



第9章 数值优化
优化中的牛顿法
高斯 - 牛顿算法
高斯 - 牛顿法示例,逆运动学问题
非线性最小二乘法(曲线拟合)
非线性回归
非线性回归与非线性拟合的区别
列文伯格 - 马夸尔特算法
优化中的牛顿法

高斯 - 牛顿算法
高斯 - 牛顿算法是牛顿法的一种改进,用于寻找函数的最小值。
与牛顿法不同,它不需要二阶导数(二阶导数可能较难计算)。

参考文献:https://math.stackexchange.com/questions/19948/pseudoinverse-matrix-and-svd
高斯 - 牛顿法示例,逆运动学问题
接下来我们将求解一个三连杆平面机器人的逆运动学问题。
这段C++代码主要涉及正向运动学和逆运动学计算。它使用Eigen库处理矩阵和几何变换,定义了多个类型和函数模板,提供了数值微分功能,并实现了目标函数,计算机器人末端执行器在二维平面上的位置和姿态。
主要内容概括:
- 包含的库
:包括数学、输入输出流以及Eigen库的密集矩阵运算、几何运算和数值微分头文件。
- 类型定义
:定义了向量类型、矩阵类型和二维仿射变换类型。
- 函数声明
:
forward_kinematics:正向运动学函数。
pseudoInverse:伪逆函数模板。
transformationMatrixToPose:将变换矩阵转换为姿态的函数。
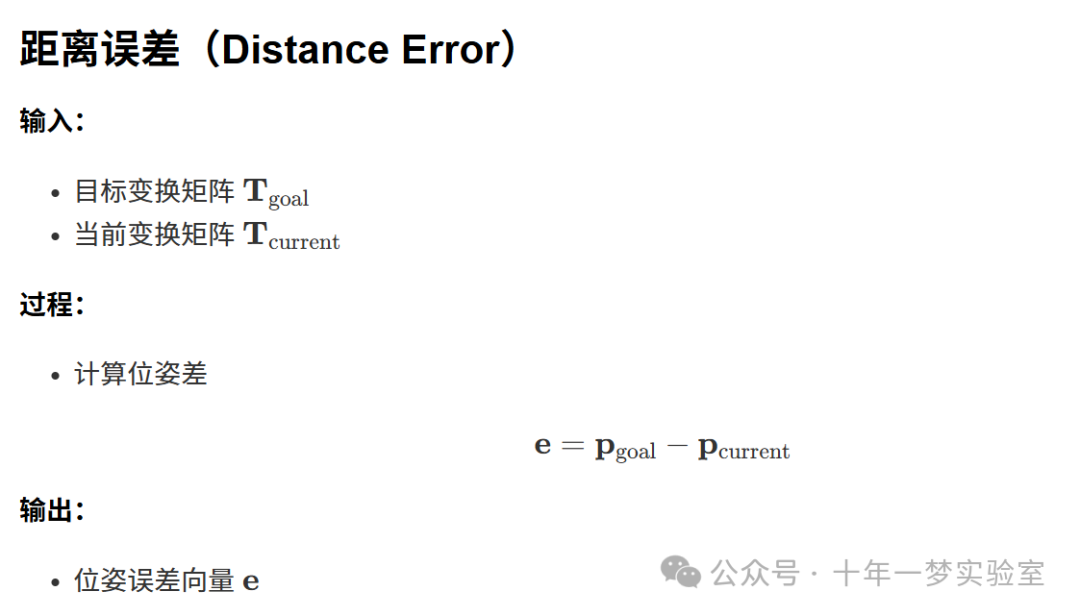
distanceError:计算距离误差函数。
inverse_kinematics:逆运动学函数(两种形式)。
:
Functor:一个通用的函数对象结构体,定义了输入和输出类型及其维度。
numericalDifferentiationFKFunctor:数值微分正向运动学函数对象,实现了具体的目标函数,计算机器人末端在平面上的位置(x,y)和旋转角度(theta)。
:
signum:符号函数模板,处理符号类型和非符号类型。
normaliseAngle和
normaliseAngle2:角度归一化函数模板。
这段代码可以用于机器人运动学计算,特别是涉及到正向和逆向的运动学问题。
task.hpp
#include <math.h> // 包含数学库的头文件
#include <iostream> // 包含输入输出流的头文件
#include <Eigen/Dense> // 包含Eigen库的密集矩阵运算头文件
#include <Eigen/Geometry> // 包含Eigen库的几何运算头文件
#include <eigen3/unsupported/Eigen/NumericalDiff> // 包含Eigen库不支持的数值微分头文件
typedef Eigen::VectorXd vector_t;// 定义向量类型
typedef Eigen::MatrixXd matrix_t;// 定义矩阵类型
