



在看完古月居的moveit教程后 ,由于ros版本不同,很多需要自己摸索
1. 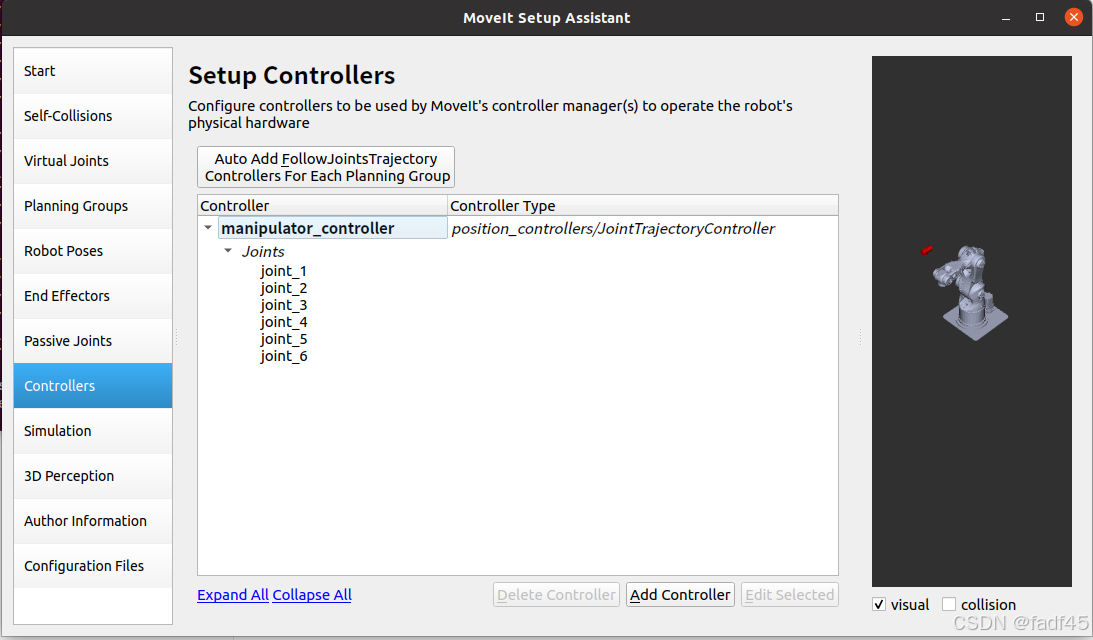 配置里别忘了添加controllers
配置里别忘了添加controllers
f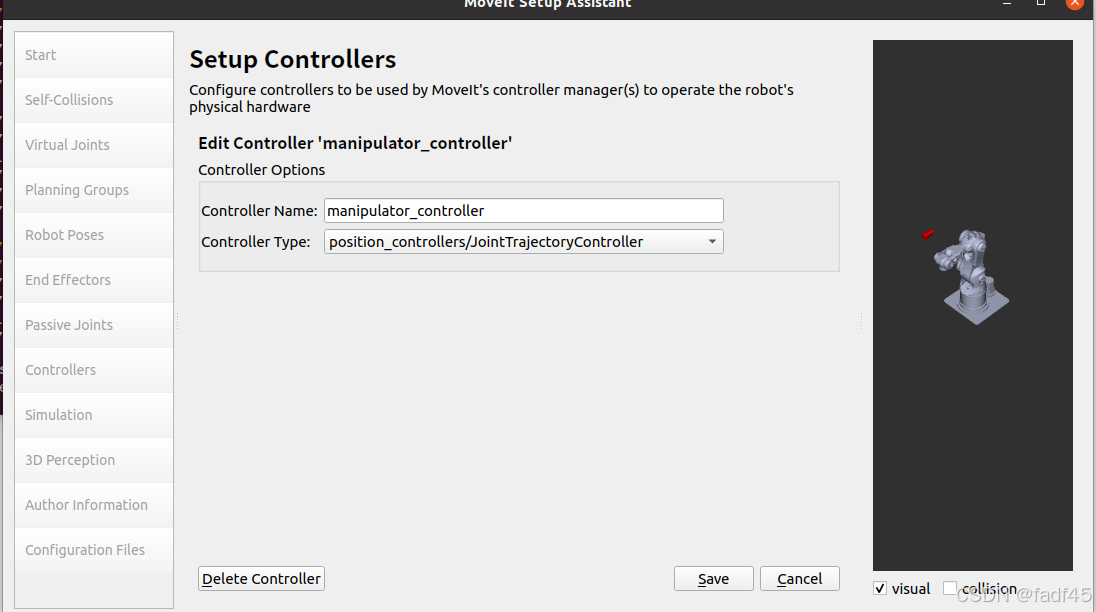 选择position_controllers
选择position_controllers
2. 在生成文件后,我的叫moveit_config
