



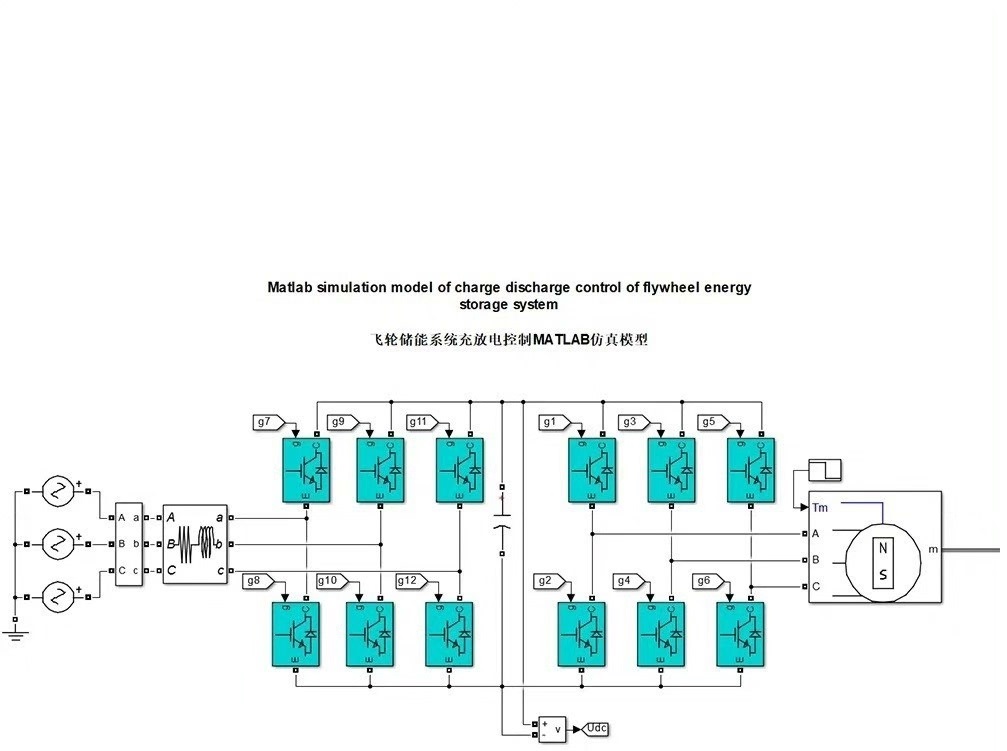
飞轮储能 背靠背变流器 充放电控制 并网控制 matlab/simulink仿真模型 包括机侧和网侧变流器及其控制,飞轮采用PMSM,直流母线电压很稳,波形已调试好可直接运行
飞轮储能系统作为一种高效、快速响应的储能技术,近年来受到了广泛关注。其核心在于通过高速旋转的飞轮储存机械能,并通过变流器将其转换为电能。今天,我将分享一下自己在飞轮储能系统仿真建模中的一些经验和心得,特别是关于背靠背变流器的控制策略和仿真模型的搭建。
1. 飞轮储能系统概述
飞轮储能系统主要由飞轮本体、背靠背变流器、控制系统以及能量管理系统组成。其中,背靠背变流器是连接飞轮和电网的关键设备,负责实现能量的双向流动。飞轮通常采用永磁同步电机(PMSM)作为驱动和发电装置,具有高效、响应快等优点。
在系统运行过程中,飞轮通过变流器吸收电网的能量,将其转化为机械能储存起来;当需要释放能量时,飞轮则通过变流器将机械能转换为电能,回馈给电网。整个系统的核心在于对变流器的精确控制,以确保能量的高效转换和系统的稳定运行。
2. 背靠背变流器的结构与控制
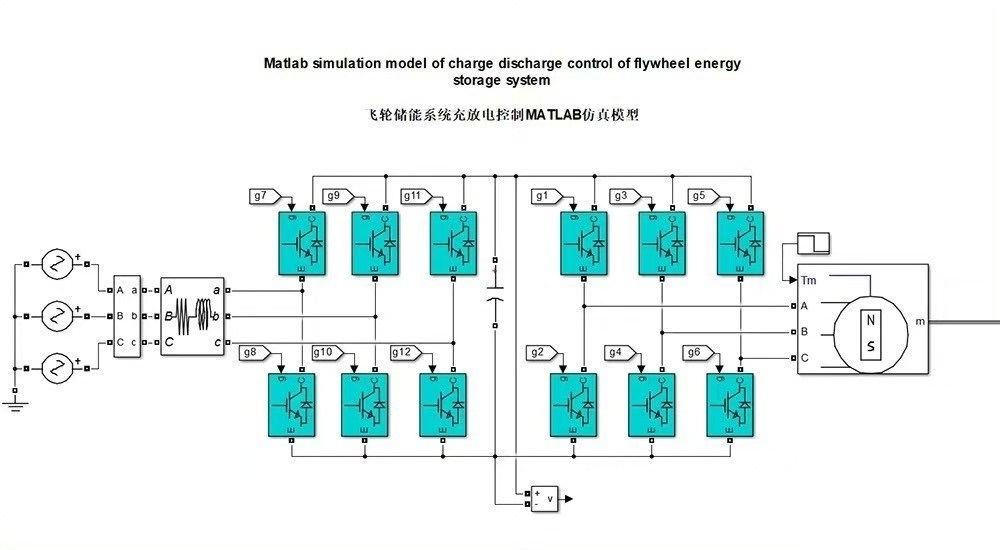
背靠背变流器由机侧变流器和网侧变流器两部分组成。机侧变流器负责与飞轮本体进行能量交换,而网侧变流器则负责与电网进行能量交换。两部分变流器通过直流母线连接,直流母线电压的稳定性直接影响整个系统的性能。
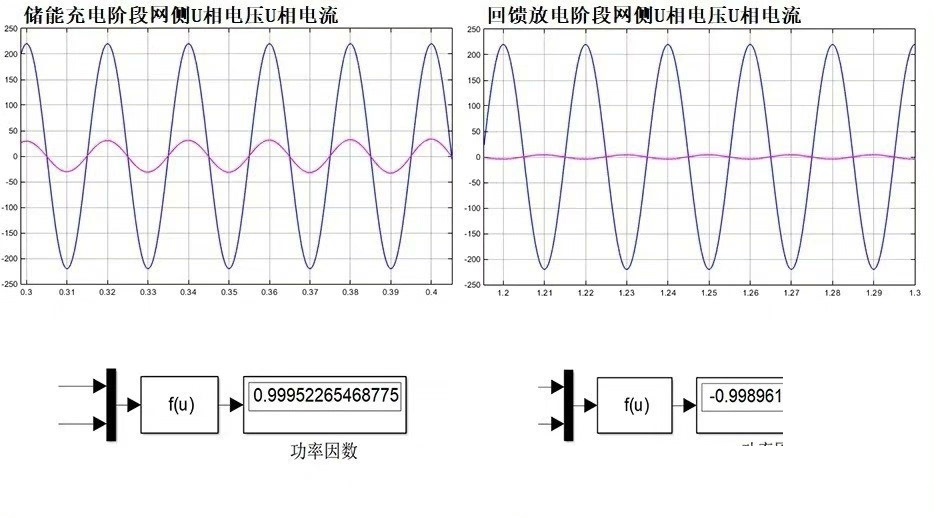
在控制方面,机侧变流器通常采用矢量控制策略,以实现对飞轮转速的精确调节;网侧变流器则采用功率因数校正(PFC)控制策略,以实现与电网的高效能量交换。以下是机侧变流器的控制算法示例:
% 机侧变流器矢量控制算法
function [id_ref, iq_ref] = machine_side_control(flywheel_speed, load_torque)
% 参数初始化
Kp = 0.5; % 比例系数
Ki = 0.1; % 积分系数
