




 本文详细介绍了如何在ROS中准备urdf模型,编写包含joint_state_publisher和robot_state_publisher的launch文件,并实现路径点发布,以控制机械臂运动。最后展示了相关节点与图形的结果。
本文详细介绍了如何在ROS中准备urdf模型,编写包含joint_state_publisher和robot_state_publisher的launch文件,并实现路径点发布,以控制机械臂运动。最后展示了相关节点与图形的结果。
一、准备的东西
一个机械臂的urdf
规划的路径点
二、launch文件的撰写
1.初始化
<?xml version="1.0" encoding="utf-8"?>
<launch>
<param name="robot_description" textfile="机械臂.urdf" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="rviz" pkg="rviz" type="rviz"
args="机械臂.rviz"
required="true" />
</launch>
2.加入自己路径点发布节点后的launch文件
(去除joint_state_publisher即可)
rqt_graph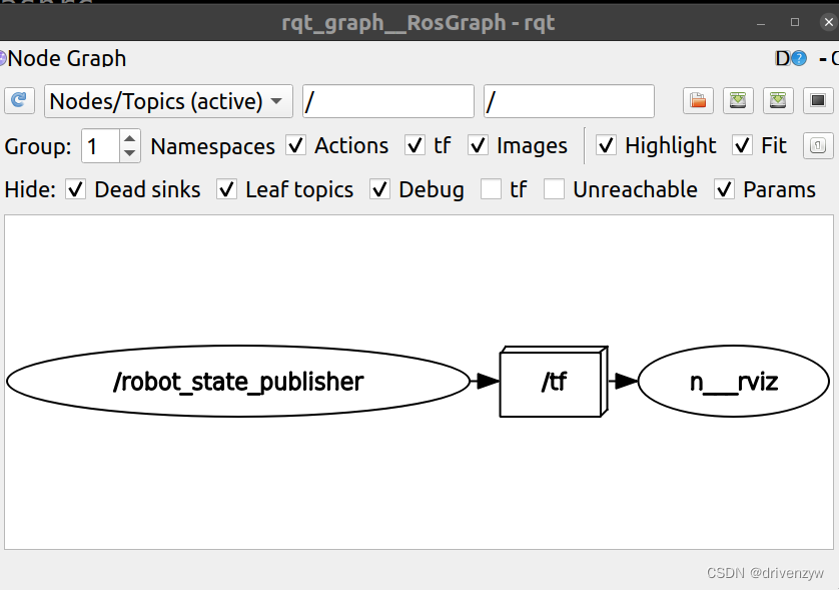
<?xml version="1.0" encoding="utf-8"?>
<launch>
<param name="robot_description" textfile="机械臂.urdf" />
<node name="robot_state_publisher" pkg="rob 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 622
622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









