







在未知环境的条件下,通过反复模拟获得样本数据,近似估计给定策略下的价值函数 vπv_{\pi}vπ
import gym
import numpy as np
from matplotlib import pyplot
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from collections import defaultdict
from functools import partial
plt.style.use('ggplot')
env = gym.make('Blackjack-v0')
def sample_policy(observation):
score, dealer_score, usable_ace = observation
return 0 if score >= 20 else 1
def generate_episode(policy, env):
# we initialize the list for storing states, actions, and rewards
states, actions, rewards = [], [], []
# Initialize the gym environment
observation = env.reset()
while True:
# append the states to the states list
states.append(observation)
# now, we select an action using our sample_policy function and append the action to actions list
action = sample_policy(observation)
actions.append(action)
# We perform the action in the environment according to our sample_policy, move to the next state
# and receive reward
observation, reward, done, info = env.step(action)
rewards.append(reward)
# Break if the state is a terminal state
if done:
break
return states, actions, rewards
def first_visit_mc_prediction(policy, env, n_episodes):
# First, we initialize the empty value table as a dictionary for storing the values of each state
value_table = defaultdict(float)
N = defaultdict(int)
for _ in range(n_episodes):
# Next, we generate the epsiode and store the states and rewards
states, _, rewards = generate_episode(policy, env)
returns = 0
# Then for each step, we store the rewards to a variable R and states to S, and we calculate
# returns as a sum of rewards
for t in range(len(states) - 1, -1, -1):
R = rewards[t]
S = states[t]
returns += R
# Now to perform first visit MC, we check if the episode is visited for the first time, if yes,
# we simply take the average of returns and assign the value of the state as an average of returns
if S not in states[:t]:
N[S] += 1
value_table[S] += (returns - value_table[S]) / N[S]
return value_table
value = first_visit_mc_prediction(sample_policy, env, n_episodes=500000)
for i in range(10):
print(value.popitem())
((4, 1, False), -0.5786802030456852)
((14, 1, True), -0.43960396039603966)
((4, 9, False), -0.42211055276381915)
((13, 3, True), -0.22764227642276424)
((7, 3, False), -0.5780911062906736)
((12, 1, True), -0.4090909090909092)
((15, 8, True), -0.2540983606557379)
((4, 3, False), -0.534246575342466)
((4, 2, False), -0.48458149779735665)
((4, 8, False), -0.4603174603174603)
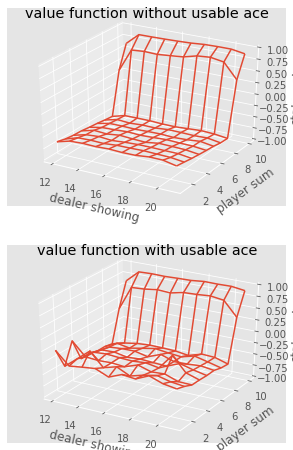
def plot_blackjack(V, ax1, ax2):
player_sum = np.arange(12, 21 + 1)
dealer_show = np.arange(1, 10 + 1)
usable_ace = np.array([False, True])
state_values = np.zeros((len(player_sum), len(dealer_show), len(usable_ace)))
for i, player in enumerate(player_sum):
for j, dealer in enumerate(dealer_show):
for k, ace in enumerate(usable_ace):
state_values[i, j, k] = V[player, dealer, ace]
X, Y = np.meshgrid(player_sum, dealer_show)
ax1.plot_wireframe(X, Y, state_values[:, :, 0])
ax2.plot_wireframe(X, Y, state_values[:, :, 1])
for ax in ax1, ax2:
ax.set_zlim(-1, 1)
ax.set_ylabel('player sum')
ax.set_xlabel('dealer showing')
ax.set_zlabel('state-value')
fig, axes = pyplot.subplots(nrows=2, figsize=(5, 8),
subplot_kw={'projection': '3d'})
axes[0].set_title('value function without usable ace')
axes[1].set_title('value function with usable ace')
plot_blackjack(value, axes[0], axes[1])


















 2486
2486

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











