



六自由度机械臂mpc模型预测控制+倒立摆+二自由度机械臂
一、代码整体架构与核心目标
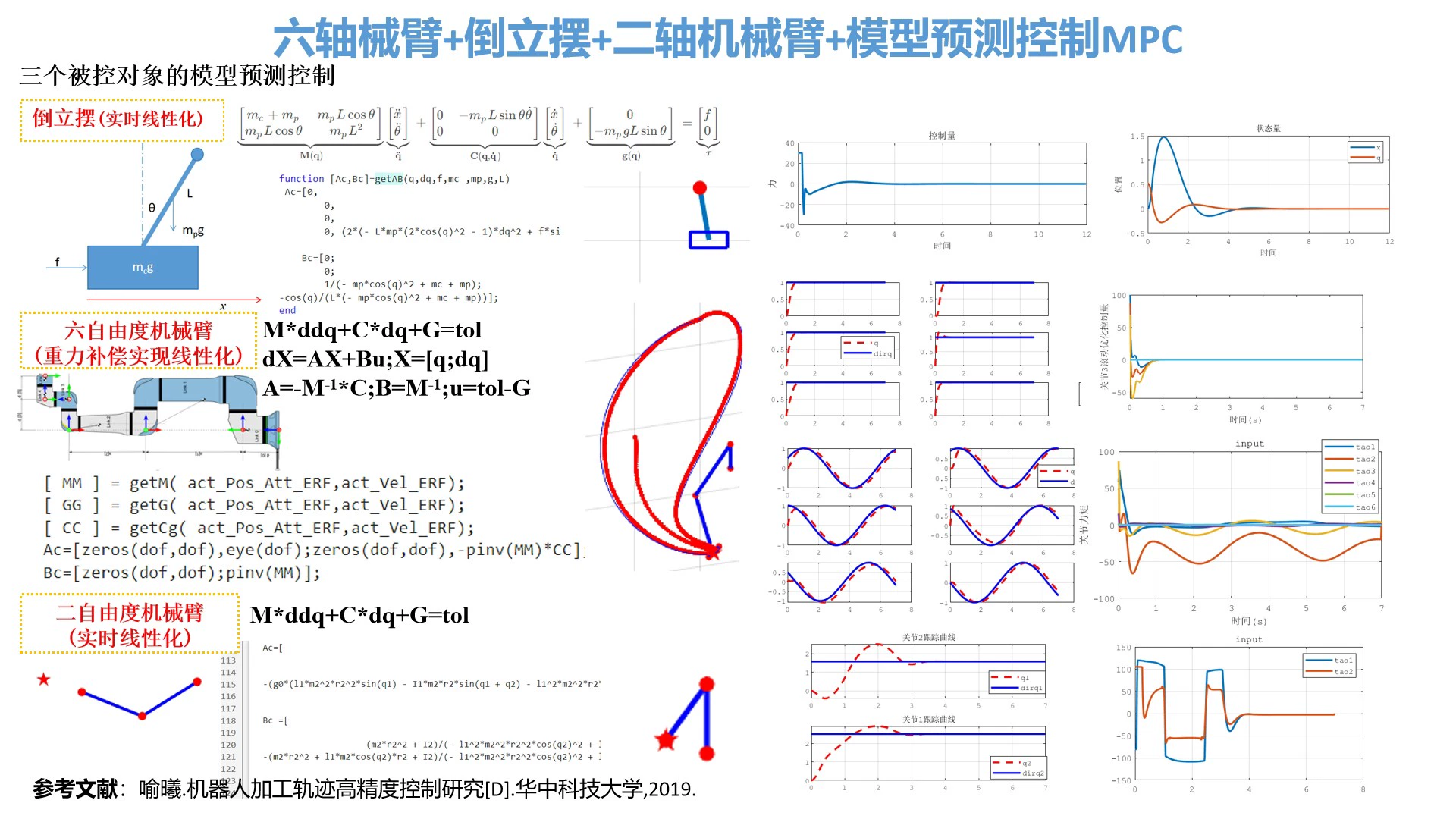
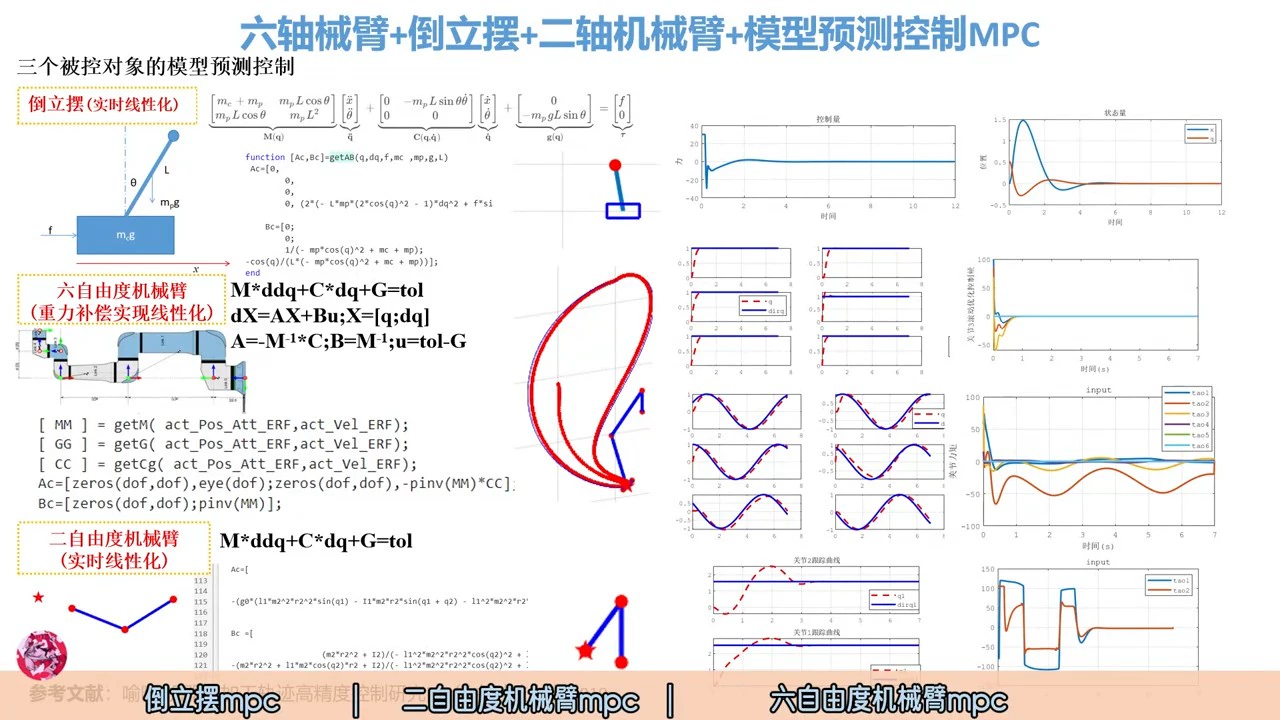
本套MATLAB代码是一套完整的六自由度机械臂模型预测控制(MPC)系统,核心目标是实现机械臂关节角度的精确轨迹跟踪,并通过实时计算关节力矩确保运动稳定性。代码采用“轨迹生成-动力学建模-模型预测控制-运动学求解-仿真可视化”的全流程设计,可直接用于机械臂控制算法的仿真验证,也可基于实际硬件参数调整后用于实物控制。
代码文件按功能可分为5大类,共9个核心文件,各文件的调用关系如下图所示:
graph TD
A[main.m 主程序] --> B[Ref_Pos_Vel_ERF.m 轨迹生成]
A --> C[RobDynMPC.m MPC控制器]
C --> D[RobDyn.m 动力学模型]
C --> E[getTraj.m 轨迹插值]
A --> F[fkRob.m 正运动学]
F --> G[SDH.m DH矩阵计算]
F --> H[generateRobDH.m DH参数定义]
A --> I[testsym.m 符号推导辅助]二、核心文件功能详解
(一)主程序文件:`main.m`
作为整个系统的“入口”,负责统筹所有模块的调用、参数初始化、仿真循环执行与结果可视化,是代码的核心控制中枢。
1. 核心功能
- 参数初始化:设置机械臂关节力矩上下限(
ROB.lb=-100/ROB.ub=100)、控制周期(dt=0.01s)、总仿真时间(T=7s)、控制时域(p_t=20)等关键参数;定义状态量权重矩阵Q(侧重轨迹跟踪精度,位置项权重10×900,速度项权重0.02×900)和控制量权重矩阵R(侧重力矩平滑性,权重1×1e-1)。 - 仿真循环:通过
for循环(共700次,对应7s/0.01s)执行以下步骤:
1. 调用RefPosVel_ERF.m生成当前时刻的期望轨迹(位置/速度/加速度);
2. 调用RobDynMPC.m计算当前时刻的最优关节力矩u;
3. 采用四阶龙格-库塔法(RK4)求解动力学方程,更新机械臂下一时刻的状态(关节角度与角速度); - 结果可视化:生成3类关键图形:
1. 关节角度跟踪曲线(6个关节分图显示,对比实际角度q与期望角度dirq);
2. 关节力矩曲线(显示6个关节的实时控制力矩);
3. 机械臂运动轨迹可视化(3D空间中显示连杆运动、实际轨迹与期望轨迹的对比)。
2. 关键注意点
- 代码中