typedef Eigen::Transform<double,2,Eigen::Affine> trafo2d_t;// 定义二维仿射变换类型
trafo2d_t forward_kinematics(vector_t const& q );// 声明正向运动学函数
template<typenameT>
T pseudoInverse(const T &a,double epsilon = std::numeric_limits<double>::epsilon());// 声明伪逆函数模板
template<typename_Scalar,int NX = Eigen::Dynamic,int NY = Eigen::Dynamic>
structFunctor
{
typedef _Scalar Scalar;// 定义标量类型
enum{
InputsAtCompileTime = NX,// 编译时输入维度
ValuesAtCompileTime = NY // 编译时输出维度
};
typedef Eigen::Matrix<Scalar,InputsAtCompileTime,1> InputType;// 输入类型
typedef Eigen::Matrix<Scalar,ValuesAtCompileTime,1> ValueType;// 输出类型
typedef Eigen::Matrix<Scalar,ValuesAtCompileTime,InputsAtCompileTime> JacobianType;// 雅可比类型
int m_inputs, m_values;// 输入和输出维度
Functor():m_inputs(InputsAtCompileTime),m_values(ValuesAtCompileTime){}// 默认构造函数
Functor(int inputs,int values):m_inputs(inputs),m_values(values){}// 参数化构造函数
intinputs()const{return m_inputs;}// 获取输入维度
intvalues()const{return m_values;}// 获取输出维度
};
structnumericalDifferentiationFKFunctor:Functor<double>
{
numericalDifferentiationFKFunctor():Functor<double>(3,3){}// 简单构造函数
intoperator()(const Eigen::VectorXd &q, Eigen::VectorXd &fvec)const// 实现目标函数
{
trafo2d_t t =forward_kinematics(q);// 调用正向运动学函数
double theta =atan2(t.rotation()(1,0),t.rotation()(0,0));// 计算旋转角度
