




 这段代码展示了使用MuJoCo库进行动力学模拟和控制器设计的过程。函数`f`实现了从状态到输出的动力学方程,通过计算雅可比矩阵A和输入矩阵B来求解LQR控制器。同时,给出了一个双连杆摆动的MuJoCo模型,包括世界背景、两个连杆、关节和传感器定义。在主函数中,实现了控制器初始化、数据保存和模拟循环,用于实时控制和数据记录。
这段代码展示了使用MuJoCo库进行动力学模拟和控制器设计的过程。函数`f`实现了从状态到输出的动力学方程,通过计算雅可比矩阵A和输入矩阵B来求解LQR控制器。同时,给出了一个双连杆摆动的MuJoCo模型,包括世界背景、两个连杆、关节和传感器定义。在主函数中,实现了控制器初始化、数据保存和模拟循环,用于实时控制和数据记录。
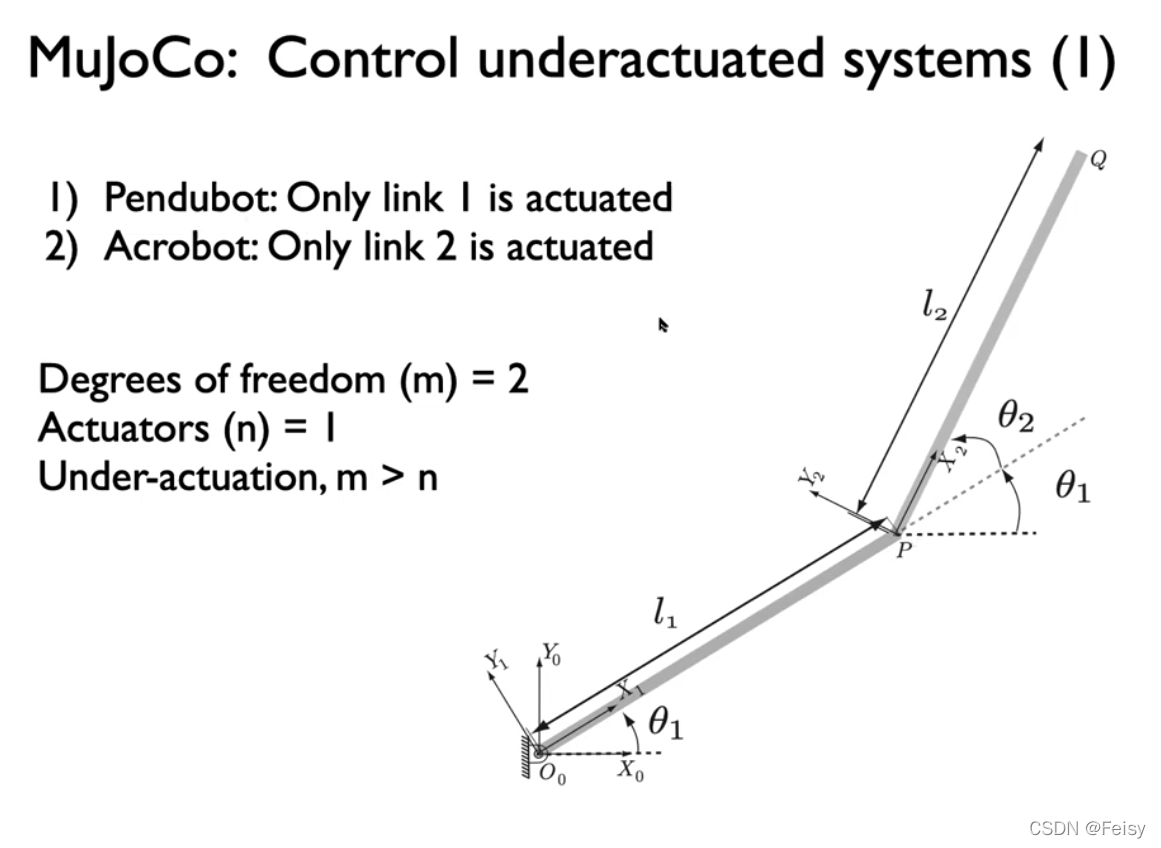
