







1.使用rqt_console和rqt_logger_level
rosrun rqt_console rqt_console
执行完该命令后有如下界面:

继续执行如下命令:
rosrun rqt_logger_level rqt_logger_level
此时有如下新界面:

接下来继续运行如下命令:
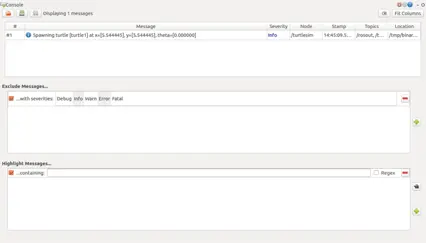
rosrun turtlesim turtlesim_node
上面第一个截图更新为如下:
接下来执行如下命令发布一个Topic:
rostopic pub /turtle1/cmd_velgeometry_msgs/Twist -r 1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 5105
5105

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