double x = t.translation()(0);// 获取平移X分量
double y = t.translation()(1);// 获取平移Y分量
fvec(0)= x;// 设置输出向量X分量
fvec(1)= y;// 设置输出向量Y分量
fvec(2)= theta;// 设置输出向量旋转角度
return0;// 返回成功状态
}
};
Eigen::MatrixXd numericalDifferentiationFK(const Eigen::VectorXd &q);// 声明数值微分正向运动学函数
Eigen::VectorXd transformationMatrixToPose(trafo2d_t const&m);// 声明将变换矩阵转换为姿态的函数
Eigen::VectorXd distanceError(trafo2d_t const&golesStart, trafo2d_t const&poseStart);// 声明距离误差函数
template<typenameT>inlineconstexpr
intsignum(T x, std::false_type is_signed);// 声明符号函数模板,非符号类型
template<typenameT>inlineconstexpr
intsignum(T x, std::true_type is_signed);// 声明符号函数模板,符号类型
template<typenameT>
voidnormaliseAngle(T &q);// 声明角度归一化函数模板
template<typenameT>
voidnormaliseAngle2(T &q);// 声明另一个角度归一化函数模板
voidnormaliseAngle(Eigen::VectorXd &q);// 声明角度归一化函数
voidnormaliseAngle2(Eigen::VectorXd &q);// 声明另一个角度归一化函数
vector_t inverse_kinematics(vector_t const& q_start, trafo2d_t const& goal );// 声明逆运动学函数,带起始位置
vector_t inverse_kinematics(trafo2d_t const& goal );// 声明逆运动学函数,带目标位置task.cpp
#include "task.hpp" // 包含自定义任务的头文件
typedef Eigen::VectorXd vector_t;// 定义Eigen库中的向量类型,用于表示关节角度等
typedef Eigen::MatrixXd matrix_t;// 定义Eigen库中的矩阵类型,用于表示雅可比矩阵等
typedef Eigen::Transform<double,2,Eigen::Affine> trafo2d_t;// 定义二维仿射变换类型,用于表示机器人连杆的变换