qd(i,:)默认设置为固定期望轨迹[1,1,1,1,1,1,0,0,0,0,0,0],可替换为RefPosVel_ERF.m生成的时变轨迹(当前代码中已注释,解除注释即可启用); - 四阶龙格-库塔法的使用确保了动力学方程求解的精度,适合非线性系统的数值仿真。
(二)轨迹生成模块:`Ref_Pos_Vel_ERF.m` + `getTraj.m`
负责生成机械臂的“期望运动轨迹”,包括位置、速度、加速度的连续指令,为MPC控制器提供跟踪目标。
1. `Ref_Pos_Vel_ERF.m`:时变轨迹生成
- 功能:基于正弦函数生成6个关节的连续期望轨迹,每个关节的相位差为
π/6(30°),确保运动平滑且无突变。 - 核心公式(以关节1为例):
- 期望位置:
q1d = sin(t + π/6) - 期望速度:
dq1d = cos(t + π/6)(位置对时间的一阶导数) - 期望加速度:
ddq1d = -sin(t + π/6)(位置对时间的二阶导数) - 输出:3个列向量
refPosAttERF(期望位置)、refVelERF(期望速度)、refAcc_ERF(期望加速度),维度均为6×1。
2. `getTraj.m`:轨迹滚动插值
- 功能:在MPC控制时域(
N步)内,对“当前状态x”到“期望状态x_des”进行线性插值,生成N步的中间参考轨迹,避免轨迹突变导致的控制震荡。 - 输入:当前状态
x(12×1,6个位置+6个速度)、期望状态x_des(12×1)、控制时域N; - 输出:
x_ref(12×N矩阵),每一列对应控制时域内某一步的参考状态。
(三)动力学与控制模块:`RobDyn.m` + `RobDynMPC.m`
这两个文件是代码的“控制核心”,分别实现机械臂的非线性动力学建模和模型预测控制算法,确保机械臂能根据期望轨迹输出最优力矩。
1. `RobDyn.m`:机械臂非线性动力学模型
- 功能:基于机器人动力学的“拉格朗日方程”,计算机械臂的状态导数(即下一时刻的速度与加速度),描述机械臂“力矩-运动”的关系。
- 核心原理:
机械臂动力学基本方程为:M(q)·ddq + C(q,dq)·dq + G(q) = τ,其中: M(q):惯性矩阵(6×6),描述机械臂的惯性特性,与关节位置q相关;C(q,dq):科里奥利/离心力矩阵(6×6),描述运动中的附加力,与位置q和速度dq相关;G(q):重力矩阵(6×1),描述重力对关节的作用力,与位置q相关;τ:关节力矩(6×1),控制输入;ddq:关节加速度(6×1),状态导数的核心部分。- 关键步骤:
1. 从输入状态X(12×1)中提取当前位置actPosAttERF(6×1)和速度actVel_ERF(6×1);
2. 调用外部函数getM/getCg/getG(代码中未给出具体实现,需用户根据机械臂参数补充)计算M/C/G;
