



工业机器人RTOS(实时操作系统)架构图
这个图表将展示RTOS的核心组件、任务调度、内存管理以及与硬件层的交互关系。
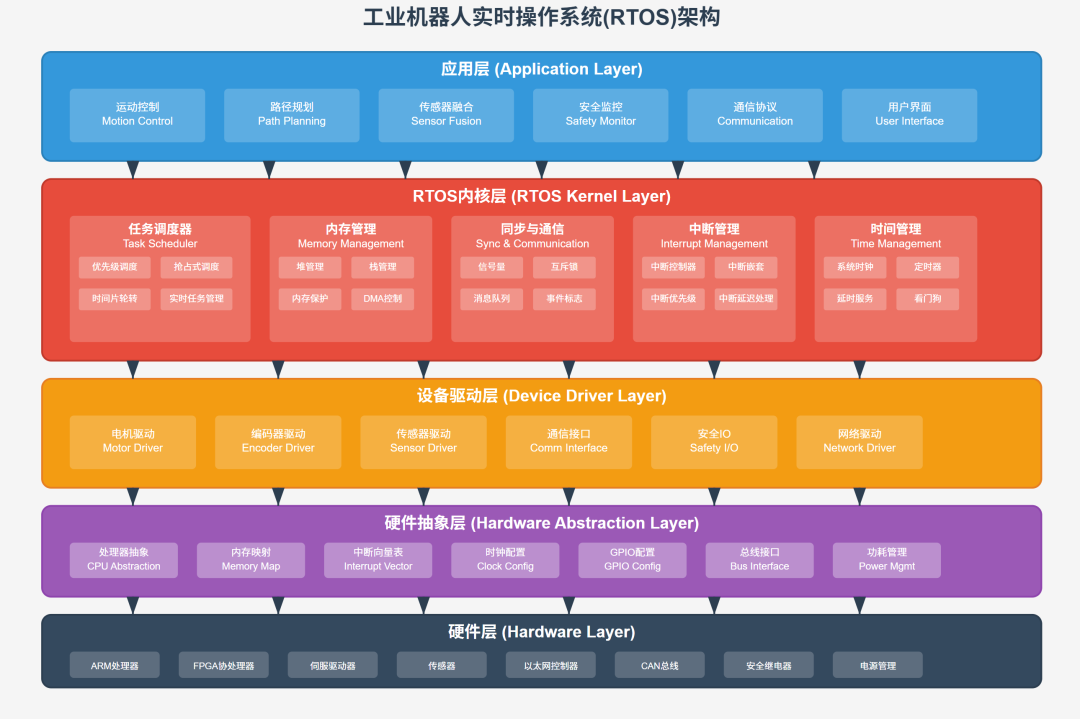
这个架构图展示了工业机器人RTOS的四个主要层次,每一层都有其独特的功能和职责。
应用层(蓝色) 是系统的最高层,包含了机器人的核心功能模块。运动控制负责机器人关节和末端执行器的精确运动,路径规划模块计算机器人从起点到终点的最优路径。传感器融合将来自多个传感器的数据整合,为机器人提供准确的环境感知。安全监控模块确保机器人在各种情况下都能安全运行,通信协议处理与外部系统的数据交换,用户界面则提供人机交互功能。
RTOS内核层(红色) 是整个系统的核心,负责系统资源的管理和协调。任务调度器采用优先级调度和抢占式调度机制,确保高优先级的实时任务能够及时执行。内存管理模块负责堆栈管理、内存保护和DMA控制,确保系统内存的高效利用。同步与通信模块提供信号量、互斥锁、消息队列等机制,保证任务间的协调运行。中断管理处理各种硬件中断,支持中断嵌套和优先级管理。时间管理模块维护系统时钟,提供定时器服务和看门狗功能。
设备驱动层(橙色) 作为软件和硬件之间的桥梁,为上层应用提供标准化的硬件访问接口。电机驱动控制各关节的伺服电机,编码器驱动读取位置反馈信息,传感器驱动处理各种传感器数据,通信接口管理串口、以太网等通信协议,安全IO处理紧急停止和安全门等安全相关信号,网络驱动支持工业以太网通信。
硬件抽象层(紫色) 隐藏了具体硬件平台的差异,为上层软件提供统一的硬件接口。它包括处理器抽象、内存映射、中断向量表配置、系统时钟配置、GPIO配置、总线接口管理和功耗管理等功能。
硬件层(深灰色) 是整个系统的基础,包含ARM处理器、FPGA协处理器、伺服驱动器、各种传感器、以太网控制器、CAN总线、安全继电器和电源管理等物理硬件组件。
这种分层架构的优势在于各层之间职责清晰,上层不需要了解下层的具体实现细节,下层为上层提供标准化的服务接口。这样的设计使得系统具有良好的可维护性、可扩展性和可移植性,非常适合工业机器人这种对实时性、可靠性和安全性要求极高的应用场景。
实时性保障机制
确定性响应时间:RTOS内核采用抢占式调度算法,确保高优先级任务能够在预定时间内得到执行。中断延迟被严格控制在微秒级别,满足工业机器人对精确时序的要求。
优先级继承协议:当低优先级任务持有高优先级任务所需的资源时,系统会临时提升低优先级任务的优先级,避免优先级倒置问题。
安全性与可靠性
内存保护机制:硬件抽象层配置内存管理单元(MMU),为不同任务分配独立的内存空间,防止任务间的相互干扰。
看门狗监控:系统集成多级看门狗机制,包括硬件看门狗和软件看门狗,能够检测系统死锁和任务异常,并触发安全复位。
故障容错设计:关键任务采用冗余设计,当主任务出现故障时,备份任务能够快速接管,确保机器人的连续运行。
通信与网络支持
多协议支持:系统支持EtherCAT、Profinet、Modbus等多种工业通信协议,能够与不同厂商的设备无缝集成。
