB仿真模型simulink, LVRT 双馈异步风力,Crowbar电路,波形如图 (1)转子侧变换器采用基于定子电压定向的矢量控制策略,有功无功解耦,具备MPPT能力,采用功率外环电流内环双闭环控制结构; (2)网侧采用电网电压定向的矢量控制策略,采用电压外环电流内环控制,直流母线电压稳定,输入功率因数为1。 波形如图
在风力发电领域,双馈风机(DFIG)因其独特的优势备受关注。而低电压穿越(LVRT)能力更是DFIG在电网故障时保障稳定运行的关键。今天咱就唠唠DFIG的LVRT在MATLAB/Simulink里的仿真模型,以及其中重要的Crowbar电路。
一、矢量控制策略
转子侧变换器
转子侧变换器采用基于定子电压定向的矢量控制策略,这可是实现有功无功解耦和最大功率点跟踪(MPPT)能力的核心。其采用功率外环电流内环双闭环控制结构。来看段简单的代码示意(这里用伪代码表示大致逻辑哈):
% 功率外环
function [id_ref, iq_ref] = powerOuterLoop(p_ref, q_ref, p_measured, q_measured)
kp_p = 0.5;
ki_p = 0.1;
kp_q = 0.5;
ki_q = 0.1;
% 功率误差计算
error_p = p_ref - p_measured;
error_q = q_ref - q_measured;
% PI控制器
integral_p = integral_p + error_p * dt;
integral_q = integral_q + error_q * dt;
id_ref = kp_p * error_p + ki_p * integral_p;
iq_ref = kp_q * error_q + ki_q * integral_q;
end
% 电流内环
function [vdr, vqr] = currentInnerLoop(id_ref, iq_ref, id_measured, iq_measured)
kp_id = 0.2;
ki_id = 0.05;
kp_iq = 0.2;
ki_iq = 0.05;
% 电流误差计算
error_id = id_ref - id_measured;
error_iq = iq_ref - iq_measured;
% PI控制器
integral_id = integral_id + error_id * dt;
integral_iq = integral_iq + error_iq * dt;
vdr = kp_id * error_id + ki_id * integral_id;
vqr = kp_iq * error_iq + ki_iq * integral_q;
end在功率外环中,通过设定的功率参考值(pref和qref)与实际测量功率值(pmeasured和qmeasured)的差值,经过PI控制器得到电流参考值(idref和iqref)。电流内环再根据这些参考值与实际测量电流值的误差,经过PI控制器生成转子电压分量(vdr和vqr),从而实现对转子侧变换器的精确控制。
网侧变换器
网侧采用电网电压定向的矢量控制策略,采用电压外环电流内环控制,目的是保持直流母线电压稳定,并且让输入功率因数为1。同样来段伪代码:
% 电压外环
function [idc_ref] = voltageOuterLoop(vdc_ref, vdc_measured)
kp_vdc = 0.5;
ki_vdc = 0.1;
% 电压误差计算
error_vdc = vdc_ref - vdc_measured;
% PI控制器
integral_vdc = integral_vdc + error_vdc * dt;
idc_ref = kp_vdc * error_vdc + ki_vdc * integral_vdc;
end
% 电流内环
function [vdg, vqg] = currentInnerLoopGrid(idc_ref, iqc_ref, idc_measured, iqc_measured)
kp_idc = 0.2;
ki_idc = 0.05;
kp_iqc = 0.2;
ki_iqc = 0.05;
% 电流误差计算
error_idc = idc_ref - idc_measured;
error_iqc = iqc_ref - iqc_measured;
% PI控制器
integral_idc = integral_idc + error_idc * dt;
integral_iqc = integral_iqc + error_iqc * dt;
vdg = kp_idc * error_idc + ki_idc * integral_idc;
vqg = kp_iqc * error_iqc + ki_iqc * integral_iqc;
end电压外环通过直流母线电压参考值(vdcref)与实际测量值(vdcmeasured)的误差,经过PI控制器得到网侧d轴电流参考值(idc_ref)。电流内环再根据参考值与实际测量电流值的误差,生成网侧电压分量(vdg和vqg),实现对网侧变换器的控制,维持直流母线电压稳定和单位功率因数。
二、Crowbar电路
Crowbar电路在DFIG的LVRT中起着关键作用。当电网电压骤降时,DFIG转子侧会产生过电流和过电压,Crowbar电路此时迅速动作,将转子绕组短接,保护变换器。虽然代码上它可能更多体现在逻辑判断和开关动作上,但在Simulink模型里,可以直观看到它的工作过程。比如通过设定一个电压阈值,当检测到的电压低于这个阈值,触发Crowbar电路动作。
if (grid_voltage < crowbar_threshold)
crowbar_status = 'ON';
else
crowbar_status = 'OFF';
end这段简单代码就模拟了Crowbar电路的触发逻辑。当电网电压(gridvoltage)低于设定的Crowbar阈值(crowbarthreshold),就将Crowbar状态设为“ON”,即电路投入工作。
结合上面这些控制策略和Crowbar电路,在MATLAB/Simulink搭建好DFIG的LVRT仿真模型后,运行仿真就能得到各种波形。从波形中可以清晰看到在电网故障时,DFIG各部分的响应情况,比如转子电流、定子电压、功率等的变化,通过分析这些波形,就能进一步优化模型和控制策略,提升DFIG的低电压穿越性能。

















 300
300

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