/**************************************************
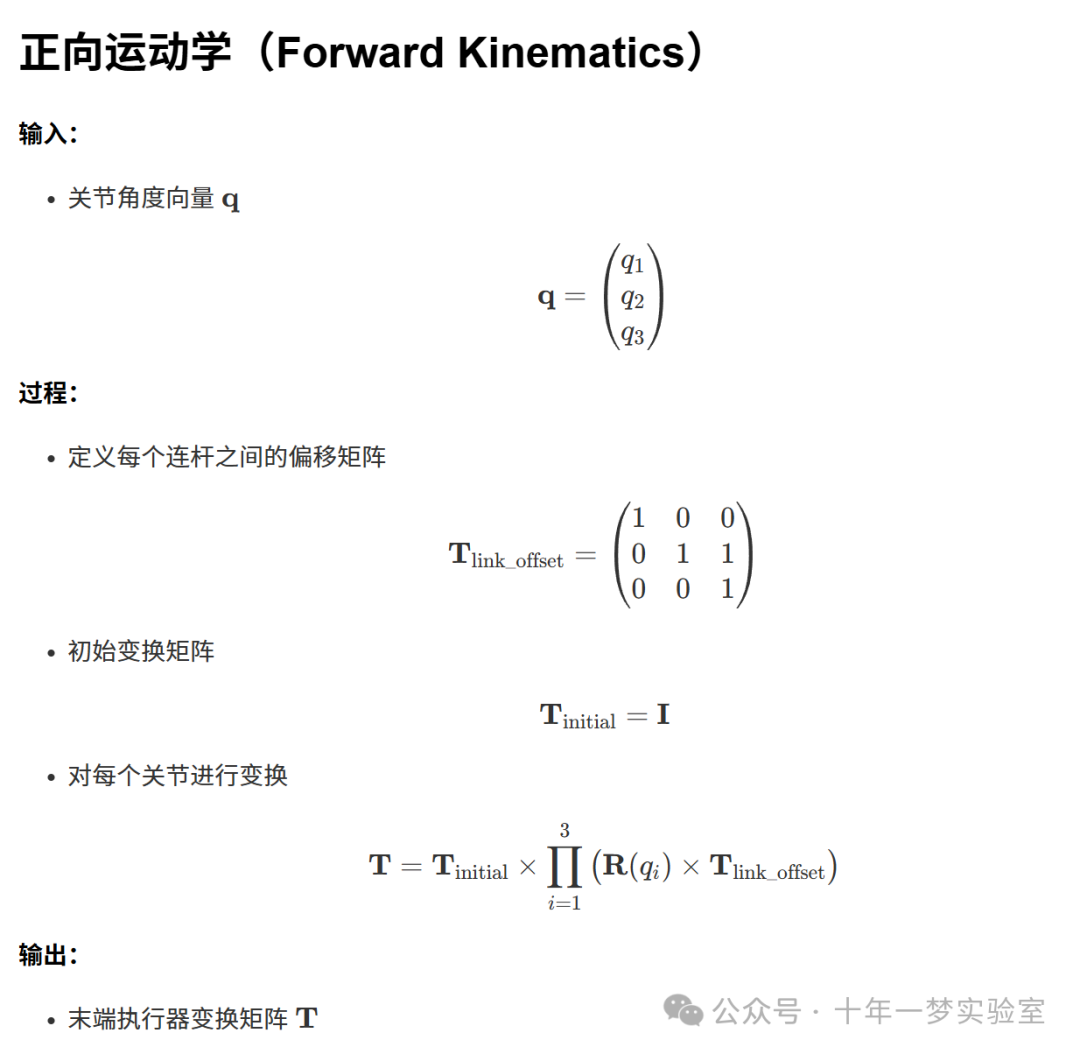
* 计算平面3连杆机器人的正向运动学的函数。
* 输入参数q为关节角度向量,返回值为末端执行器的变换矩阵。
*************************************************/
trafo2d_t forward_kinematics(vector_t const& q ){
// 检查关节角度向量的大小是否为3,如果不是,则程序将中止
assert( q.size()==3);
// 定义两个关节之间的恒定偏移,初始化为单位矩阵
trafo2d_t link_offset = trafo2d_t::Identity();
link_offset.translation()(1)=1.;// 在y轴方向上的平移量设为1
// 定义机器人的起始位姿,初始化为单位矩阵
trafo2d_t trafo = trafo2d_t::Identity();
for(int joint_idx =0; joint_idx <3; joint_idx++){
// 添加由当前关节贡献的旋转变换
trafo *= Eigen::Rotation2D<double>(q(joint_idx));
// 添加当前连杆的偏移变换
trafo = trafo * link_offset;
}
// 返回末端执行器的变换矩阵
return trafo;
}
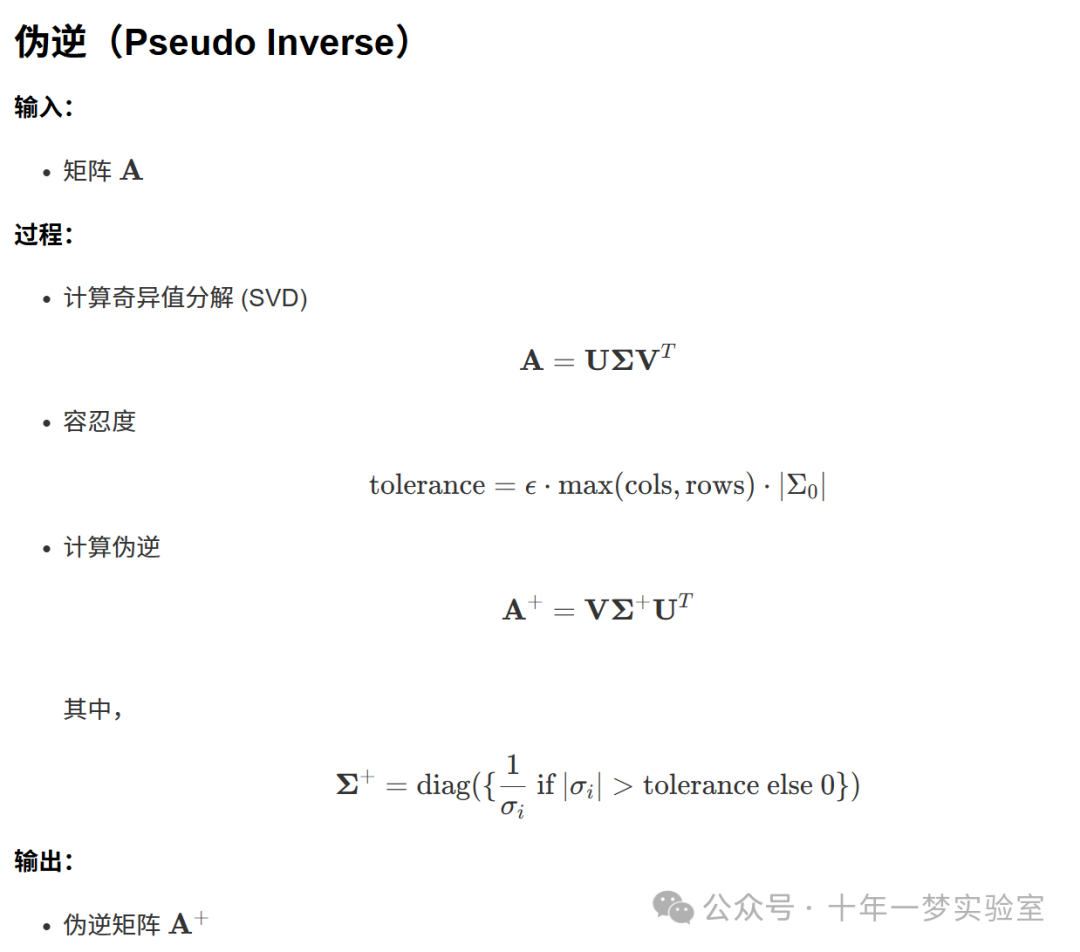
template<typenameT>
T pseudoInverse(const T &a,double epsilon)
{
//Eigen::DecompositionOptions flags;
int flags;
// 对于非方阵,设置分解选项
if(a.cols()!= a.rows())
{
flags = Eigen::ComputeThinU | Eigen::ComputeThinV;
}
else
{
// 对于方阵,设置分解选项
flags = Eigen::ComputeFullU | Eigen::ComputeFullV;
}
// 计算SVD分解
Eigen::JacobiSVD<T>svd(a, flags);
// 计算容忍度
double tolerance = epsilon * std::max(a.cols(), a.rows())* svd.singularValues().array().abs()(0);
// 返回伪逆矩阵
