



100kW光伏并网发电系统MATLAB仿真模型 采用“增量电导+积分调节器”技术的MPPT控制器 VSC并网控制
最近在研究光伏并网发电系统,搭建了一个 100kW 的 MATLAB 仿真模型,今天就来和大家分享下其中用到的关键技术。
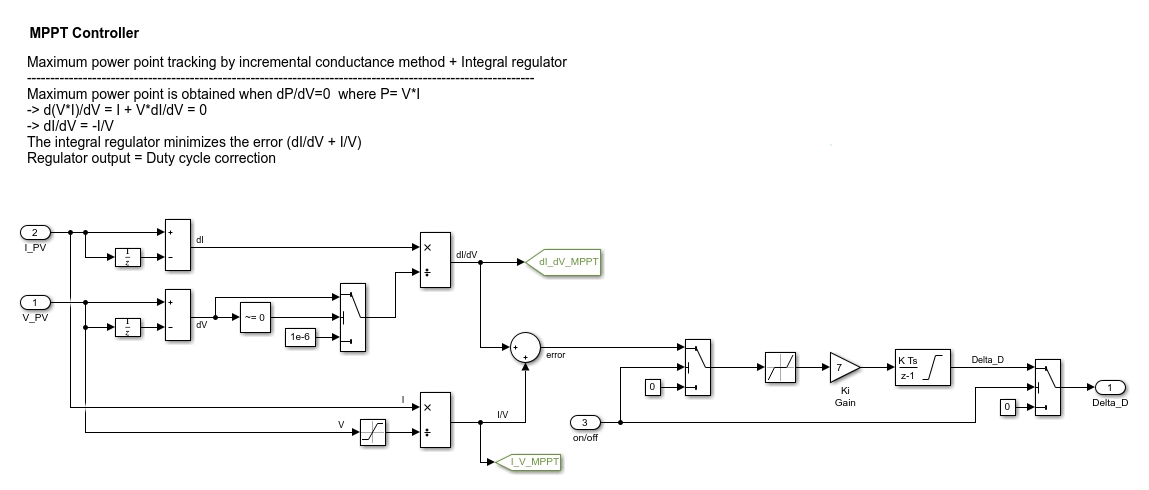
“增量电导 + 积分调节器”技术的 MPPT 控制器
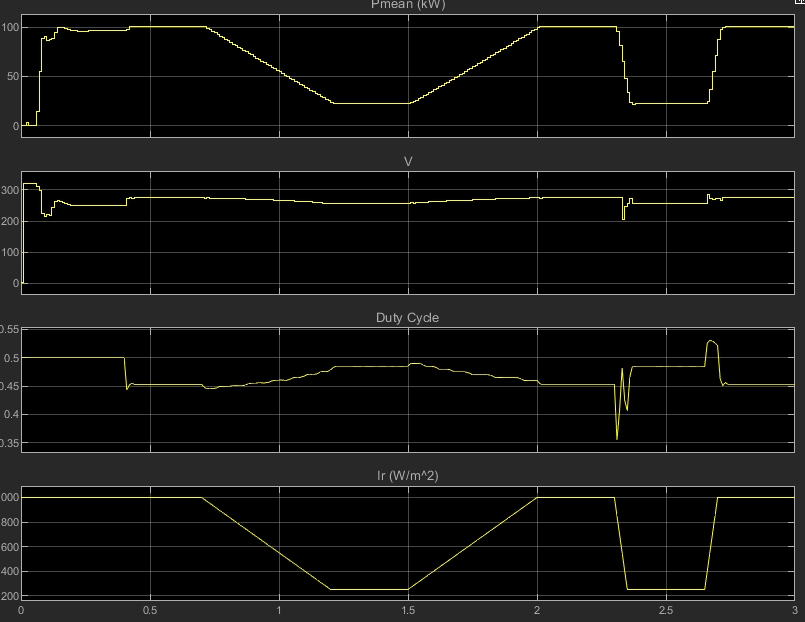
在光伏系统里,最大功率点跟踪(MPPT)控制器至关重要。我采用的是“增量电导 + 积分调节器”技术,这一组合能较为精准地跟踪光伏电池的最大功率点。
先来看下增量电导法的原理。我们知道,光伏电池的功率$P = U \times I$,对其求导可得$\frac{dP}{dU}=I + U\frac{dI}{dU}$。当$\frac{dP}{dU}=0$时,光伏电池工作在最大功率点。也就是说,当$I + U\frac{dI}{dU}=0$,即$\frac{dI}{dU}=-\frac{I}{U}$时,系统处于最大功率点状态。
用代码简单示意一下(这里只是关键部分伪代码,并非完整可运行代码):
% 初始化参数
% 假设已经获取到当前的电压U和电流I
dU = 0.01; % 电压微小变化量
U_new = U + dU;