实时网络栈:专门针对实时通信优化的网络协议栈,保证网络通信的确定性和低延迟。
开发与调试工具
实时跟踪分析:系统提供任务执行时间分析、中断响应时间测量、内存使用情况监控等调试工具,帮助开发者优化系统性能。
在线诊断:支持系统运行时的状态监控和参数调整,无需停机即可进行系统维护和优化。
可扩展性设计
模块化架构:各个功能模块相对独立,可以根据不同机器人型号的需求进行裁剪或扩展。
标准化接口:采用标准的API接口,便于第三方软件的集成和定制化开发。
这种RTOS架构特别适合于需要高精度控制、快速响应和高可靠性的工业机器人应用,如汽车制造、电子装配、精密加工等领域。通过合理的分层设计和实时调度机制,确保机器人能够在复杂的工业环境中稳定、精确地完成各种操作任务。
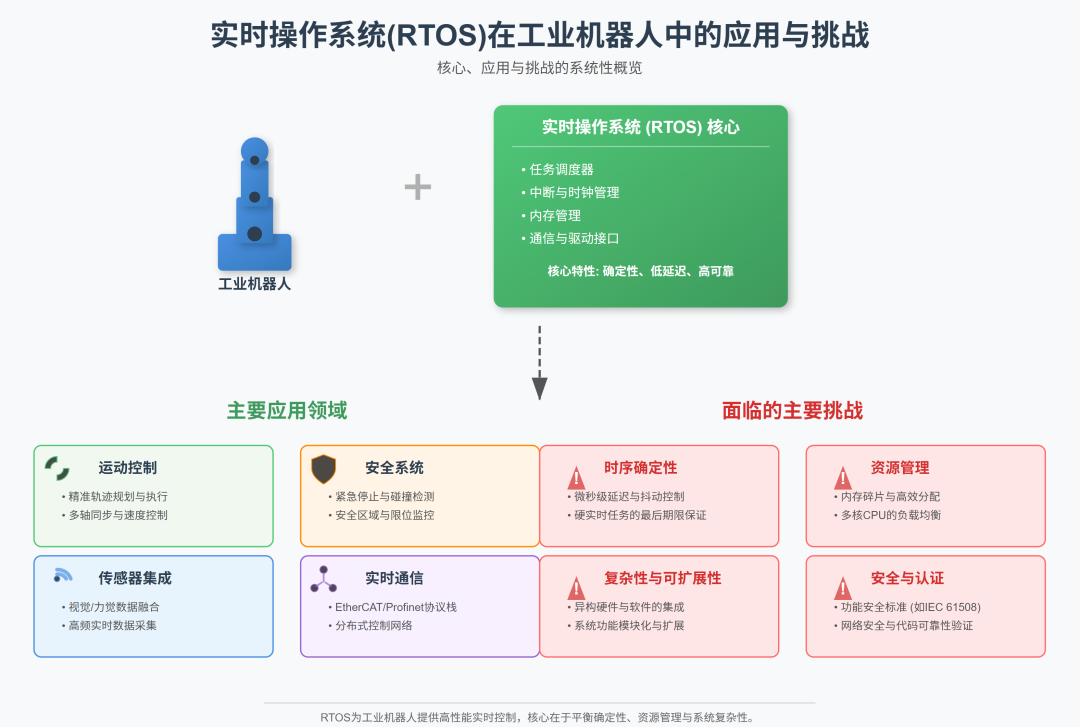
工业机器人中实时操作系统的应用与挑战
在现代工业自动化领域,工业机器人是核心支柱。其动作的精确性、重复性和可靠性直接影响着生产效率与产品质量。这一切的背后,实时操作系统 (Real-Time Operating System, RTOS) 扮演着至关重要的角色,它如同机器人的“小脑”,确保每一个指令都能在严格的时间限制内得到响应和执行。然而,随着机器人智能化、网络化程度的不断加深,RTOS在应用中也面临着诸多新的挑战。
实时操作系统在工业机器人中的核心应用 (Core Applications of RTOS in Industrial Robots)
实时操作系统与通用操作系统(如Windows或桌面版Linux)最大的区别在于其确定性 (Determinism) 和可预测性 (Predictability)。它必须保证任务在预设的时间窗口内完成,否则可能导致生产事故。其在工业机器人中的应用主要体现在以下几个方面:
1. 高精度的运动控制 (High-Precision Motion Control)
这是RTOS在机器人中最核心、最基本的应用。机器人的运动控制是一个复杂的多任务过程,涉及:
- 轨迹规划 (Trajectory Planning):
控制器需要在几十毫秒甚至几毫秒内计算出机器人从A点到B点的最优路径,这包括关节空间 (Joint Space) 和笛卡尔空间 (Cartesian Space) 的复杂数学运算。
- 逆向运动学解算 (Inverse Kinematics):
根据期望的末端执行器位置和姿态,实时解算出每个关节应旋转的角度。这个过程涉及到大量的浮点运算,例如对于一个六轴机器人,需要求解复杂的非线性方程组。其运动学方程通常可以表示为:

- 伺服控制环 (Servo Control Loop):
RTOS以极高的频率(通常为kHz级别)运行控制循环,读取电机编码器反馈的位置和速度信息,与期望值进行比较,并通过PID等控制算法计算输出力矩或电流,驱动电机精确运动。任何微小的延迟都可能导致运动轨迹偏离和振动。
