





5axiskins.c
5axiskins.c 文件实现了 LinuxCNC 的一个五轴运动学模块,特别针对具有 XYZ 线性轴和 BC 旋转轴的桥式铣床结构。它还包含一个特殊的 W 轴,用于表示沿刀具方向的运动。该模块设计为可以在可切换运动学 (switchkins) 框架下使用。

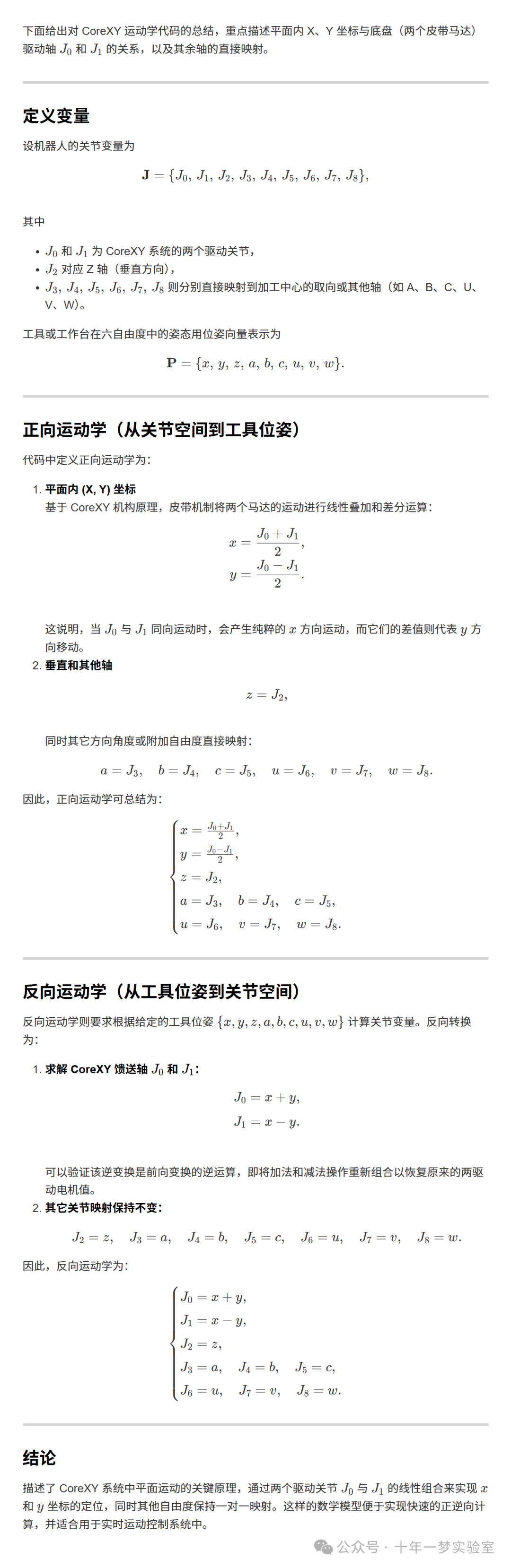
corexykins.c
cubic.c

genhexkins.c


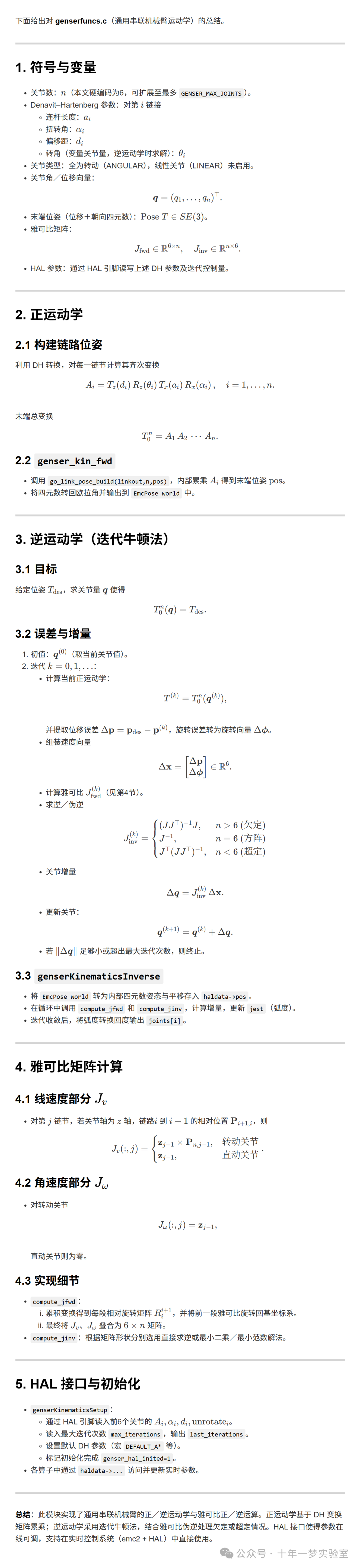
genserfuncs.c
kinematics.h