return svd.matrixV()*(svd.singularValues().array().abs()> tolerance).select(svd.singularValues().array().inverse(),0).matrix().asDiagonal()* svd.matrixU().adjoint();
}
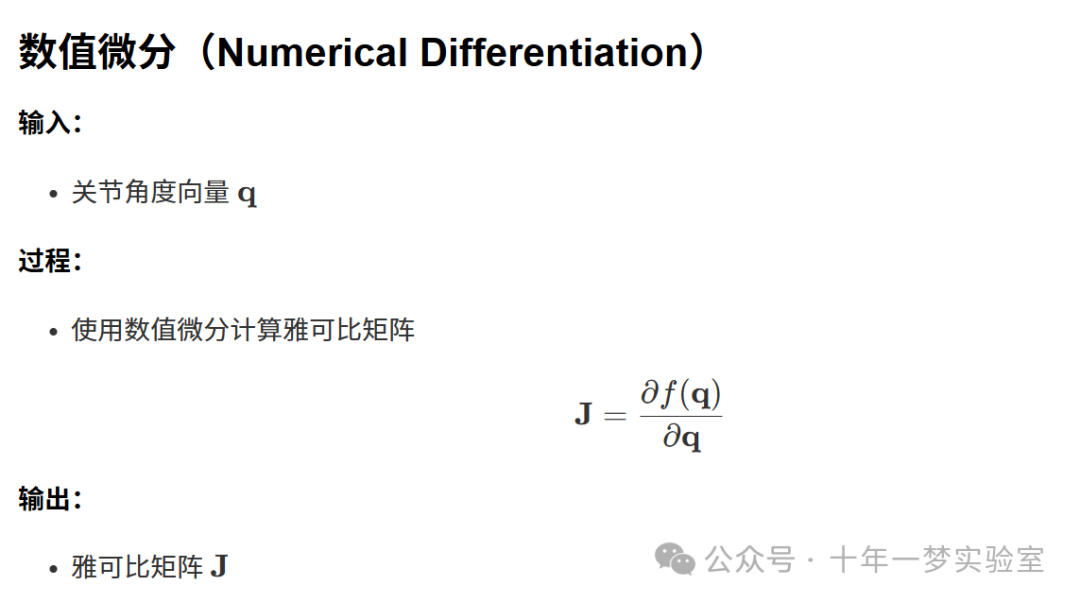
// 数值微分正向运动学函数,输入关节角度向量q,返回雅可比矩阵
Eigen::MatrixXd numericalDifferentiationFK(const Eigen::VectorXd &q)
{
numericalDifferentiationFKFunctor functor;// 定义函数对象
Eigen::NumericalDiff<numericalDifferentiationFKFunctor>numDiff(functor);// 定义数值微分对象
Eigen::MatrixXd fjac(3,3);// 定义雅可比矩阵
numDiff.df(q, fjac);// 计算雅可比矩阵
return fjac;// 返回雅可比矩阵
}
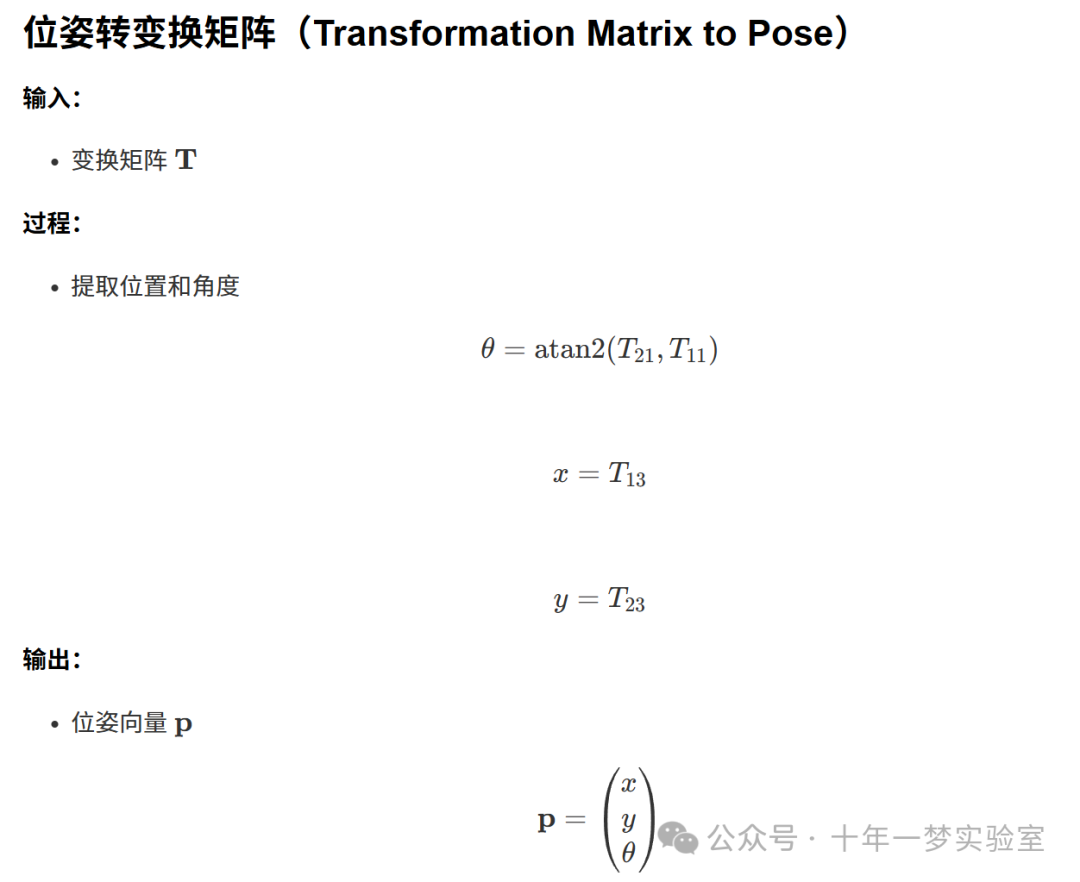
// 将变换矩阵转换为位姿向量,包含x、y和旋转角度theta
Eigen::VectorXd transformationMatrixToPose(trafo2d_t const&m)
{
double theta =atan2(m.rotation()(1,0), m.rotation()(0,0));// 计算旋转角度
double x = m.translation()(0);// 获取x方向的平移量
double y = m.translation()(1);// 获取y方向的平移量
Eigen::VectorXd fvec(3);// 定义位姿向量
fvec(0)= x;// 设置x方向的平移量
fvec(1)= y;// 设置y方向的平移量
fvec(2)= theta;// 设置旋转角度
return fvec;// 返回位姿向量
}
// 计算目标位姿与当前位姿之间的距离误差
Eigen::VectorXd distanceError(trafo2d_t const&golesStart, trafo2d_t const&poseStart)
{
returntransformationMatrixToPose(golesStart)-transformationMatrixToPose(poseStart);// 返回位姿差
}
template<typenameT>inlineconstexpr
intsignum(T x, std::false_type is_signed){
returnT(0)< x;// 判断非符号类型的符号函数
}
template<typenameT>inlineconstexpr