2. 实时传感器数据处理 (Real-Time Sensor Data Processing)
工业机器人通常集成了大量的传感器,如力矩传感器、视觉传感器(摄像头)、接近传感器等。RTOS负责:
- 同步数据采集:
确保来自不同传感器的数据能够被同步、确定性地采集。
- 数据融合与决策:
实时融合多源传感器信息。例如,在力控打磨应用中,RTOS需要实时处理力矩传感器的数据,并即时调整机器人的轨迹和姿态,以保持恒定的打磨力。
- 中断处理 (Interrupt Handling):
当外部事件(如安全光栅被遮挡、碰撞发生)触发中断时,RTOS能够以最快的速度响应,挂起低优先级任务,并执行相应的中断服务程序 (Interrupt Service Routine, ISR),确保机器人和人员的安全。
3. 确定性的通信 (Deterministic Communication)
在自动化生产线中,机器人需要与其他设备(如PLC、上层控制系统、其他机器人)进行协同工作。RTOS通过支持实时工业以太网协议(如EtherCAT, PROFINET IRT)来保证:
- 低延迟和低抖动:
数据包在网络中的传输时间是确定且可预测的。
- 周期性数据交换:
控制指令和状态信息能够以固定的周期进行交换,实现多设备间的精确同步。
4. 功能安全与系统监控 (Functional Safety and System Monitoring)
对于安全至关重要的应用,RTOS是实现功能安全的基础。例如,知名的RTOS如QNX和VxWorks都提供了经过安全认证(如IEC 61508)的版本。RTOS可以划分出独立、受保护的内存空间来运行安全监控任务,这些任务独立于主控制任务,实时监测机器人的状态,一旦发现异常(如电机超速、位置超差),便立即执行安全停止等故障安全 (Fail-Safe) 操作。
工业机器人中RTOS面临的挑战 (Challenges for RTOS in Industrial Robots)
随着工业4.0和人工智能技术的发展,现代工业机器人不再是孤立的执行单元,这对传统的RTOS提出了严峻的挑战。
1. 多核处理器带来的复杂性 (Complexity of Multi-Core Processors)
为了满足日益增长的计算需求(如视觉处理和AI算法),机器人控制器越来越多地采用多核CPU。这给RTOS带来了新的挑战:
- 任务分配与负载均衡 (Task Allocation & Load Balancing):
如何将实时任务和非实时任务高效地分配到不同核心上,并保证实时任务的确定性不受影响,是一个复杂的问题。非对称多处理 (Asymmetric Multiprocessing, AMP) 和对称多处理 (Symmetric Multiprocessing, SMP) 是两种常见架构,但都面临着资源竞争和缓存一致性 (Cache Coherency) 的难题。
- 核间通信与同步 (Inter-Core Communication & Synchronization):