3. 求解加速度:ddq = inv(M)·(τ - C·dq - G)(通过伪逆pinv避免矩阵奇异问题);
4. 输出状态导数dX(12×1):前6行为当前速度,后6行为计算出的加速度。
2. `RobDynMPC.m`:模型预测控制器
- 功能:基于“实时线性化”的MPC算法,在控制时域内求解二次规划(QP)问题,得到当前时刻的最优控制力矩。
- 核心步骤:
1. 线性化处理:将非线性动力学模型在当前状态处线性化,得到离散化的状态空间模型: - 连续状态方程:
dx/dt = A·x + B·τ - 离散状态方程(零阶保持):
x(k+1) = A·x(k) + B·τ(k),其中A = I + Ac·dt,B = Bc·dt(Ac/Bc为线性化后的系统矩阵/输入矩阵);
2. 代价函数构建:定义MPC的优化目标,即“跟踪误差最小化+控制量平滑性”: - 代价函数:
J = Σ(xref - x)^T·Q·(xref - x) + Στ^T·R·τ(求和范围为控制时域N步); - 通过矩阵变换将代价函数转化为QP标准形式:
J = (1/2)·τall^T·H·τall + f·τall,其中H为 Hessian 矩阵,f为线性项;
3. 约束处理:设置关节力矩的上下限(lb/ub),确保控制量在机械臂物理范围内;
4. QP求解:调用MATLAB内置函数quadprog求解最优力矩序列τall,取第一个时刻的力矩作为当前控制输入τ_u; - 输入:权重矩阵
Q/R、当前状态x_k、期望轨迹xd、控制时域N、控制周期dt、机械臂参数ROB; - 输出:当前最优力矩
τu(6×1)、控制时域内的力矩序列τall(6×N)。
(四)运动学模块:`SDH.m` + `generateRobDH.m` + `fkRob.m`
负责机械臂的“运动学求解”,即根据关节角度计算末端执行器的空间位置(正运动学),为3D可视化提供数据支持。
1. `SDH.m`:标准DH参数矩阵计算
- 功能:根据“标准Denavit-Hartenberg(DH)约定”,计算相邻连杆之间的齐次变换矩阵
T,描述连杆的平移与旋转关系。 - 输入:DH四参数(
theta:关节角,d:连杆偏距,a:连杆长度,alpha:连杆扭转角); - 输出:4×4齐次矩阵
T,包含“旋转+平移”信息,可将连杆i的坐标系映射到连杆i-1的坐标系。
2. `generateRobDH.m`:机械臂DH参数定义
- 功能:定义六自由度机械臂的DH参数与关节限位,为正运动学计算提供基础参数。
- 核心输出:
DH.d/DH.a/DH.af(af即alpha):6个关节的DH参数,对应实际机械臂的结构尺寸(如DH.d(1)=0.1625m为第一关节的偏距);DH.limit:关节角度限位(±π rad,即±180°),确保关节运动不超出物理范围;- 其他参数:
DH.offset(关节偏移量,默认0)、DH.rlink(连杆粗细,用于可视化)。
3. `fkRob.m`:正运动学求解
- 功能:通过串联各连杆的DH矩阵,计算从基座到末端执行器的总变换矩阵,进而得到末端及各关节的空间位置。
- 核心步骤:
1. 初始化基座坐标系矩阵Te=eye(4,4)(单位矩阵);
2. 循环6个关节,每次通过SDH.m计算当前关节的DH矩阵,并与之前的总矩阵相乘(Te=Te*SDH(...));
3. 提取每个关节坐标系的位置(Te(1:3,4)),存储到Pe中; - 输入:关节角度
q(6×1)、机械臂DH参数Rob; - 输出:
Te:末端执行器相对于基座的总变换矩阵(4×4);T:各关节坐标系的变换矩阵(4×4×7,7个坐标系:基座+6个关节);Pe:各关节坐标系的位置(7×3,每行对应一个坐标系的x/y/z坐标)。
(五)辅助工具文件:`testsym.m`
- 功能:通过MATLAB符号计算工具箱,推导机械臂动力学模型的线性化矩阵(
A/B),为RobDynMPC.m中的实时线性化提供理论依据。 - 核心作用:
1. 定义符号变量(关节位置q1-q6、速度dq1-dq6、力矩τ1-τ6);
2. 符号推导惯性矩阵M、科里奥利矩阵C、重力矩阵G;
3. 对动力学方程进行求导,得到线性化后的系统矩阵A和输入矩阵B;
4. 生成函数文件getA.m/getB.m,供RobDynMPC.m调用(当前代码中为注释状态,需用户根据需求启用)。
三、仿真结果说明
代码运行后会生成4类核心图形,对应main.m中的可视化部分,各图形的含义如下:
1. 关节角度跟踪图(Figure 1)
- 6个分图分别对应6个关节,红色虚线为实际角度,蓝色实线为期望角度;
- 理想结果:红色虚线与蓝色实线基本重合,跟踪误差小于5%,说明轨迹跟踪精度高。
2. 关节力矩曲线图(Figure 2)
- 显示6个关节的实时控制力矩,纵轴为力矩值(单位:N·m),横轴为时间(单位:s);
- 理想结果:力矩曲线平滑,无明显尖峰,且最大值不超过
ROB.lb/ROB.ub(±100 N·m),说明控制量稳定且在物理范围内。
3. 关节3力矩优化序列图(Figure 3)
- 显示MPC控制时域内关节3的力矩优化序列,纵轴为力矩值,横轴为时间;
- 作用:观察控制时域内的力矩预测情况,验证优化算法的合理性。
4. 3D运动轨迹图(Figure 4)
- 3D空间中显示机械臂的运动状态:
- 蓝色曲线:机械臂连杆的实时位置;