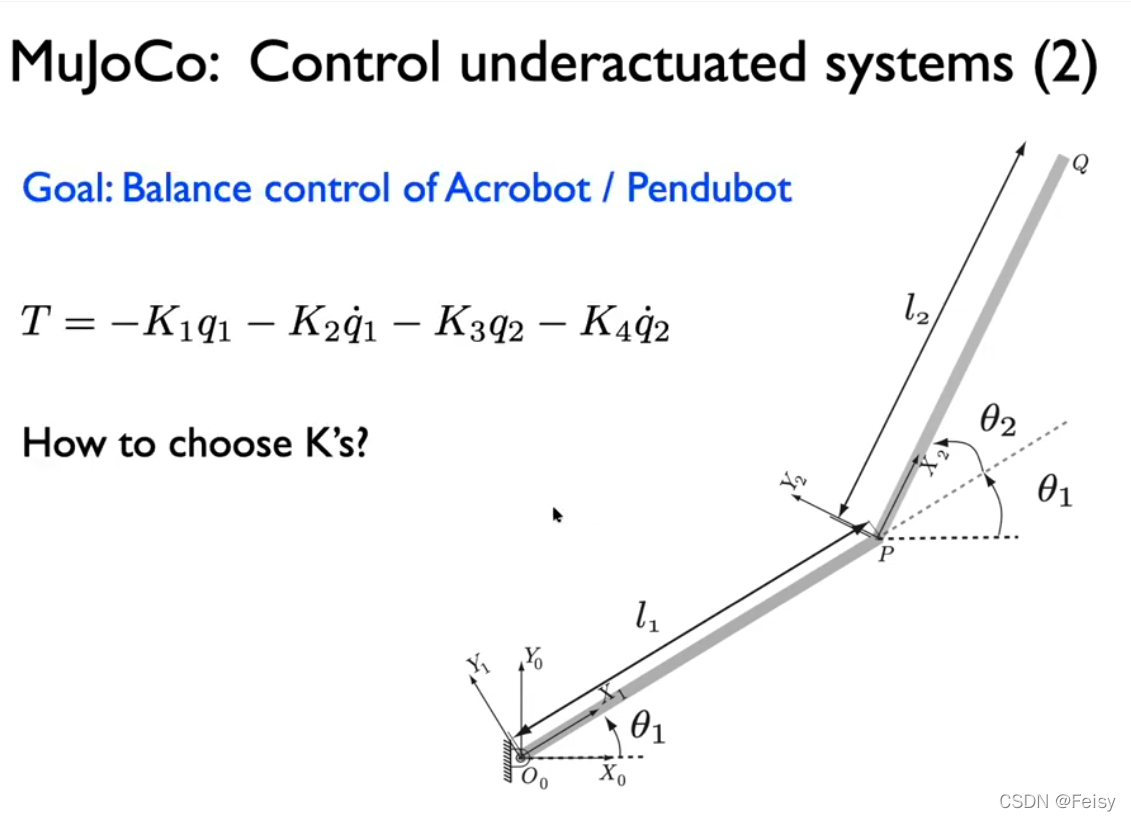
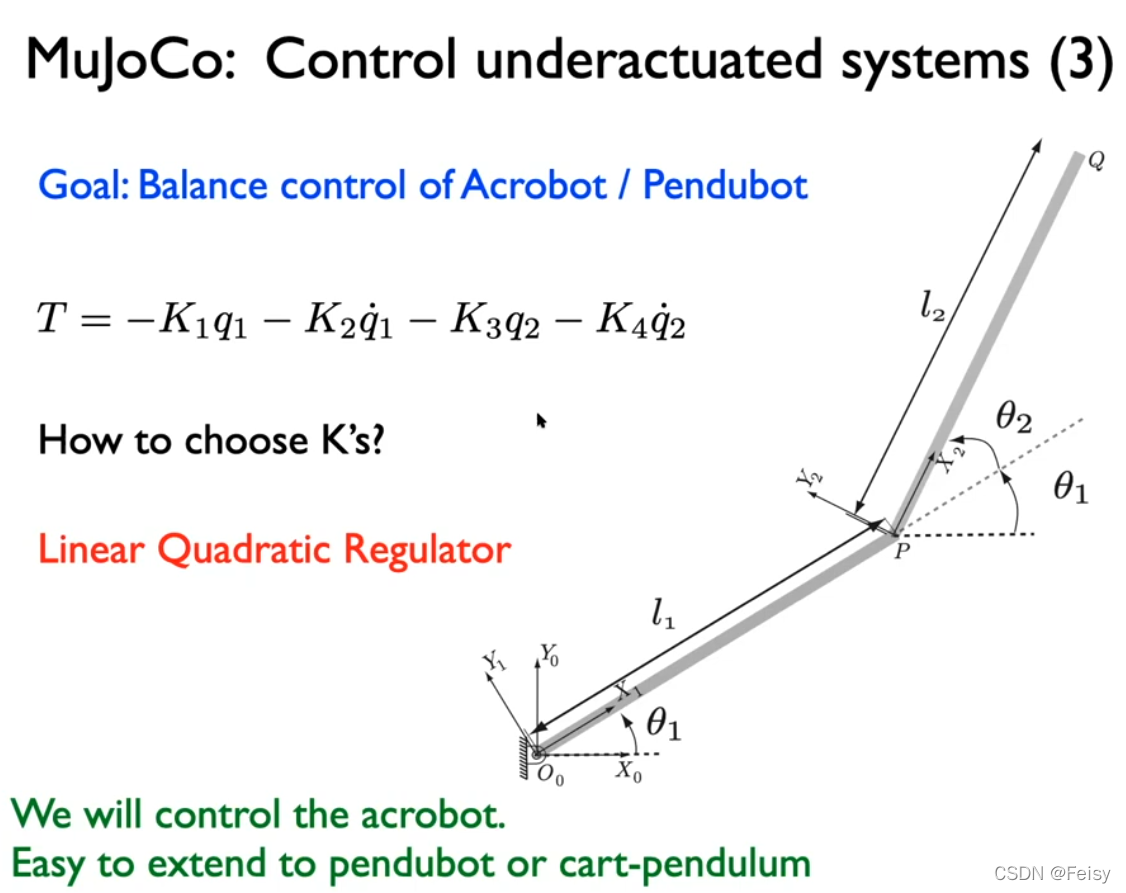
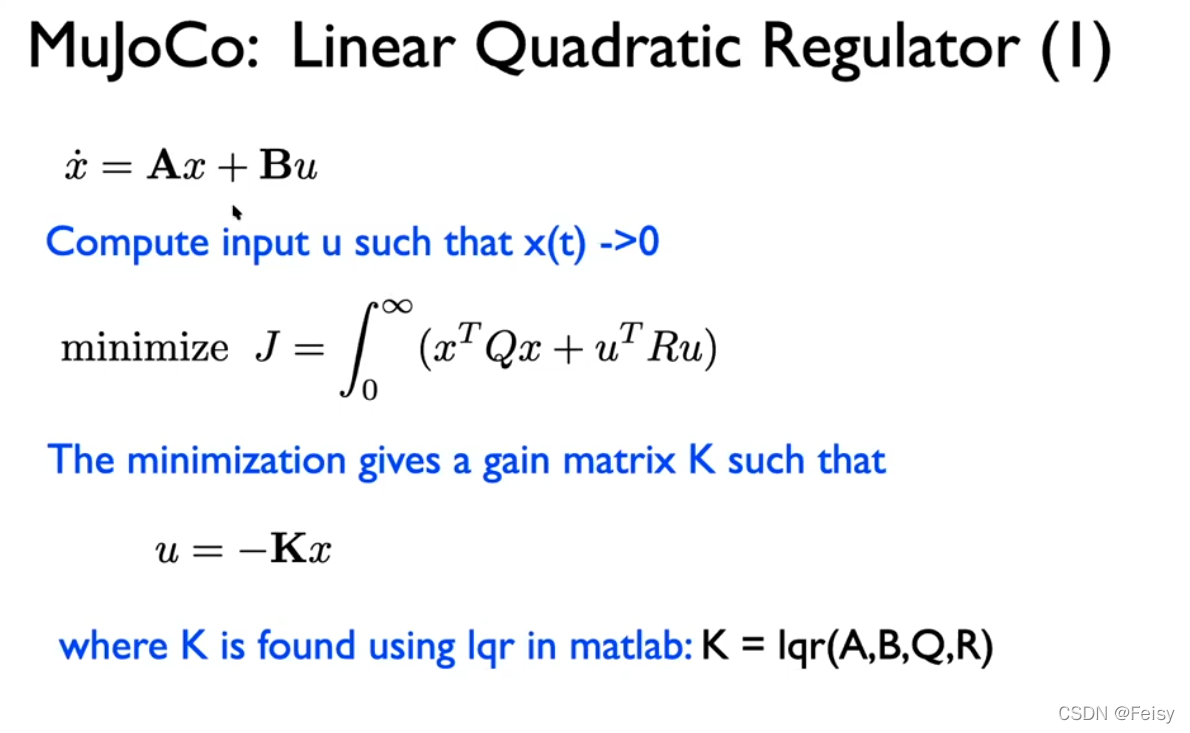
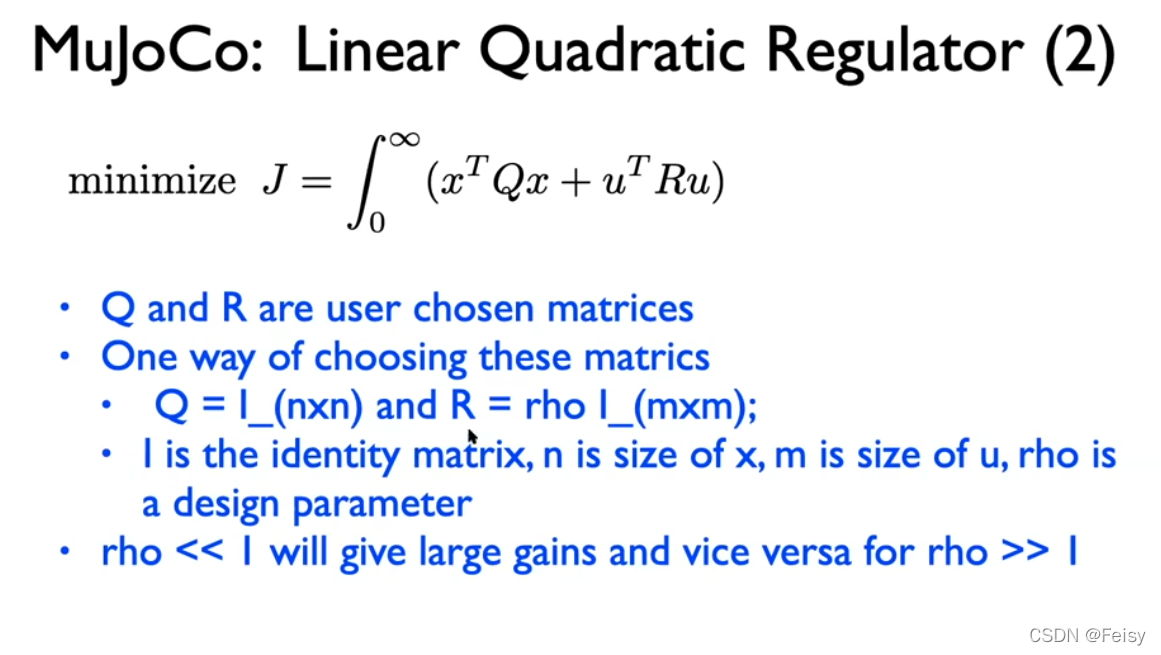