I = getCurrent(U); % 假设这是获取对应电压下电流的函数
I_new = getCurrent(U_new);
dI = I_new - I;
if (dI/dU) == (-I/U)
% 此时接近最大功率点,可做相应处理
disp('接近最大功率点');
elseif (dI/dU) > (-I/U)
% 需增大电压
U = U + step_size;
else
% 需减小电压
U = U - step_size;
end上述代码中,通过比较$\frac{dI}{dU}$和$-\frac{I}{U}$的大小关系,来决定是增大还是减小光伏电池的工作电压,从而逐渐逼近最大功率点。
再说说积分调节器,它能对系统的误差进行积分运算,有助于消除稳态误差,让系统能更稳定地跟踪最大功率点。假设误差$e$为最大功率点对应的电压与当前电压的差值,积分环节代码可类似这样写:
% 初始化积分项
integral_term = 0;
K_i = 0.1; % 积分系数
e = reference_U - U; % 计算误差
integral_term = integral_term + e;
U_adjust = K_i * integral_term;
U = U + U_adjust; 这里通过不断累积误差,并乘以积分系数来调整电压,使得系统能更精准地跟踪最大功率点。“增量电导 + 积分调节器”技术结合,就像给光伏系统安装了一个智能的“能量追踪器”。
VSC 并网控制
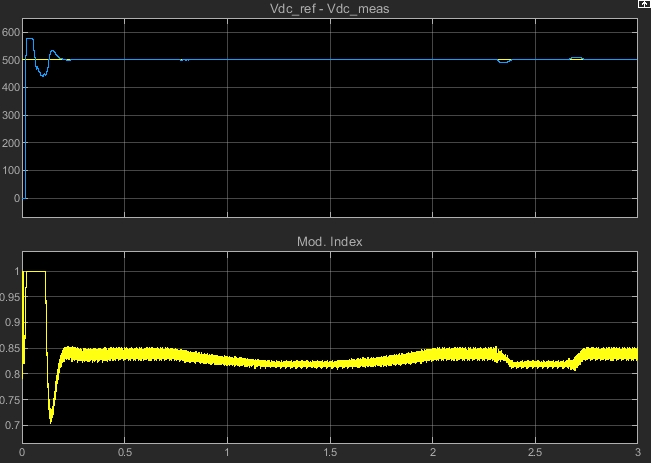
VSC(Voltage Source Converter,电压源换流器)并网控制在光伏并网系统中也占据核心地位。它能够将光伏电池产生的直流电转换为与电网同频、同相的交流电,并实现功率的灵活控制。
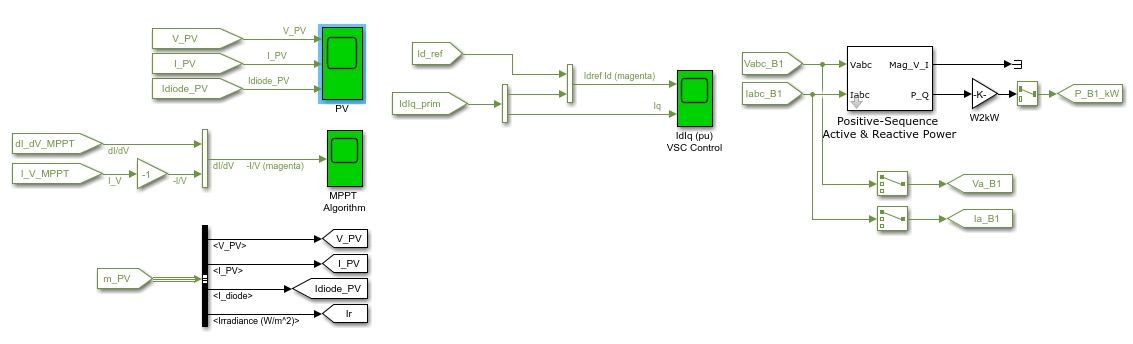
VSC 并网控制的核心是对电流的精确控制。以dq 坐标系下的电流控制为例,首先要将三相静止坐标系下的电流$ia$,$ib$,$ic$通过 Clark 变换和 Park 变换转换到 dq 坐标系下,得到$id$和$i_q$。
% Clark变换
alpha = i_a;
beta = (sqrt(3)/3)*(i_b - i_c);
% Park变换
theta = getGridAngle(); % 获取电网角度的函数
i_d = alpha*cos(theta)+beta*sin(theta);
i_q = -alpha*sin(theta)+beta*cos(theta);之后,根据电网的要求给定$id^$和$iq^$,通过PI调节器来调节电流,使得实际电流跟踪给定电流。
% PI调节器