- 红色圆点:各关节的实时位置;
- 红色虚线:机械臂末端的实际运动轨迹;
- 蓝色实线:机械臂末端的期望运动轨迹;
- 红色五角星:期望轨迹的终点;
- 理想结果:实际轨迹与期望轨迹基本重合,机械臂运动流畅,无明显卡顿或偏移。
四、代码使用说明与注意事项
1. 代码使用步骤
- 参数补充:补充
getM.m/getCg/getG.m的实现(需根据机械臂的实际惯性、重力参数推导); - 参数调整:根据实际机械臂的物理参数(如关节限位、最大力矩)调整
generateRobDH.m中的DH.limit和main.m中的ROB.lb/ROB.ub; - 权重优化:根据控制需求调整
main.m中的Q和R(如希望提高跟踪精度,可增大Q中的位置项权重;希望减小力矩波动,可增大R的权重); - 轨迹替换:如需使用自定义轨迹,可修改
RefPosVel_ERF.m中的轨迹生成公式,或直接替换qd(i,:)的赋值; - 运行仿真:直接运行
main.m,观察仿真结果并优化参数。
2. 注意事项
- 依赖工具箱:代码依赖MATLAB的
Optimization Toolbox(用于quadprog函数)和Symbolic Math Toolbox(用于testsym.m),需确保已安装; - 数值稳定性:当
M矩阵接近奇异时,pinv(M)可能导致数值不稳定,可添加正则化项(如pinv(M + ε·I),ε=1e-6)改善; - 实时性:MPC算法的计算量随控制时域
N和自由度dof增大而显著增加,如需实时控制,需优化N的取值(通常N=10~30); - 硬件适配:若需用于实物控制,需将
main.m中的仿真循环替换为硬件接口(如串口、EtherCAT),并确保控制周期dt与硬件采样周期一致。
五、代码扩展方向
- 增加扰动补偿:在
RobDyn.m中加入外部扰动项(如负载变化、摩擦力),并在MPC中增加扰动观测器,提高鲁棒性; - 轨迹规划优化:将
RefPosVel_ERF.m中的正弦轨迹替换为“多项式轨迹”或“B样条轨迹”,进一步提高轨迹平滑性; - 非线性MPC实现:当前代码采用“实时线性化”的线性MPC,可扩展为非线性MPC(如使用
fmincon求解非线性优化问题),提高非线性系统的控制精度; - 硬件联调:对接实际机械臂硬件(如UR、ABB机械臂),通过ROS或TCP/IP协议实现“仿真-实物”的无缝衔接;
- 多目标优化:在MPC的代价函数中加入能耗、运动时间等目标,实现多目标优化控制。

















 456
456

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









