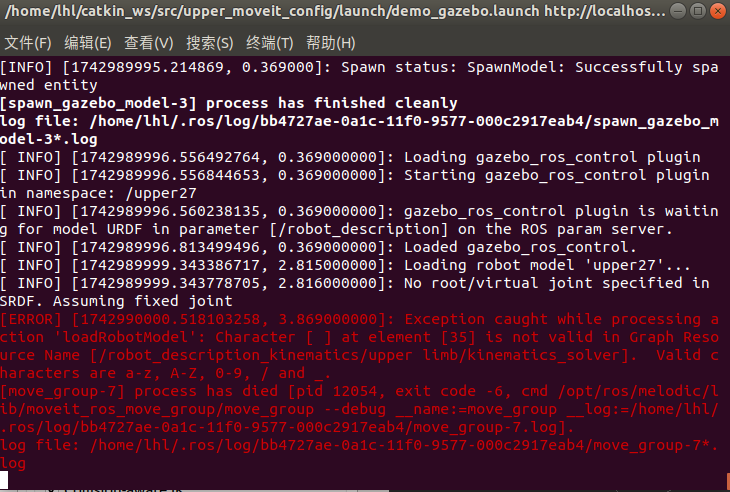
终端报错 错误原因:在配置movietde的规划组的名字格式错误。我设置的是格式是 A B,这个设置中间有空格。正确是设置下划线,即A_B或AB。 解决办法:在之前moviet生成的配置文件下,修改xx.srdf文件的group name=xx,为正确格式即可。




 1757
7590
7316
1757
7590
7316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