多核间的任务需要高效、低延迟的通信机制,同时必须避免死锁 (Deadlock) 和优先级反转 (Priority Inversion) 等问题。
2. 人工智能与机器学习的融合 (Integration of AI and Machine Learning)
将AI/ML模型(如用于物体识别的深度神经网络)集成到机器人控制环中,是实现智能化操作的关键。然而:
- 计算的非确定性:
AI模型的推理时间可能不是固定的,这与硬实时 (Hard Real-Time) 系统的要求相悖。如何在保证控制环路确定性的前提下,利用AI的“软实时” (Soft Real-Time) 结果,是一个核心挑战。
- 资源抢占:
AI运算通常是计算密集型的,可能会抢占CPU资源,影响关键的运动控制任务。解决方案之一是使用虚拟机管理程序 (Hypervisor),将系统划分为一个运行硬实时RTOS的关键分区和一个运行通用OS(如Linux)的非关键分区,后者负责运行AI应用,两者通过严格定义的接口通信。
3.日益严峻的网络安全威胁 (Growing Cybersecurity Threats)
联网的工业机器人可能成为网络攻击的目标。攻击者可能通过网络侵入,篡改程序、窃取数据,甚至造成物理世界的破坏。
- RTOS的轻量化特性:
传统RTOS为追求性能和低开销,通常安全防护能力较弱。
- 安全加固的挑战:
在RTOS中增加复杂的安全功能(如安全启动、加密、访问控制)会增加系统开销,并可能影响实时性能。未来的RTOS需要将安全“内建 (Built-in)”而非“附加 (Bolted-on)”。
4. 开发与调试的复杂性 (Complexity in Development and Debugging)
RTOS应用是多线程的,且对时序高度敏感,这使得调试变得异常困难。一些难以复现的错误(通常被称为“海森堡bug”,Heisenbugs)往往与任务间的时序问题有关。在多核环境下,这种复杂性更是呈指数级增长。开发者需要更先进的追踪和可视化工具来分析系统行为。
未来趋势与展望 (Future Trends and Outlook)
为应对上述挑战,工业机器人中的RTOS正在向以下方向发展:
- 混合关键性系统 (Mixed-Criticality Systems):
使用Hypervisor技术将安全关键型任务和非关键型任务隔离在同一硬件上,成为主流趋势。
- ROS 2 与 DDS 的结合:
机器人操作系统 (Robot Operating System, ROS) 的第二代ROS 2,其底层的DDS (Data Distribution Service) 通信标准提供了实时发布/订阅能力,使得ROS 2可以更好地与RTOS集成,甚至在某些实时性要求不那么严苛的场景下直接部署。
- 开源RTOS的崛起:
以Zephyr、FreeRTOS为代表的开源RTOS,因其灵活性、社区支持和低成本,在工业领域的应用逐渐增多。
- 边缘计算与AI加速:
RTOS开始原生支持边缘AI框架(如TensorFlow Lite for Microcontrollers),并更好地利用硬件AI加速器,实现实时的智能决策。
总之,实时操作系统是工业机器人实现精确、可靠、安全运行的基石。面对智能化和网络化的浪潮,RTOS正通过拥抱多核架构、融合AI技术、强化内生安全等方式不断演进,为下一代更智能、更互联的工业机器人提供坚实的系统支撑。
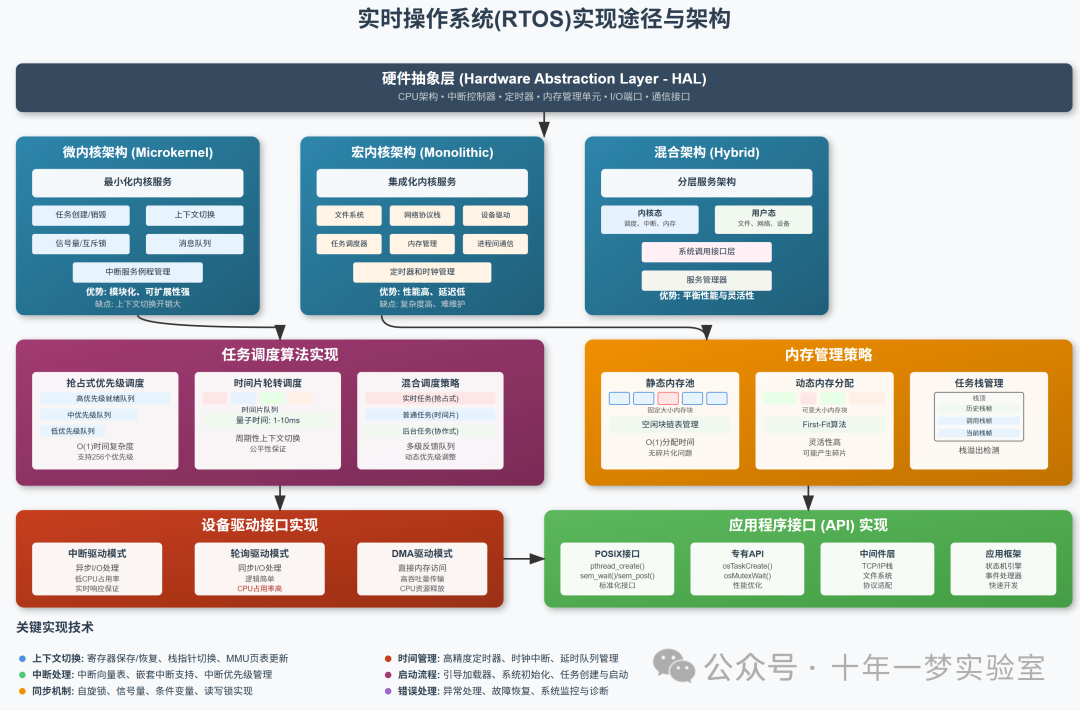
RTOS实现途径有哪些
我们来探讨一下实现实时操作系统(RTOS)的几种主要途径。
选择哪条途径通常取决于项目的具体需求,包括实时性要求(硬实时还是软实时)、开发预算、上市时间、团队的技术实力以及未来的维护策略。
以下是实现RTOS的主要途径,从最常见到最底层的方式进行排列:
实现RTOS的四种主要途径
1. 采用商用RTOS (Using a Commercial RTOS)
这是在对安全性、可靠性和性能有极高要求的领域(如航空航天、医疗设备、汽车电子和高端工业控制)最常见的选择。
- 描述 (Description):
直接向专业公司(如Wind River、BlackBerry QNX)购买成熟的RTOS产品。这些产品通常附带了完善的开发工具链、技术支持和法律保障。
- 核心特点 (Core Features):
- 高可靠性与稳定性:
经过了长时间和广泛的市场验证。
- 性能保证:
通常针对特定硬件进行了深度优化,能提供极低的延迟和抖动 (Jitter)。
- 安全与安保认证 (Safety and Security Certification):
许多商用RTOS提供了预先通过行业标准认证的版本,例如航空领域的DO-178C、汽车领域的ISO 26262、工业领域的IEC 61508。这可以极大缩短产品的认证周期。
- 专业技术支持:
遇到问题时,可以获得供应商的直接帮助。
- 丰富的中间件:
提供网络协议栈、文件系统、图形库等成熟的配套组件。
- 高可靠性与稳定性:
- 典型例子 (Examples):
- VxWorks (Wind River):
广泛应用于航空航天(例如NASA的“毅力号”火星车)、国防和工业自动化。
- QNX Neutrino (BlackBerry):
以其微内核架构和高可靠性著称,在汽车信息娱乐系统和工业控制领域占据主导地位。
- LynxOS (Lynx Software Technologies):
军事和航空领域的另一重要选择,特别强调安全性和安保性。
- VxWorks (Wind River):
- 适用场景:
对失败容忍度极低、需要行业认证、开发周期紧张且预算充足的项目。
2. 使用开源RTOS (Using an Open-Source RTOS)
随着物联网 (IoT) 和嵌入式系统的蓬勃发展,开源RTOS已成为最受欢迎的选择之一,尤其适合消费电子、物联网设备和一些成本敏感的工业应用。
- 描述 (Description):
使用遵循开源许可协议(如MIT, GPL, Apache)的RTOS。开发者可以自由地获取、修改和分发源代码。