% 转速误差计算
speed_error = flywheel_speed_ref - flywheel_speed;
% 转矩调节器
torque_ref = Kp * speed_error + Ki * integral(speed_error);
% 电流参考计算
id_ref = (load_torque - torque_ref) / (2 * pi * f0);
iq_ref = torque_ref / (2 * pi * f0);
end3. 充放电控制策略
飞轮储能系统的充放电控制是系统运行的关键环节。在充电过程中,系统需要将电网的电能转化为飞轮的机械能;在放电过程中,则需要将飞轮的机械能转化为电能回馈给电网。
为了实现高效的充放电控制,通常采用基于状态的控制策略。以下是充放电控制的逻辑示例:
% 充放电控制逻辑
function control_mode = charge_discharge_control(battery_SOC, grid_power)
% 参数初始化
SOC_low = 0.2; % 低电量阈值
SOC_high = 0.8; % 高电量阈值
if battery_SOC < SOC_low
control_mode = 'charge';
elseif battery_SOC > SOC_high
control_mode = 'discharge';
else
control_mode = 'balance';
end
end4. 并网控制策略
并网控制是飞轮储能系统与电网交互的核心环节。为了确保系统的稳定运行,通常采用同步锁相环(PLL)技术实现与电网的同步。以下是并网控制的示例:
% 并网控制算法
function [voltage_ref, current_ref] = grid_sync_control(grid_voltage, grid_frequency)
% 参数初始化
Kp_pll = 0.1; % PLL比例系数
Ki_pll = 0.01; % PLL积分系数
% 频率误差计算
frequency_error = grid_frequency_ref - grid_frequency;