需要将moveit_config/config/gazebo_probot_anno.urdf(名字不一定相同,肯定是个urdf文件,这个是demo_gazebo.launch要读取的,下面图片在文件最后边,是配置控制器的
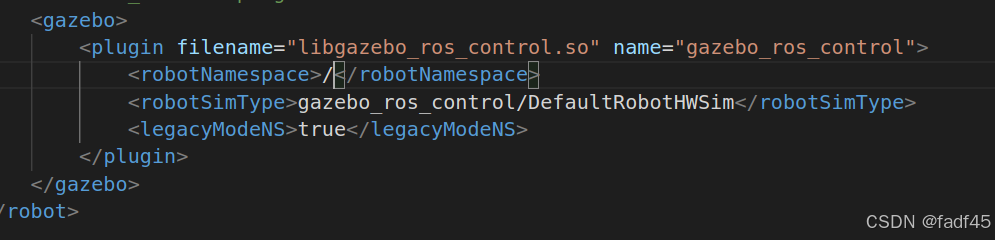
在光标所在的位置,原来是有你的机器人名字的,给它删掉,这是因为在ros_control.launch 中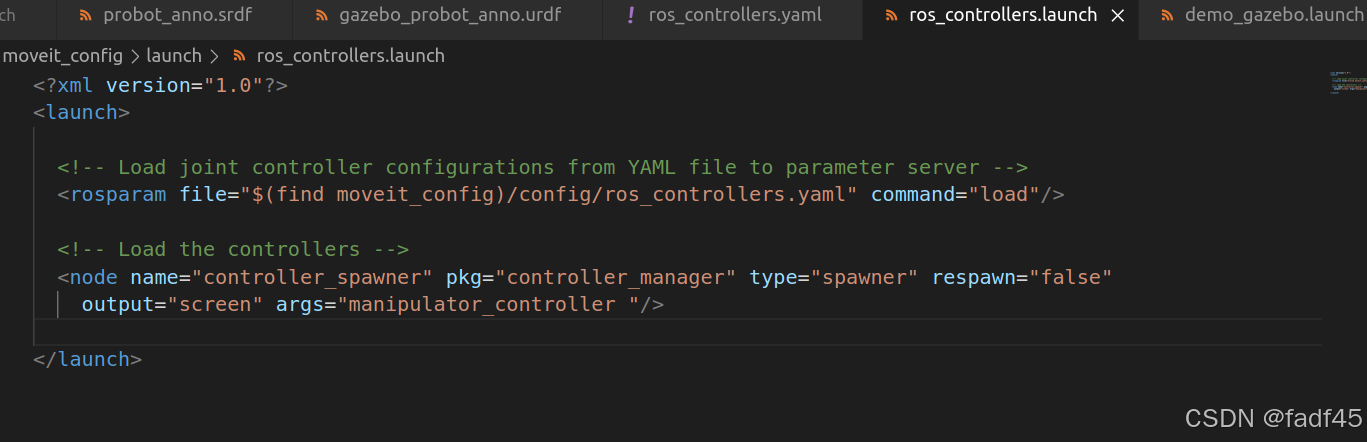