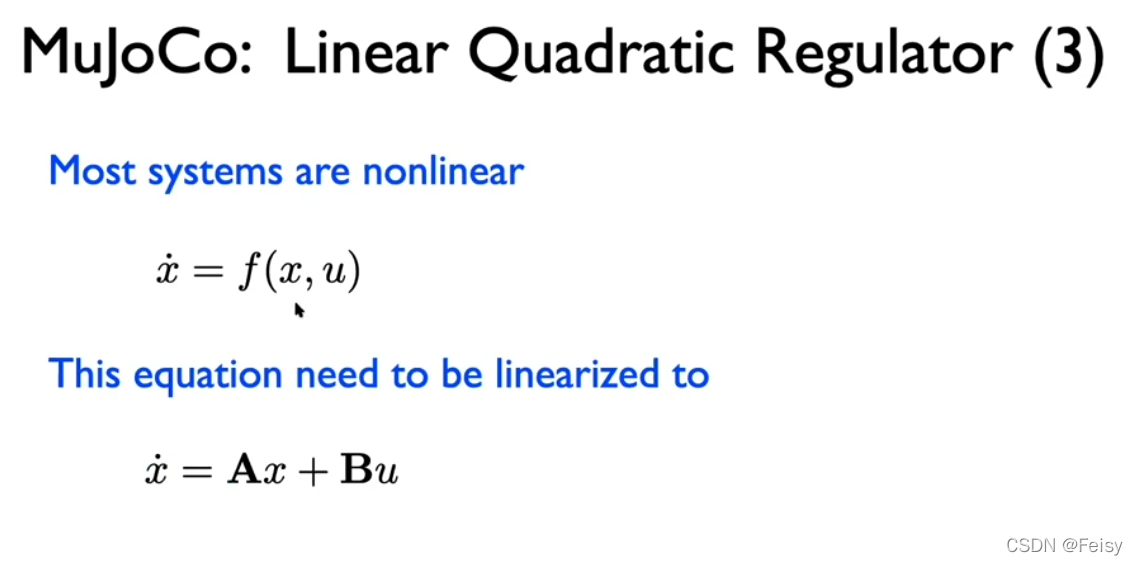
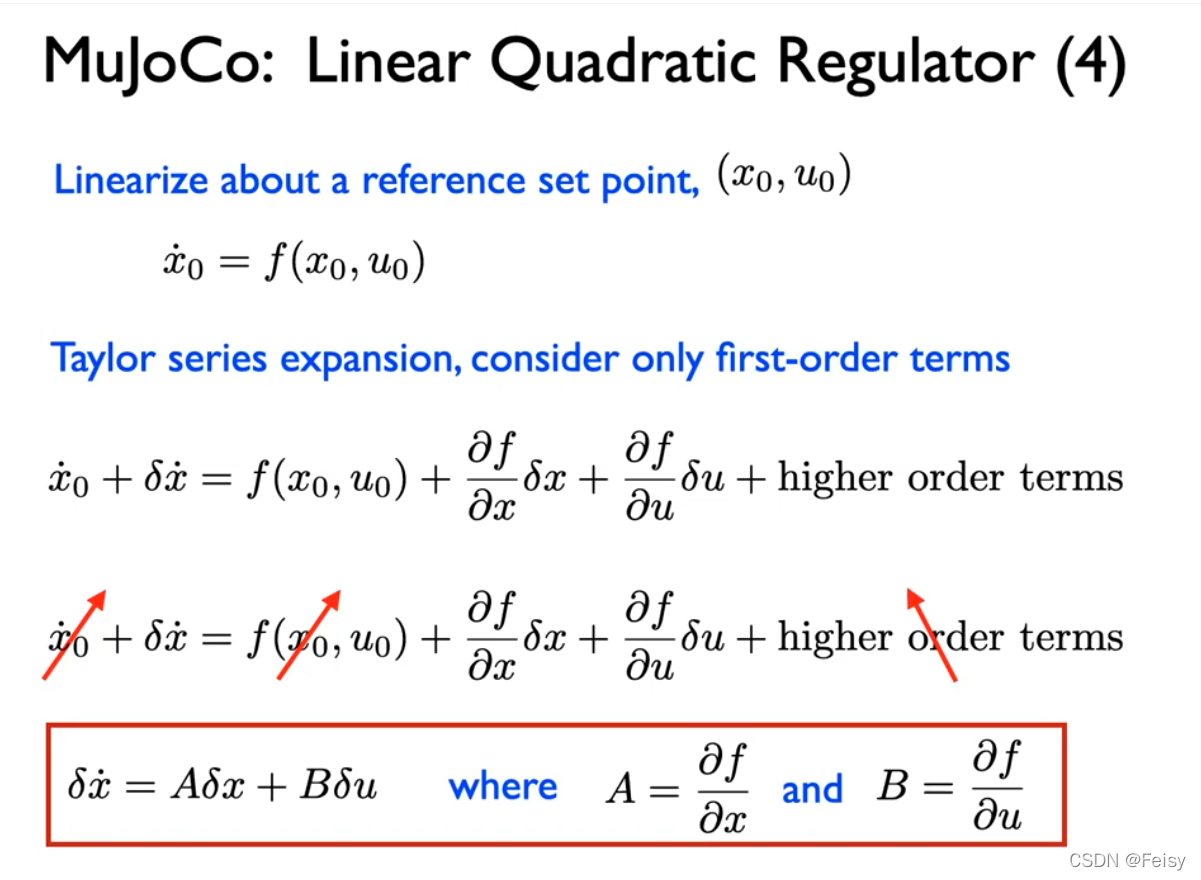
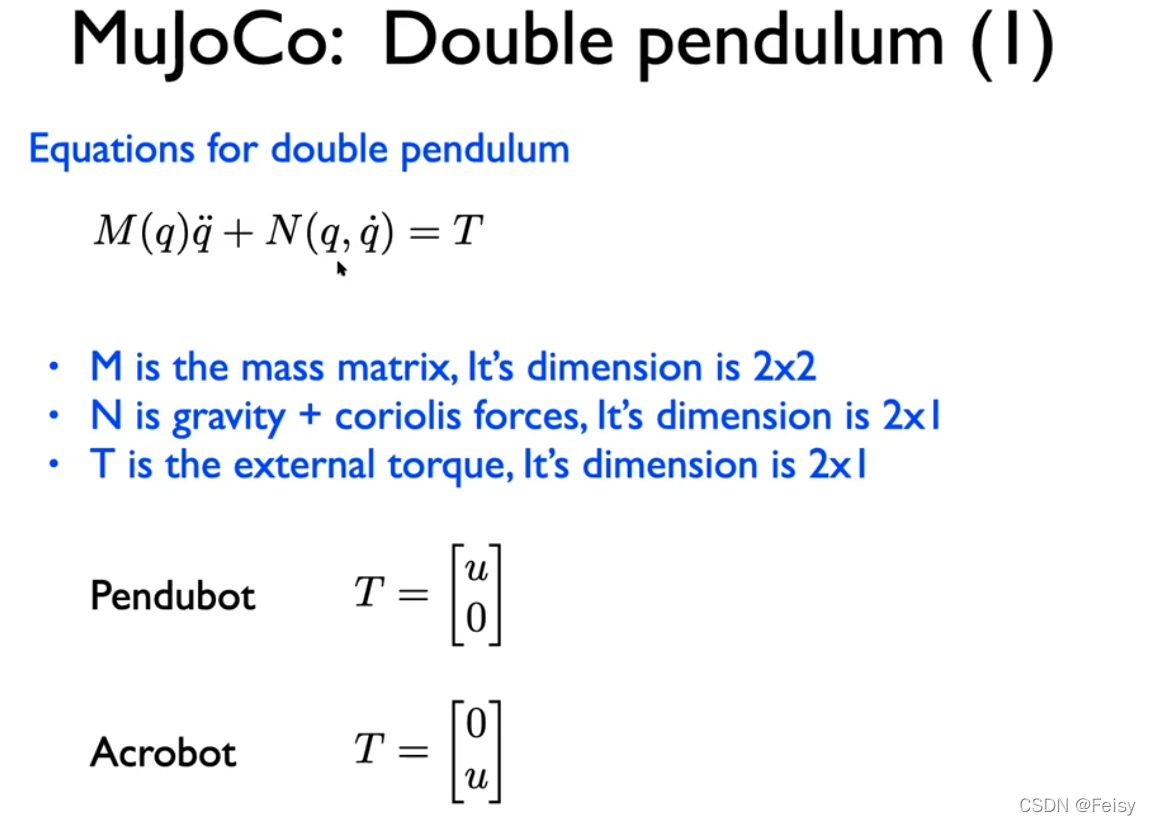
MuJoCo Lec7
void f(const mjModel* m, mjData* d,double input[5], double output[4])