K_p = 0.5;
K_i = 0.01;
e_d = i_d_star - i_d;
e_q = i_q_star - i_q;
integral_d = integral_d + e_d;
integral_q = integral_q + e_q;
v_d = K_p*e_d + K_i*integral_d;
v_q = K_p*e_q + K_i*integral_q; 最后再通过反 Park 变换和反 Clark 变换,将 dq 坐标系下的电压转换回三相静止坐标系,用于控制 VSC 的开关管。
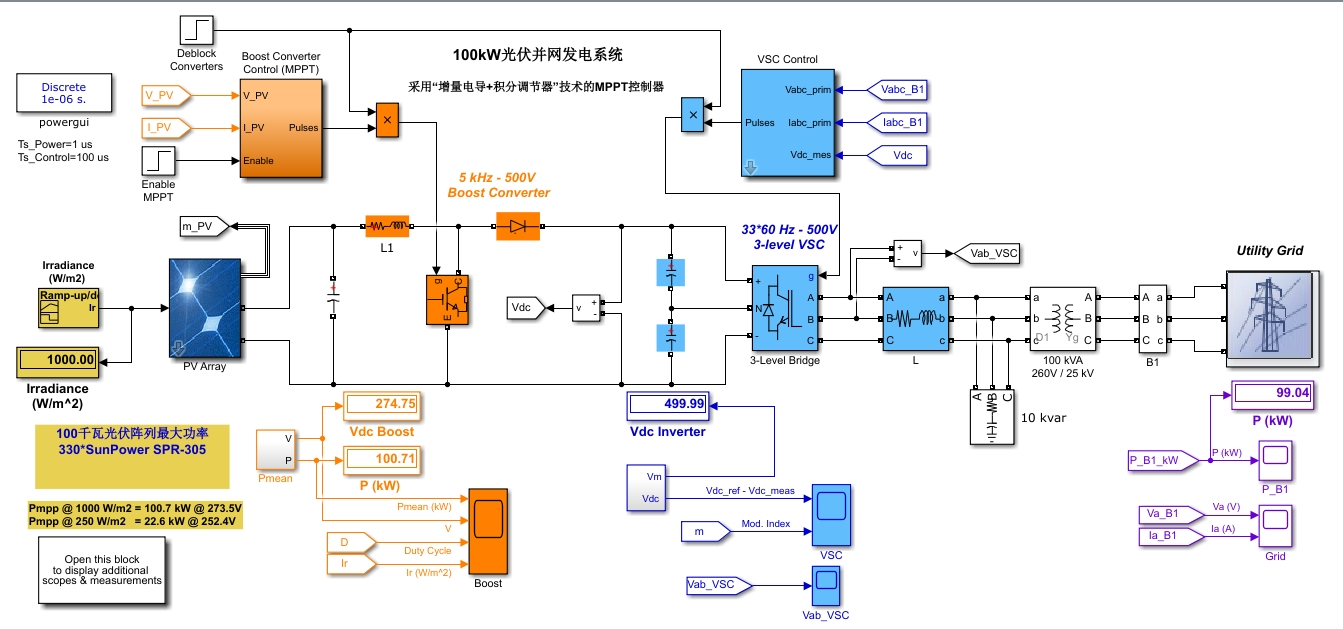
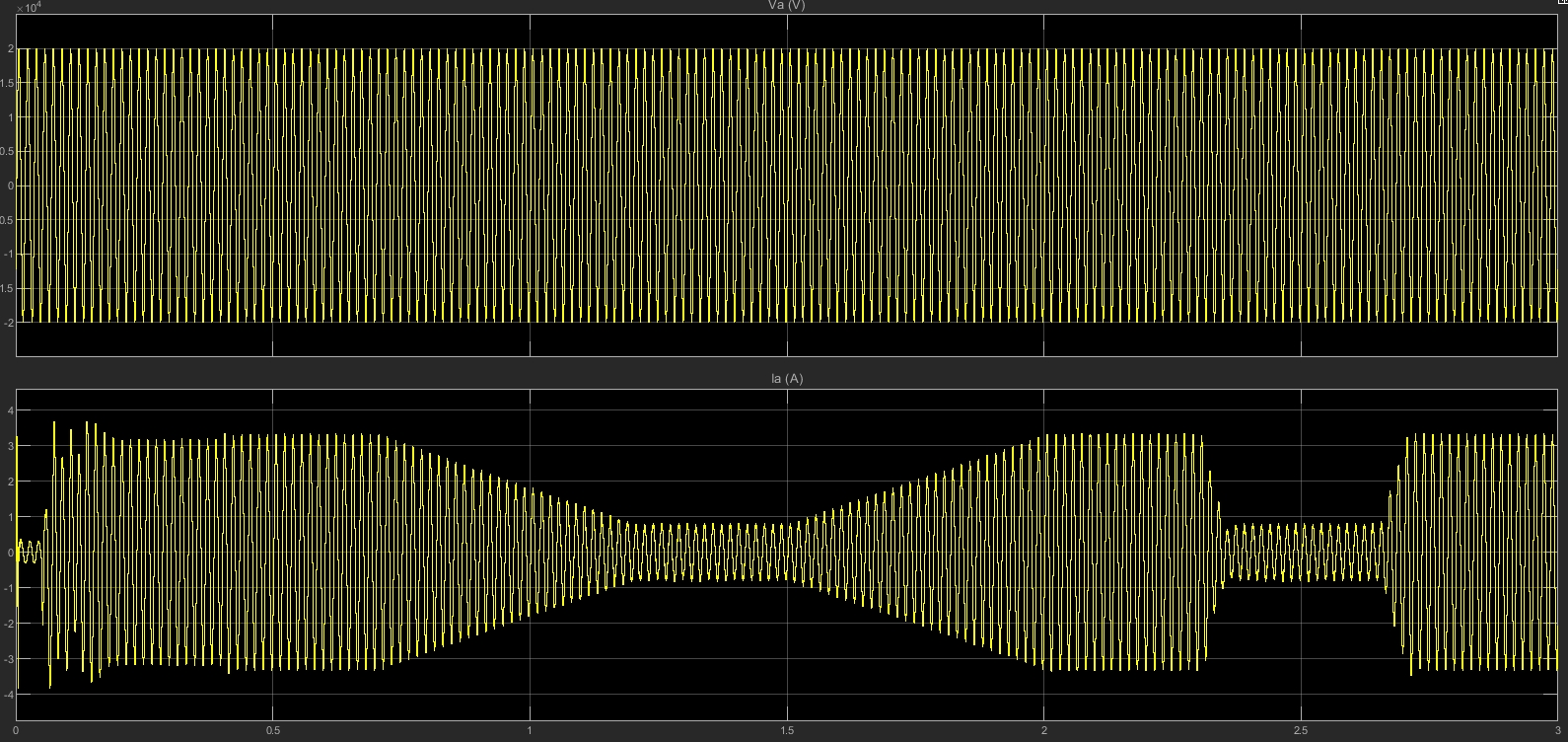
通过以上“增量电导 + 积分调节器”技术的 MPPT 控制器和 VSC 并网控制技术,构建的 100kW 光伏并网发电系统 MATLAB 仿真模型能较好地模拟实际的光伏并网运行情况。喜欢的可以自己研究,深入挖掘其中更多有趣的细节和优化方向。说不定在你的探索中,还能发现一些更巧妙的改进方法,为光伏并网技术的发展添砖加瓦呢!

















 2144
2144

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









