



 本文介绍了在ROS环境中使用rviz、下载功能包、配置moveit的过程,包括launch文件路径问题的解决,以及moveitsetupassistant的配置步骤。着重讲述了moveit配置和常见报错的处理方法。
本文介绍了在ROS环境中使用rviz、下载功能包、配置moveit的过程,包括launch文件路径问题的解决,以及moveitsetupassistant的配置步骤。着重讲述了moveit配置和常见报错的处理方法。
一、打开rviz
roscore
rosrun rviz rviz
二、下载师兄的功能包到工作空间/src
catkin_make
source develop/setup.bash
roslaunch 功能包 XXX.launch三、报错解决

launch文件的路径问题,解决了就行
四、moveit配置
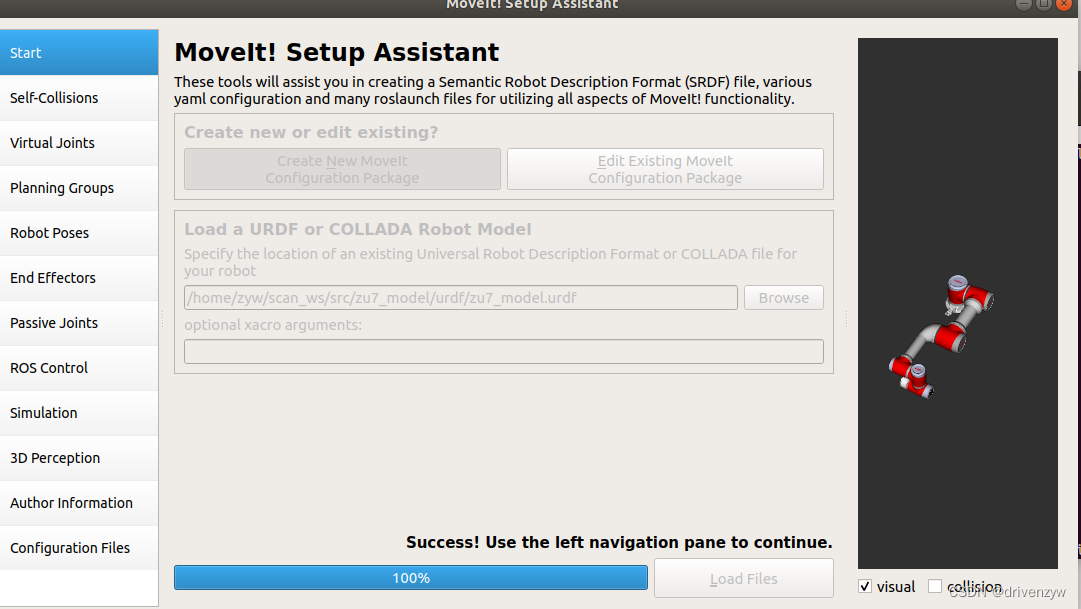