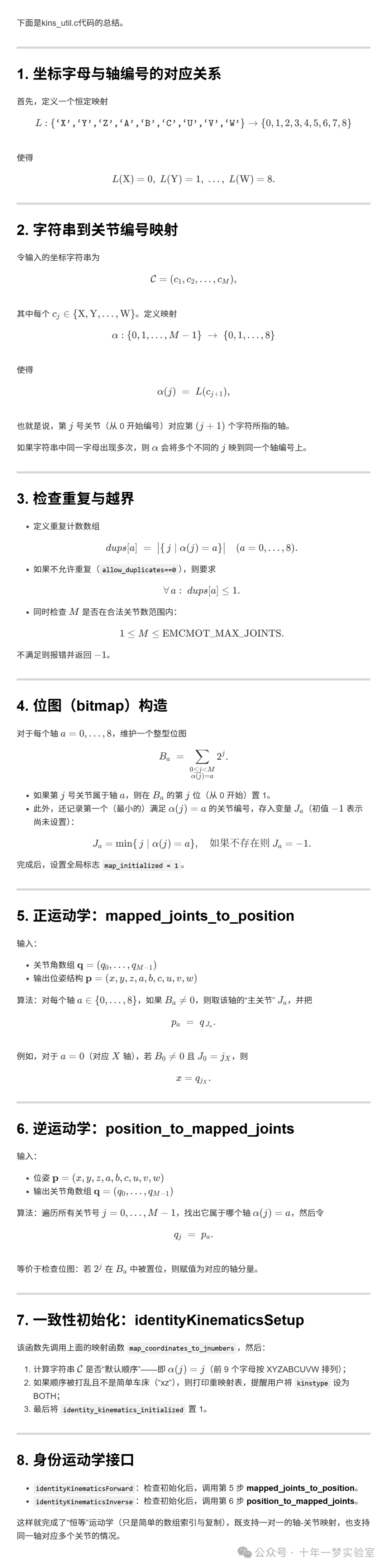
kins_util.c
lineardeltakins-common.h

maxkins.c

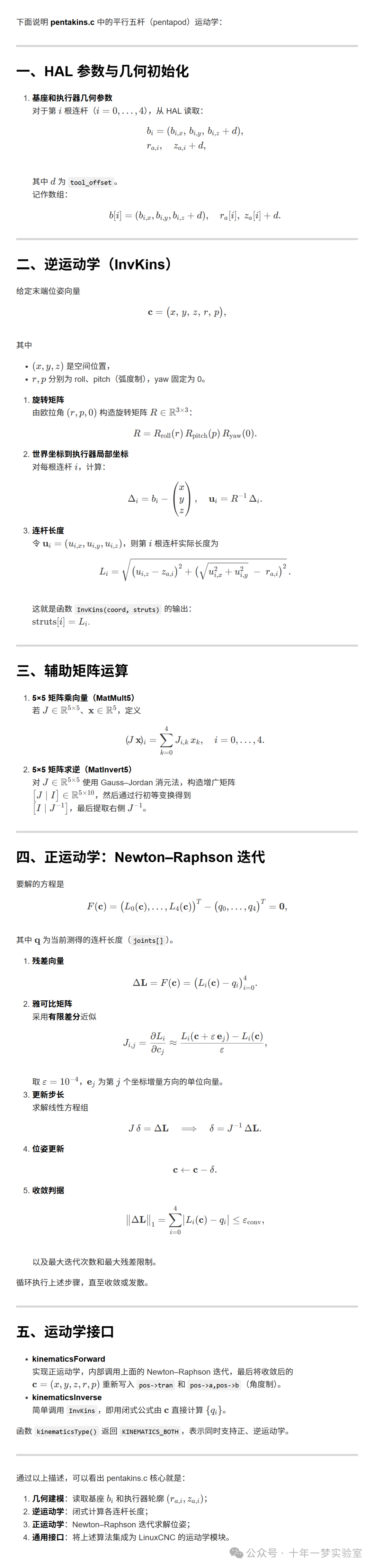
pentakins.c