{
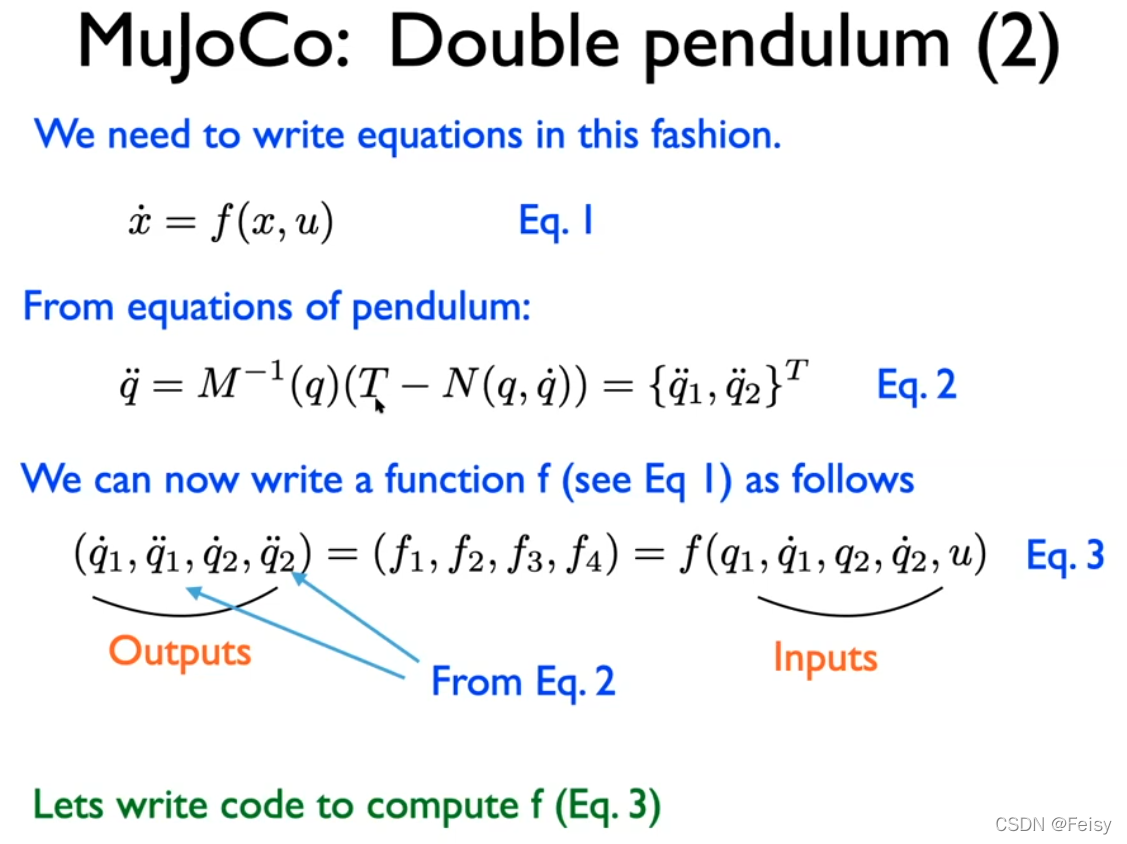
//state = q1, q1dot, q2, q2dot
//inputs = q1, q1dot, q2, q2dot, u
//outputs = q1dot, q1ddot, q2dot, q2ddot
d->qpos[0] = input[0];
d->qvel[0] = input[1];
d->qpos[1] = input[2];
d->qvel[1] = input[3];
d->ctrl[0] = input[4];
//Forward dynamics: same as mj_step but do not integrate in time.