在controller_manager 中并没有给出namespace
3.在moveit_config/launch/demo_gazebo.launch中最后边
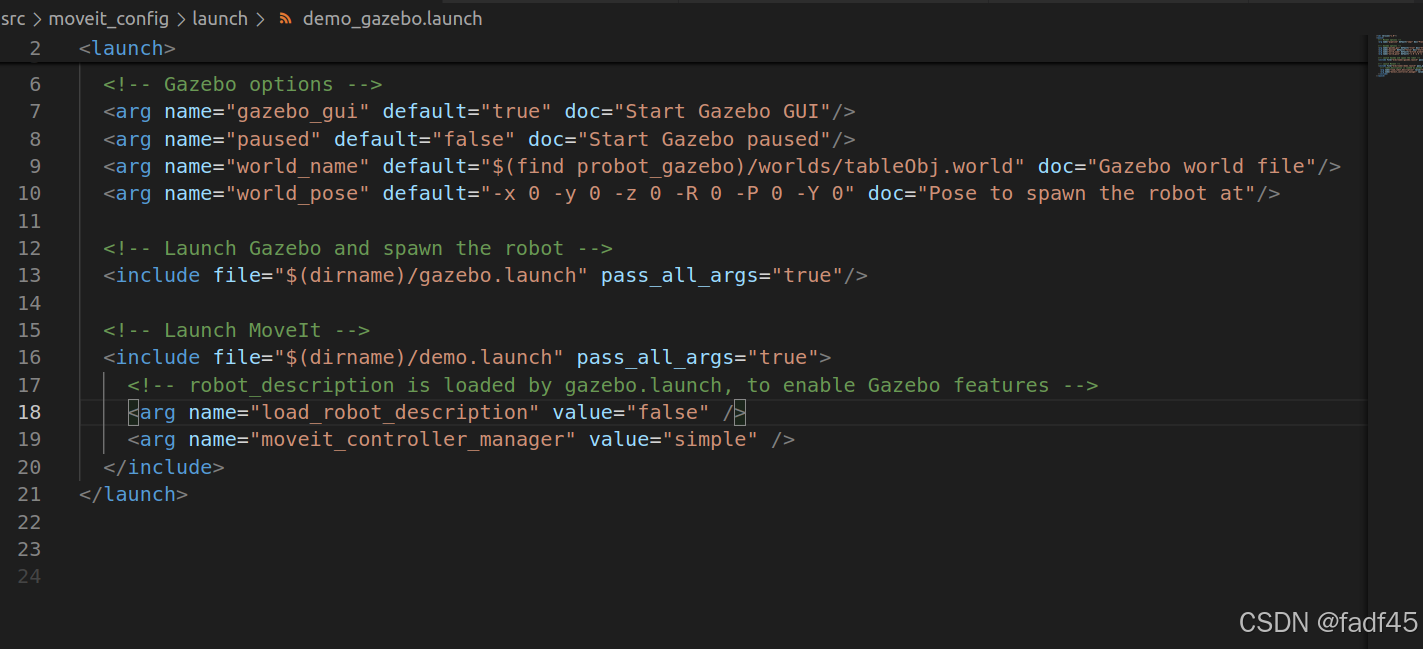
在<arg name="moveit_controller_manager" value="simple" /> 这里的value ,我的自己生成的原本写的是ros_control ,但是我将整个配置文件看了一遍后发现,要是写ros_control的话,会少包含一个FollowJointControllers,也就是视频里讲的三个接口里边的一个,将这个改成simple后就可以全部包含了
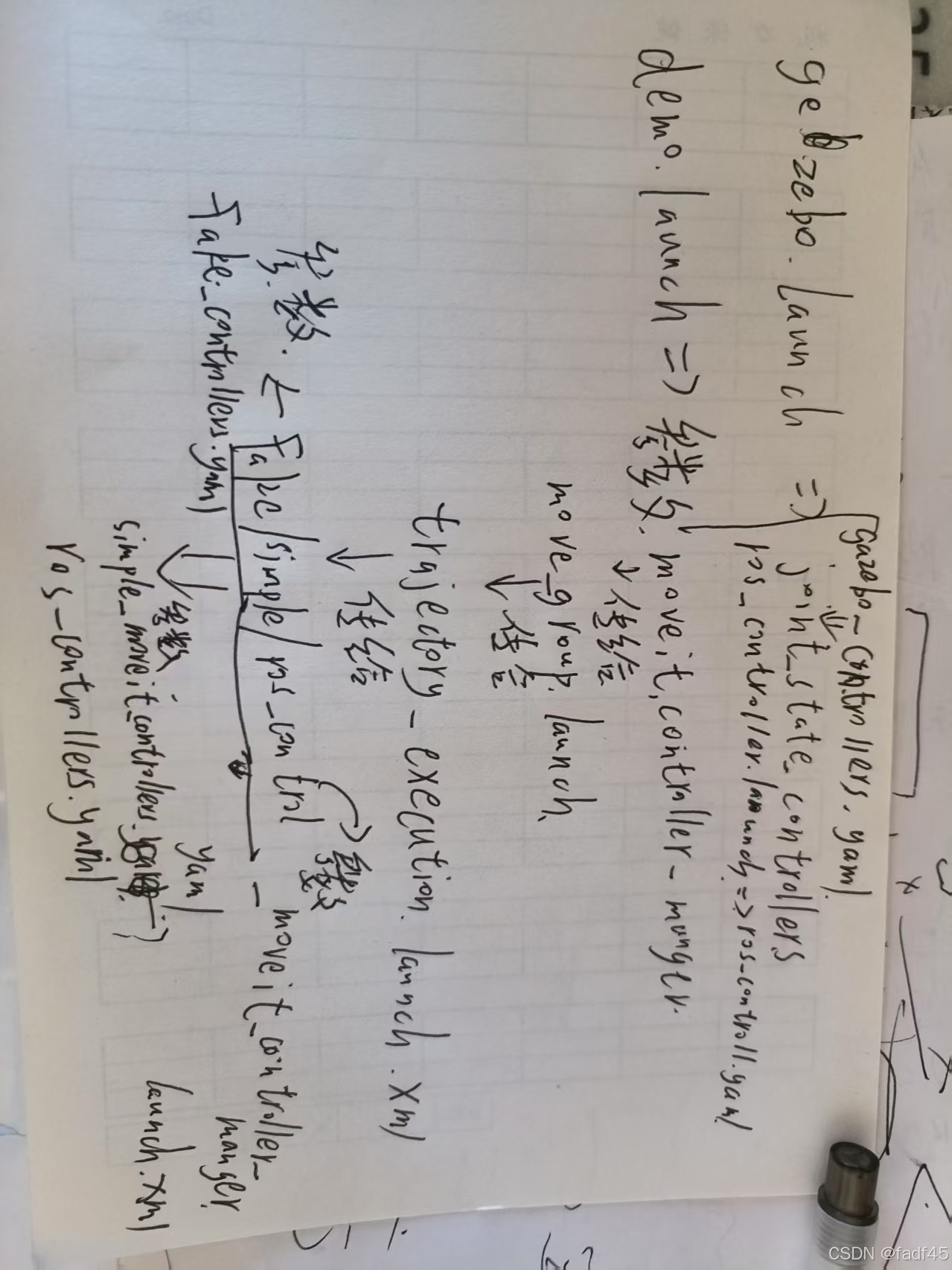
这是部分关系图

















 604
604



 到【灌水乐园】发言
到【灌水乐园】发言