- 核心特点 (Core Features):
- 成本效益:
无需支付高昂的许可费用,显著降低项目成本。
- 灵活性与可定制性:
可以访问全部源代码,根据具体硬件和应用需求进行深度定制和优化。
- 庞大的社区支持:
拥有活跃的开发者社区,可以通过论坛、邮件列表等方式获取帮助和学习资源。
- 生态系统丰富:
通常有大量的第三方库和驱动程序支持。
- 成本效益:
- 典型例子 (Examples):
- FreeRTOS:
目前可能是应用最广泛的开源RTOS,尤其在微控制器 (MCU) 领域。其代码轻量、易于移植。亚马逊接管后,推出了与云服务深度集成的Amazon FreeRTOS。
- Zephyr:
由Linux基金会托管,目标是成为一个安全、可扩展的RTOS,适用于资源受限的设备。它拥有强大的社区支持(包括Intel, NXP等大公司)和优秀的硬件抽象层。
- RT-Thread:
一个来自中国的开源RTOS,具有内核小、组件丰富的特点,在国内物联网领域非常流行。
- NuttX:
一个与POSIX标准高度兼容的RTOS,便于将类Unix/Linux应用移植过来。
- FreeRTOS:
- 适用场景:
成本敏感的项目、需要高度定制化的应用、物联网设备、原型开发和学术研究。
3. 基于通用OS的实时扩展 (Real-Time Extensions for General-Purpose OS)
当应用同时需要强大的非实时功能(如复杂的图形界面、网络服务)和精确的实时控制时,这种混合方式非常有用。
- 描述 (Description):
在标准的通用操作系统(主要是Linux)之上,通过打补丁或增加模块的方式,为其内核增加实时能力。
- 核心特点 (Core Features):
- 功能强大:
可以利用Linux庞大的生态系统,包括驱动程序、应用程序和开发工具。
- 兼顾两端:
在同一个系统中同时处理实时任务和非实时任务。
- 开发便利:
开发者可以使用熟悉的Linux环境和工具进行开发。
- 功能强大:
- 实现方式 (Implementation Methods):
- PREEMPT_RT补丁:
这是最主流的方式,通过对Linux内核进行修改(打上
PREEMPT_RT补丁),使其变为一个具有硬实时能力的操作系统。它将内核中原本不可中断的部分(如中断处理、自旋锁)改造为可抢占,从而大大降低延迟。 - 双内核/协处理器方法 (Dual-Kernel / Co-processor Approach):
例如Xenomai或RTAI。这种方法在Linux内核旁边运行一个独立的、微小的实时内核。实时任务由这个微内核直接管理,而非实时任务则交给Linux内核处理。两者通过特定的接口通信。这种方式可以提供比
PREEMPT_RT更低的延迟,但架构更复杂。
- PREEMPT_RT补丁:
- 适用场景:
高端工业机器人、数据采集与分析系统、电信基础设施等需要复杂计算和精确控制相结合的场景。例如,机器人既要运行高精度的运动控制,又要运行基于ROS 2的SLAM算法或图形化交互界面。