1.打开moveit配置界面
roslaunch moveit_setup_assistant setup_assistant.launch 2.选择urdf文件然后开始配置
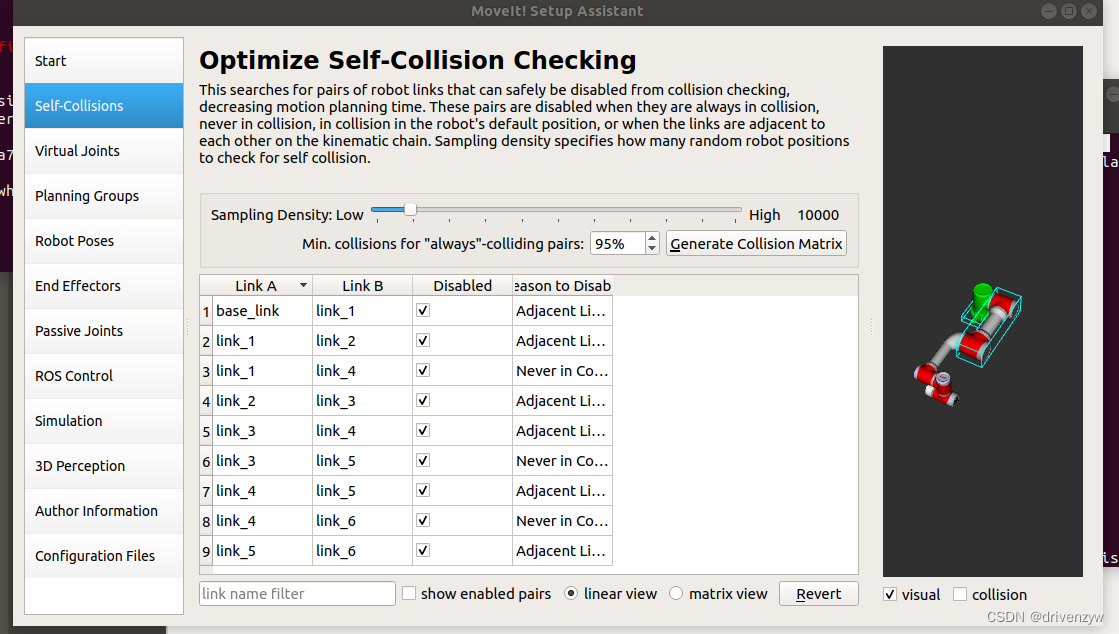
3.自碰撞检测维持原设置就行
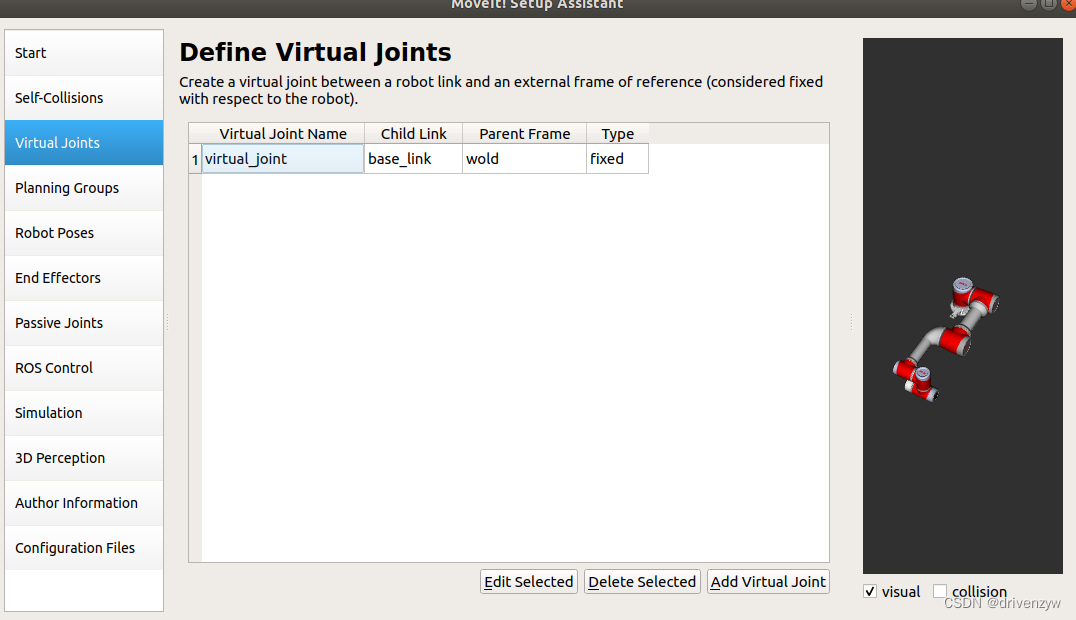
4.固定基坐标系
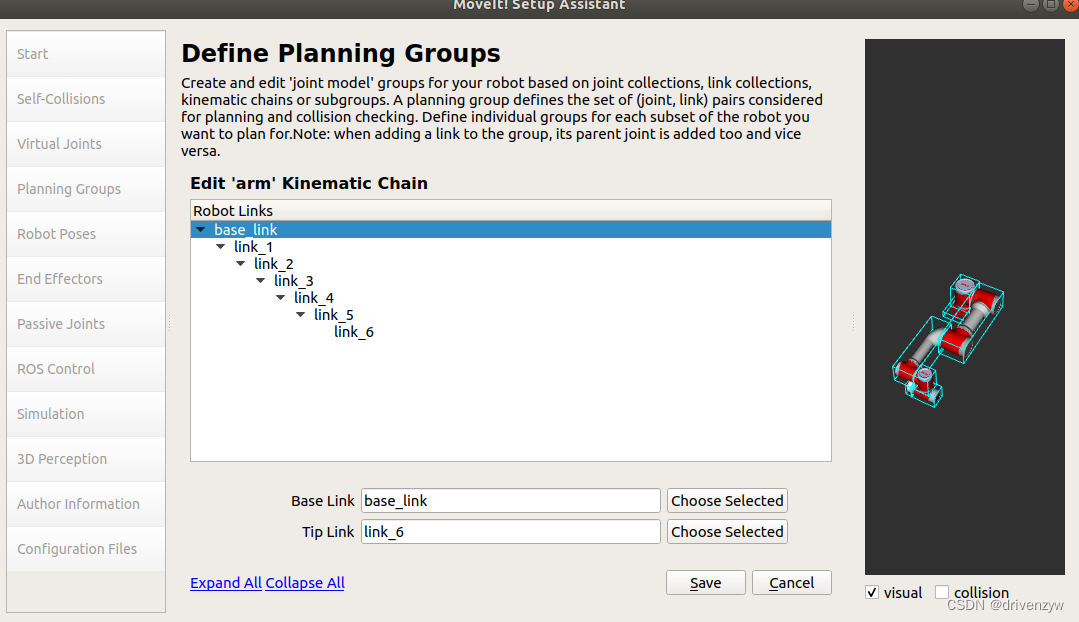
5.planning groups
6、写作者的名字和邮箱然后生成功能包就可以运行了
roslaunch XXX包 demo.launch五、moveit报错

















 1062
1062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