mj_forward(m,d);
double q1dot, q2dot;
q1dot = d->qvel[0];
q2dot = d->qvel[1];
//Equation of motion
//M*qacc + qfrc_bias = ctrl
//qacc = inv(M)*(ctrl-qfrc_bias) = q1ddot, q2ddot
int i;
const int nv = 2;
double M[nv*nv] = {
0};
mj_fullM(m,M,d->qM);
//M = {M[0] M[1]; M[2] M[3]}
double det_M = M[0]*M[3] - M[1]*M[2];
double Minv[] = {
M[3],-M[1],-M[2],M[0]};
for (i=0;i<4;i++)
Minv[i] = Minv[i]/det_M;
//printf("%f %f %f %f \n",M[0],M[1],M[2],M[3]);
double qacc[nv]={
0};
double f[nv]={
0};
//f = (ctrl-qfrc_bias)
f[0] = 0-d->qfrc_bias[0]; //no ctrl because there is no control on link 1
f[1] = d->ctrl[0]-d->qfrc_bias[1];
//printf("%f %f \n",f[0],f[1]);
//qacc = inv(M)*(ctrl-qfrc_bias)
mju_mulMatVec(qacc,Minv,f,2,2);
double q1ddot = qacc[0];
double q2ddot = qacc[1];
output[0] = q1dot;
output[1] = q1ddot;
output[2] = q2dot;
output[3] = q2ddot;
}
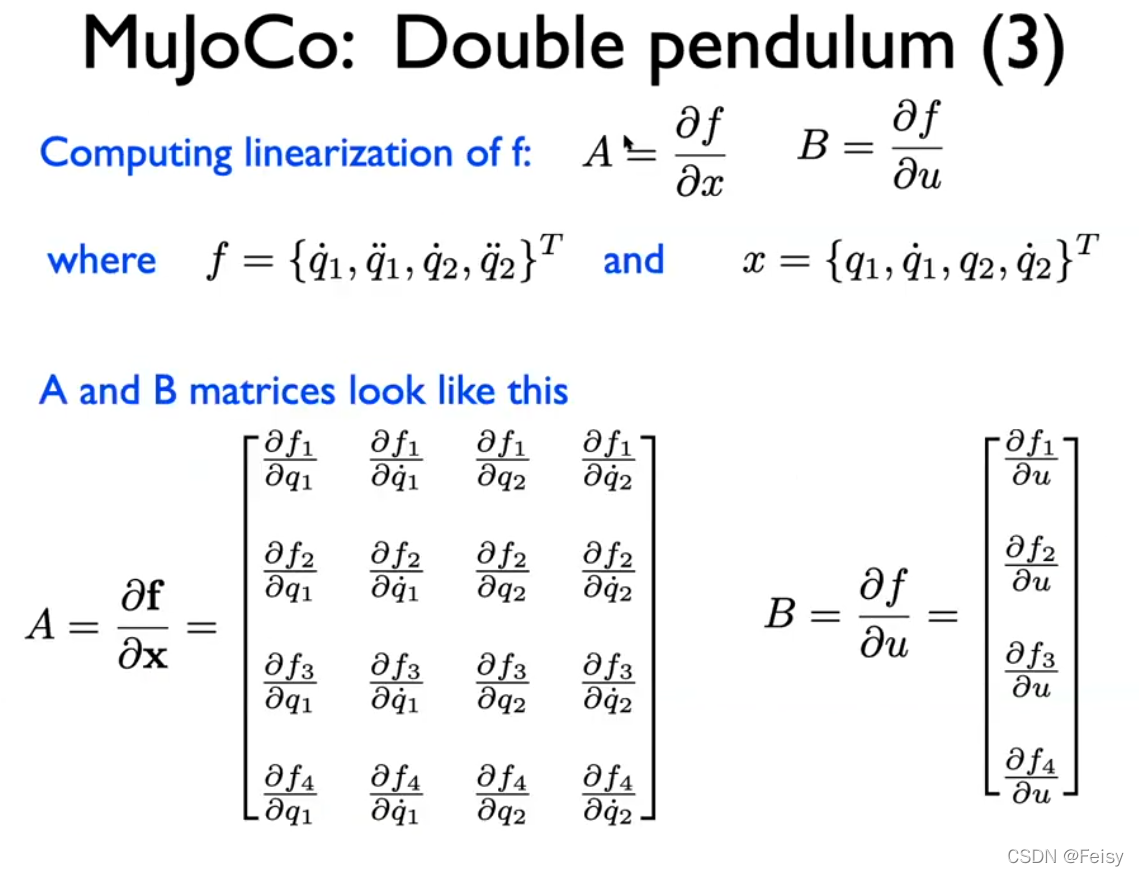
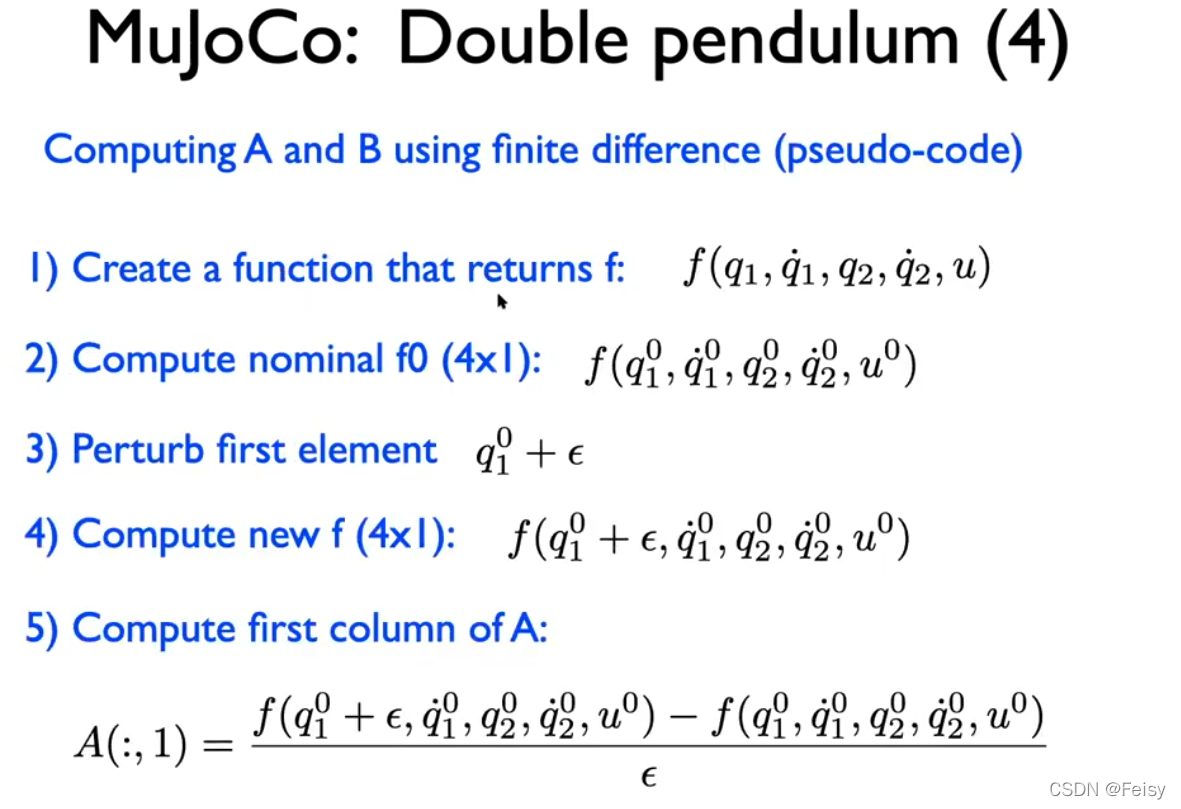
A矩阵,通过给q一个微小的干扰,然后运动5的公式得到
A有四列,所以这里重复了四次