pumakins.c

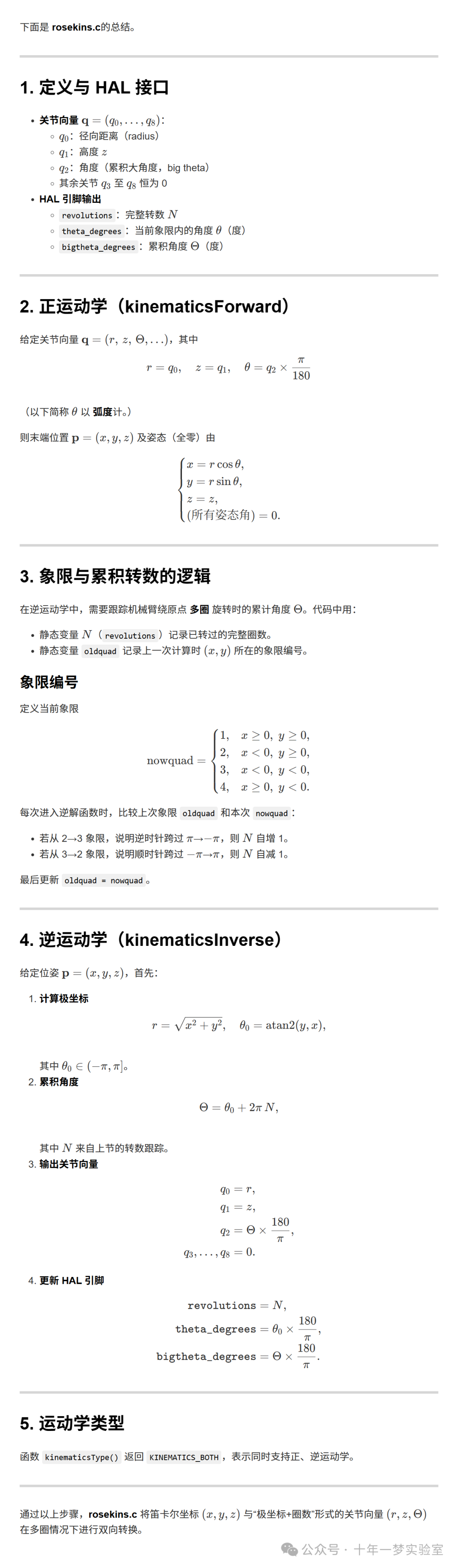
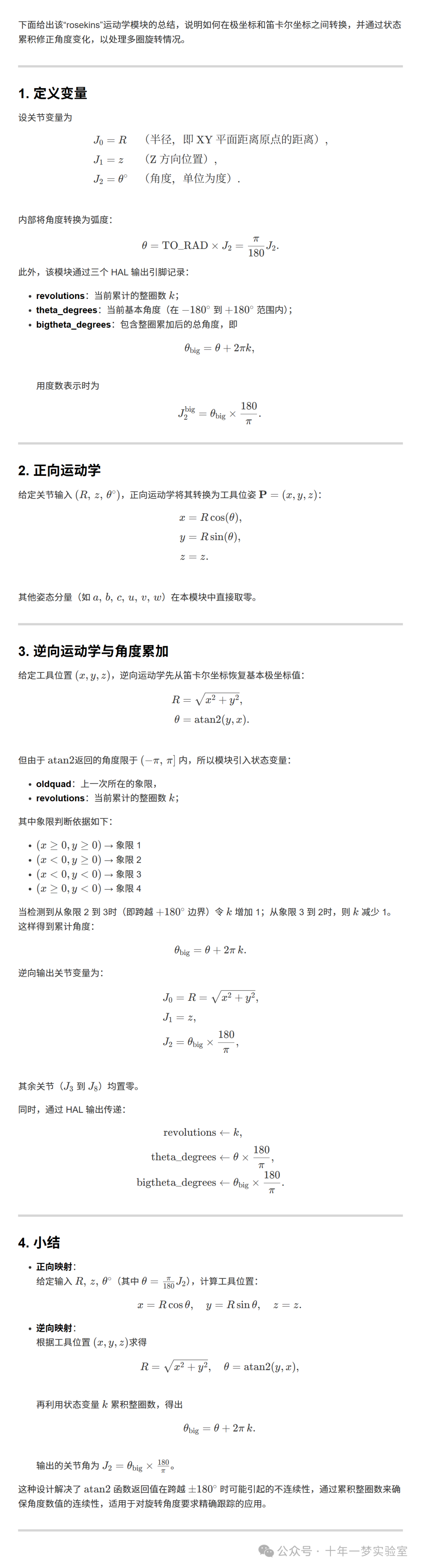
rosekins.c
rotarydeltakins-common.h