4. 从零构建(“造轮子”) (Building from Scratch / "Rolling Your Own")
这是一种高风险、高投入但可能带来极致优化的途径,通常只有在非常特殊的情况下才会考虑。
- 描述 (Description):
不依赖任何现有的OS,从最底层的硬件寄存器开始,自己编写任务调度器 (Scheduler)、中断管理、内存管理等所有核心组件。这本质上是自己开发一个专用的RTOS。
- 核心特点 (Core Features):
- 极致精简:
系统只包含绝对必要的功能,代码量极小,资源占用(RAM/Flash)最低。
- 最高性能:
可以针对特定硬件和特定应用进行终极优化,实现理论上最低的延迟。
- 完全可控:
对系统的每一个细节都有完全的控制权。
- 极致精简:
- 实现基础 (Fundamental Building Blocks):
- 任务调度器:
核心部分,决定哪个任务在何时运行。最简单的可以是基于时间片轮转的循环调度,复杂的可以是基于优先级的抢占式调度 (Preemptive Priority-Based Scheduler)。其核心是实现一个上下文切换 (Context Switch) 机制,保存和恢复任务的执行环境(CPU寄存器、程序计数器等)。

- 系统滴答 (System Tick):
利用硬件定时器产生周期性中断(如每1ms一次),作为系统的“心跳”,驱动调度器进行任务调度和时间管理。
- 同步与通信机制:
实现信号量 (Semaphore)、互斥锁 (Mutex)、消息队列 (Message Queue) 等基本的同步原语,用于任务间的协调与数据交换。
- 任务调度器:
- 适用场景:
资源极度受限的嵌入式系统(例如,只有几KB RAM的MCU)。
对实时性能的要求超越了所有现有RTOS能提供的水平。
出于教学或研究目的。
- 注意:
这条路需要开发者对操作系统内核和底层硬件有极其深入的理解,开发和维护成本极高,且存在引入潜在bug的巨大风险。
总结对比
途径 | 主要优势 | 主要劣势 | 典型应用 |
|---|---|---|---|
| 1. 商用RTOS | 可靠性高、有认证、专业支持 | 成本高、不够灵活 | 航空航天、汽车电子、关键工业控制 |
| 2. 开源RTOS | 成本低、灵活、社区活跃 | 可靠性/认证需自行负责、技术支持无保证 | 物联网、消费电子、非关键工业应用 |
| 3. Linux实时扩展 | 功能强大、生态成熟 | 架构复杂、实时性能非最优 | 高端机器人、数据采集、电信设备 |
| 4. 从零构建 | 极致性能、资源占用最小 | 开发/维护成本极高、风险大 | 资源极度受限的设备、学术研究 |

















 2006
2006

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