int i,j;
double input[5]={
0};
double output[4]={
0};
double pert = 0.001;
//input[0] = 0.1;
//input[1] = 0.1;
//input[4] = 0.1;
double f0[4] = {
0};
f(m,d,input,output);
//printf("%f %f %f %f \n",output[0],output[1],output[2],output[3]);
for (i=0;i<4;i++)
f0[i] = output[i];
double A[4][4]={
0};
j = 0;
for (i=0;i<5;i++)
input[i]=0;
input[j] = pert;
f(m,d,input,output);
//因为是q1发生变化,所以,我们求的是f对q1的导数,这种思想其实
//是微分的数值化计算
for (i=0;i<4;i++)
A[i][j] = (output[i]-f0[i])/pert;
j = 1;
for (i=0;i<5;i++)
input[i]=0;
input[j] = pert;
f(m,d,input,output);
for (i=0;i<4;i++)
A[i][j] = (output[i]-f0[i])/pert;
j = 2;
for (i=0;i<5;i++)
input[i]=0;
input[j] = pert;
f(m,d,input,output);
for (i=0;i<4;i++)
A[i][j] = (output[i]-f0[i])/pert;
j = 3;
for (i=0;i<5;i++)
input[i]=0;
input[j] = pert;
f(m,d,input,output);
for (i=0;i<4;i++)
A[i][j] = (output[i]-f0 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3235
3235

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