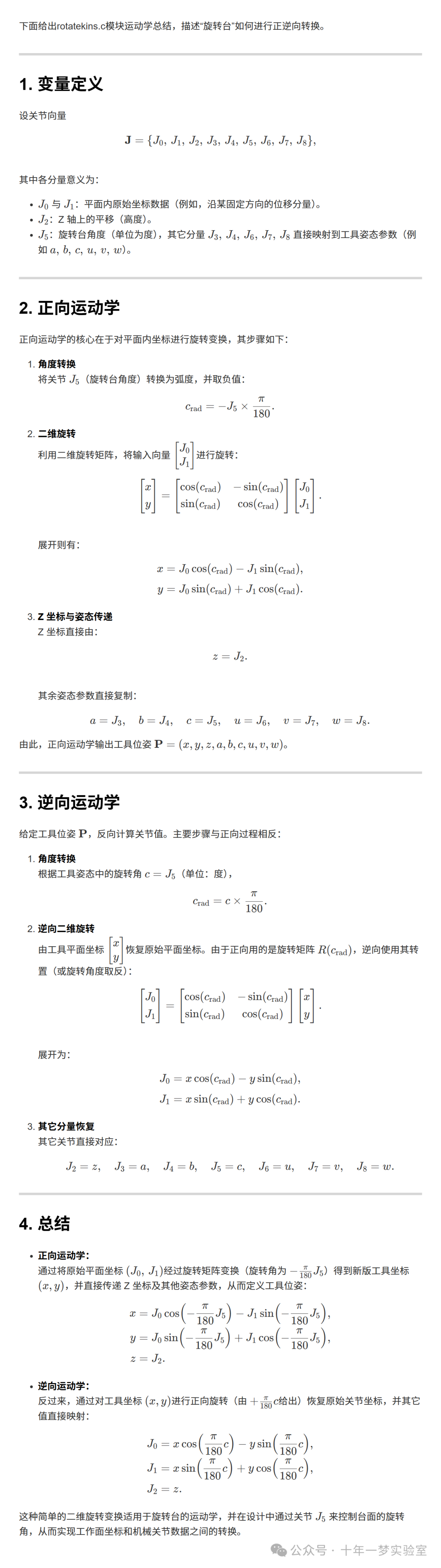
rotatekins.c
scarakins.c

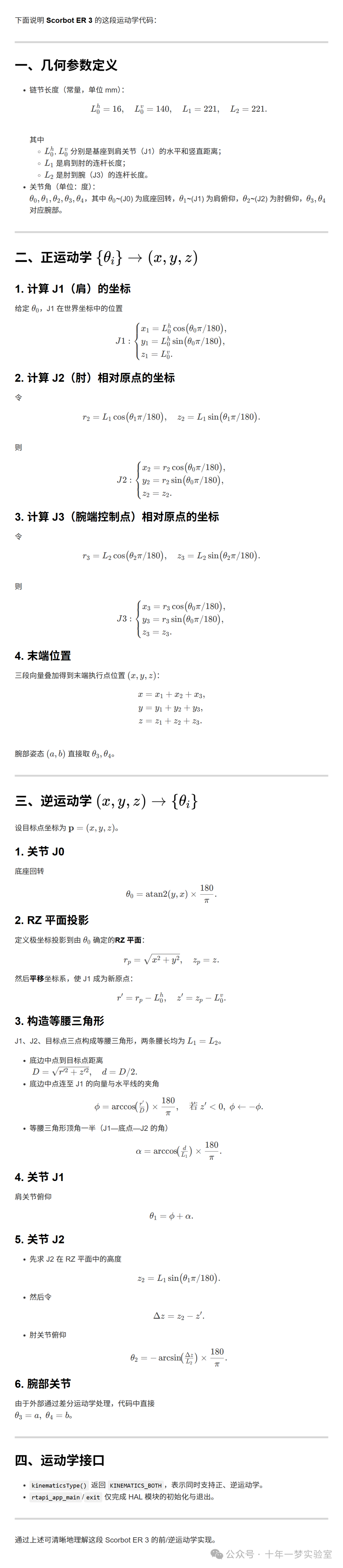
scorbot-kins.c
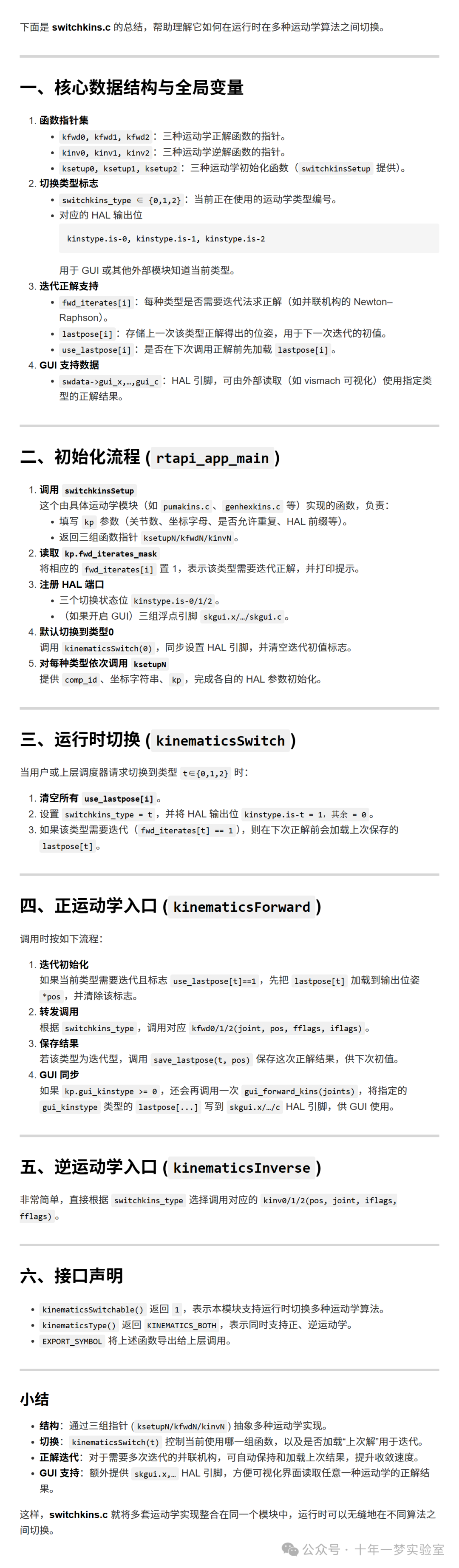