% PLL调节器
phase_ref = Kp_pll * frequency_error + Ki_pll * integral(frequency_error);
% 电压和电流参考
voltage_ref = V_grid * sin(2 * pi * grid_frequency * t + phase_ref);
current_ref = I_grid * sin(2 * pi * grid_frequency * t + phase_ref - pi/2);
end5. Matlab/Simulink仿真模型
为了验证飞轮储能系统的性能,我搭建了一个完整的Matlab/Simulink仿真模型。模型包括飞轮本体、机侧变流器、网侧变流器以及控制系统。以下是仿真模型的搭建步骤:
- 飞轮本体建模:使用 Simscape Electrical 模块搭建飞轮本体模型,设置飞轮的转动惯量、摩擦系数等参数。
- 变流器建模:使用 Simulink 的电力电子模块搭建背靠背变流器模型,设置IGBT的开关频率、死区时间等参数。
- 控制系统建模:使用 Simulink 的控制设计模块搭建控制系统的模型,包括矢量控制、PFC控制以及同步锁相环等算法。
- 仿真运行:设置仿真参数(如仿真时间、求解器等),运行仿真并观察仿真结果。
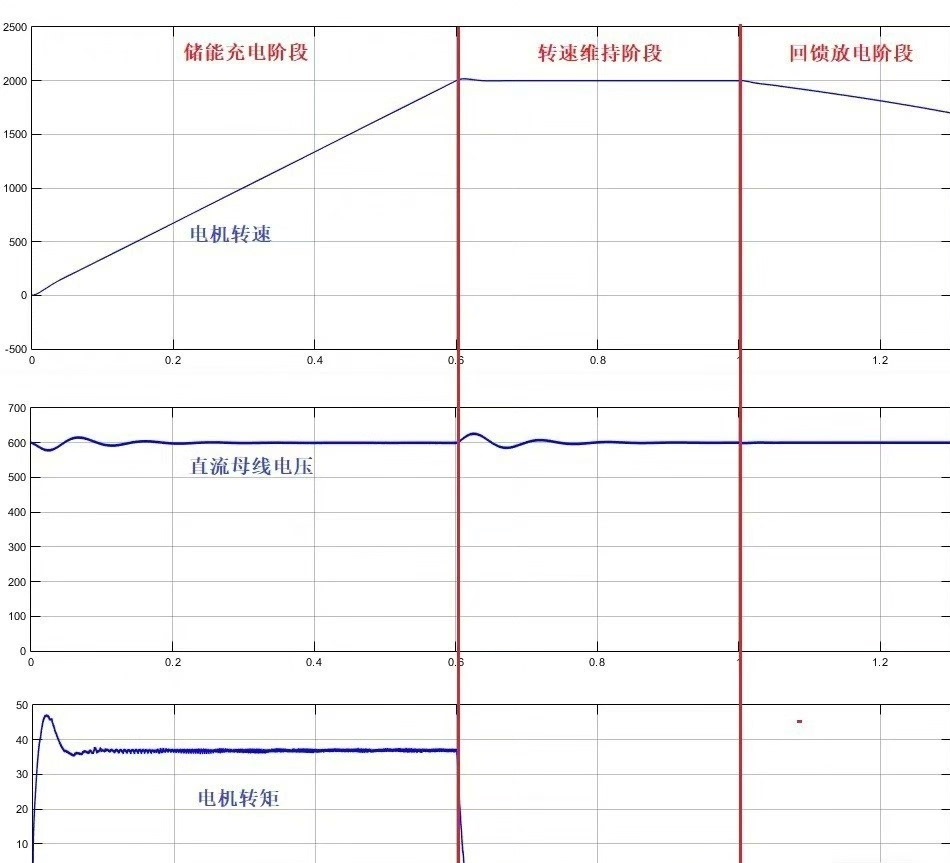
仿真结果表明,系统的直流母线电压非常稳定,波形已经调试到可以直接运行的状态。以下是仿真波形图:
6. 总结
通过本次仿真建模,我对飞轮储能系统的运行原理和控制策略有了更深入的理解。背靠背变流器在系统中的作用至关重要,其控制策略的优化直接影响系统的性能。未来,我计划进一步优化控制算法,提升系统的效率和响应速度,为实际应用提供更可靠的解决方案。
如果你对飞轮储能系统感兴趣,欢迎一起探讨!

















 1539
1539

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}