




采用的方法为最小二乘法:
首先我们要构建以下方程:
我们讨论角点的情况:
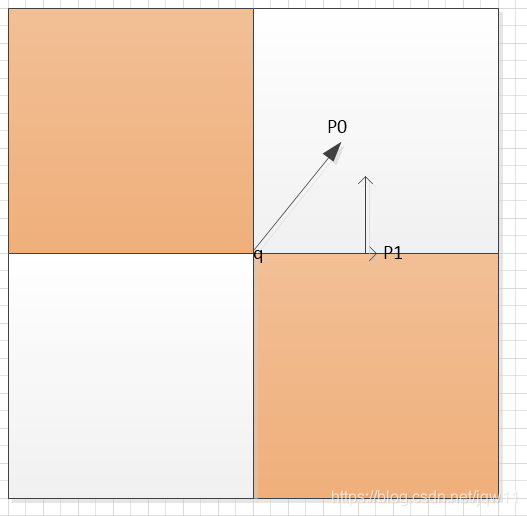
q是我们要求的角点
p0和p1为q周围的点
(q-pi)为一个向量
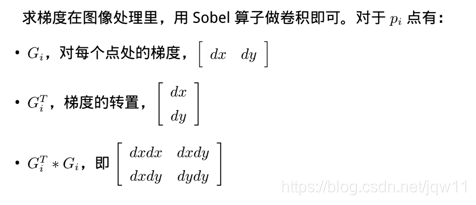
Gi为pi处的梯度
所以满足一下公式
Gi*(q-pi)=0
有以下两种情况:
(1)p0处的梯度为0,虽然(q-pi)不为0
(2)p1处(q-pi)和p1处的梯度垂直,因此乘积为0.
Gi*(q-pi)=0
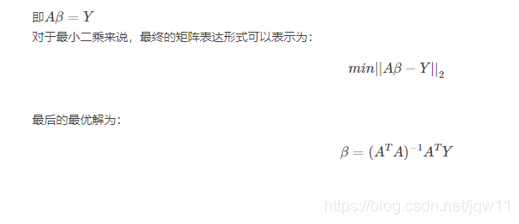
我们写成最小二乘的形式:
Gi*q = Gi*pi
根据最小二乘解:
同理可得:
![]()
 本文详细介绍了一种基于最小二乘法的亚像素角点检测算法。通过构建数学模型,利用周围点的梯度信息,迭代优化角点位置,直至满足预设的精度或迭代次数。文中还涉及了高斯权重的计算,以及如何处理迭代过程中可能出现的收敛问题。
本文详细介绍了一种基于最小二乘法的亚像素角点检测算法。通过构建数学模型,利用周围点的梯度信息,迭代优化角点位置,直至满足预设的精度或迭代次数。文中还涉及了高斯权重的计算,以及如何处理迭代过程中可能出现的收敛问题。
采用的方法为最小二乘法:
首先我们要构建以下方程:
我们讨论角点的情况:
q是我们要求的角点
p0和p1为q周围的点
(q-pi)为一个向量
Gi为pi处的梯度
所以满足一下公式
Gi*(q-pi)=0
有以下两种情况:
(1)p0处的梯度为0,虽然(q-pi)不为0
(2)p1处(q-pi)和p1处的梯度垂直,因此乘积为0.
Gi*(q-pi)=0
我们写成最小二乘的形式:
Gi*q = Gi*pi
根据最小二乘解:
同理可得:
![]()
 3858
4440
3858
4440

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