switchkins.c
tripodkins.c

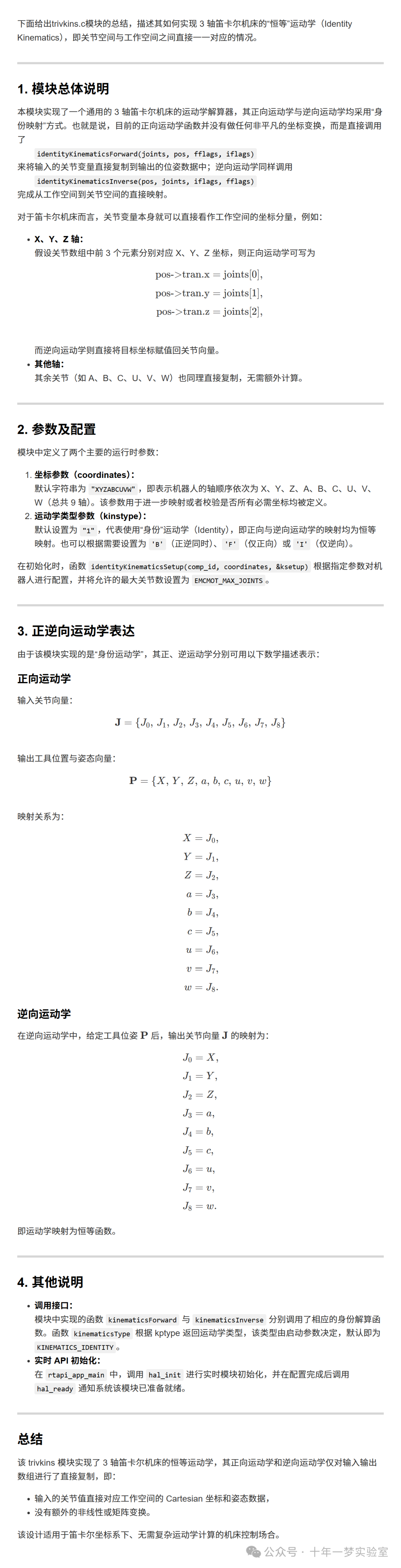
trivkins.c
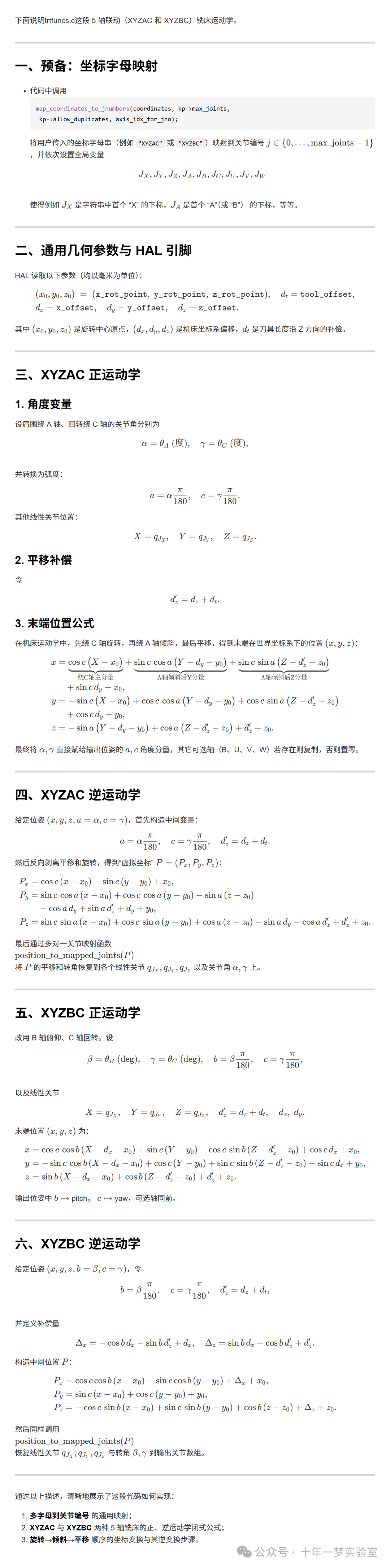
trtfuncs.c
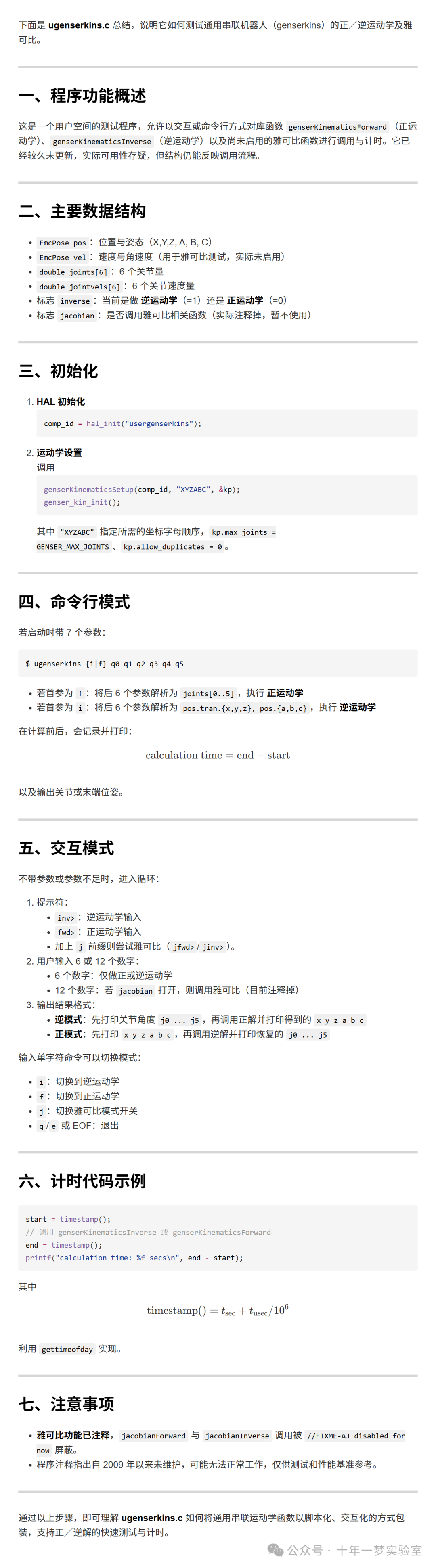
ugenserkins.c
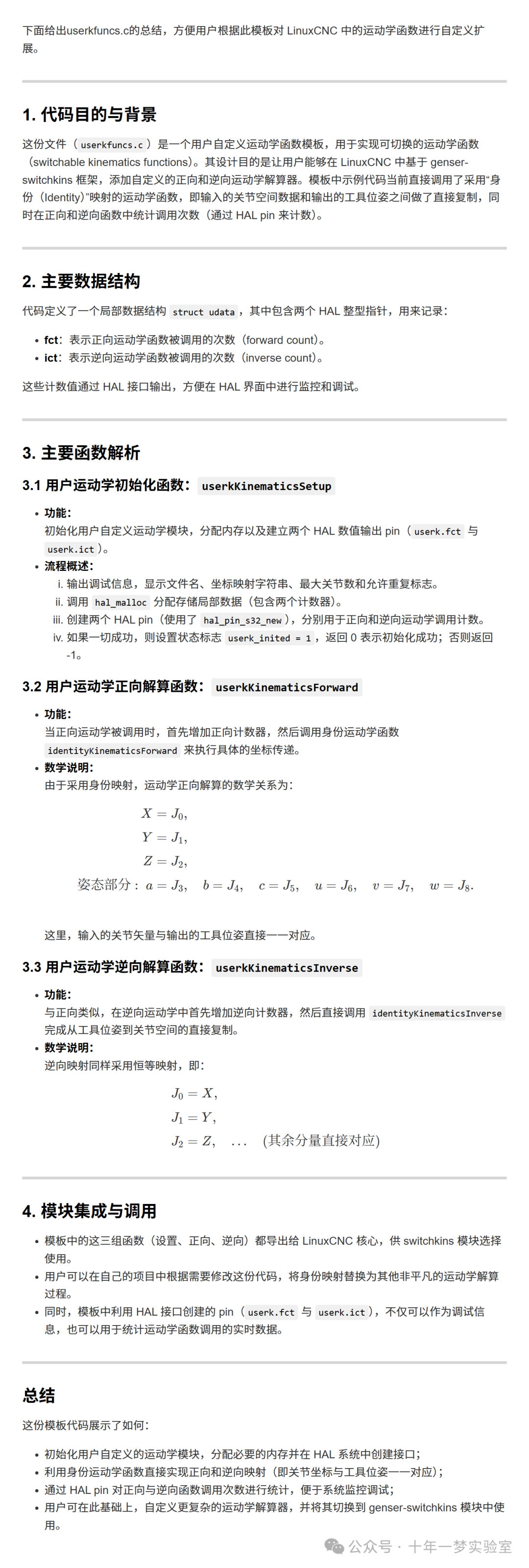
userkfuncs.c
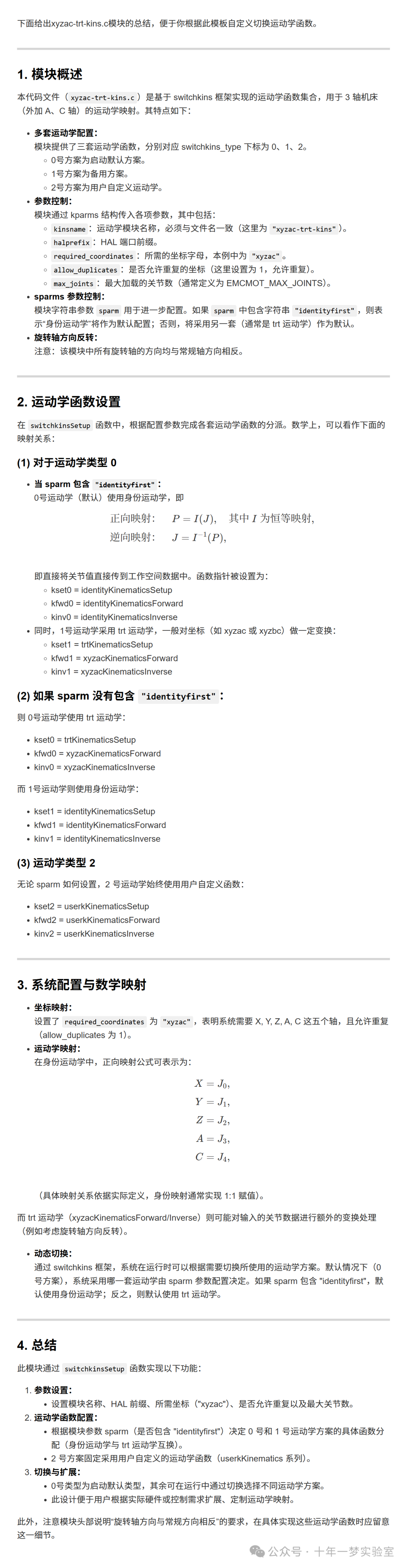
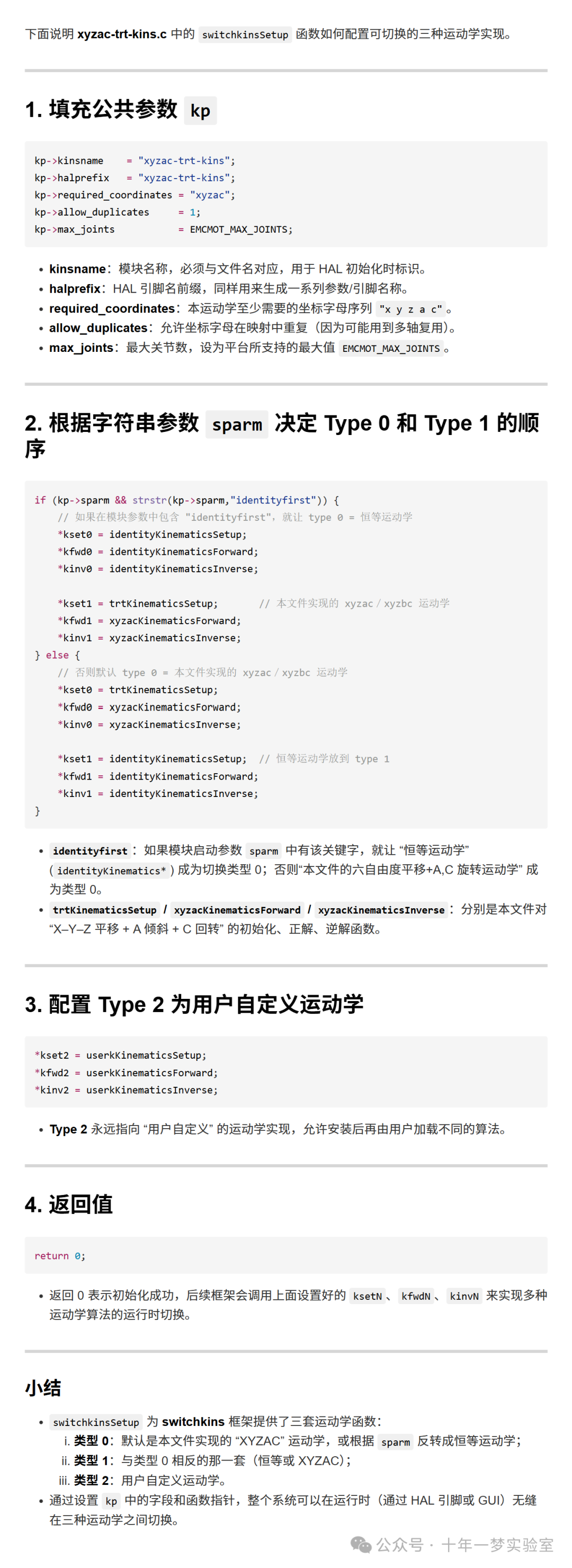
xyzac-trt-kins.c
xyzbc-trt-kins.c

















 2094
2094

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