intsignum(T x, std::true_type is_signed){
return(T(0)< x)-(x <T(0));// 判断符号类型的符号函数
}
// 符号函数,根据输入类型选择对应的符号计算方法
template<typenameT>inlineconstexpr
intsignum(T x){
returnsignum(x, std::is_signed<T>());// 根据输入类型调用不同的符号函数
}
// 角度归一化函数模板
template<typenameT>
voidnormaliseAngle(T &q)
{
int sign =signum(q);// 获取角度的符号
q =fabs(q);// 取角度的绝对值
q = sign *remainder(q,2* M_PI);// 归一化角度
if(sign <0)
q = q +2* M_PI;// 如果角度为负,加2π
}
// 另一个角度归一化函数模板
template<typenameT>
voidnormaliseAngle2(T &q)
{
int sign =signum(q);// 获取角度的符号
q =remainder(q, sign *2* M_PI);// 归一化角度
if(-2* M_PI <= q && q <=-M_PI)
q = q +2* M_PI;// 如果角度在-2π到-π之间,加2π
elseif(M_PI <= q && q <=2* M_PI)
q =2* M_PI - q;// 如果角度在π到2π之间,取2π减去角度
}
// 归一化向量中的每个角度
voidnormaliseAngle(Eigen::VectorXd &q)
{
for(int i =0; i < q.rows(); i++)
{
normaliseAngle(q(i));// 调用角度归一化函数
}
}
// 归一化向量中的每个角度,使用另一种归一化方法
voidnormaliseAngle2(Eigen::VectorXd &q)
{
for(int i =0; i < q.rows(); i++)
{
normaliseAngle2(q(i));// 调用另一个角度归一化函数
}
}
/*************************************************
* 任务:
* 完成上述正向运动学函数定义的机器人逆运动学函数。
* 它应返回给定目标参数指定的关节角度q。
* 只需要匹配目标的平移部分(不旋转)。
*
* 提示:
* - 这是一个非线性优化问题,可以使用迭代算法解决。
* - 要获取雅可比矩阵,请使用数值微分
* - 要反转雅可比矩阵,请使用Eigen::JacobiSVD
* - 当误差范数小于1e-3时,算法应停止
* - 当迭代次数达到200次时,算法应停止
************************************************/
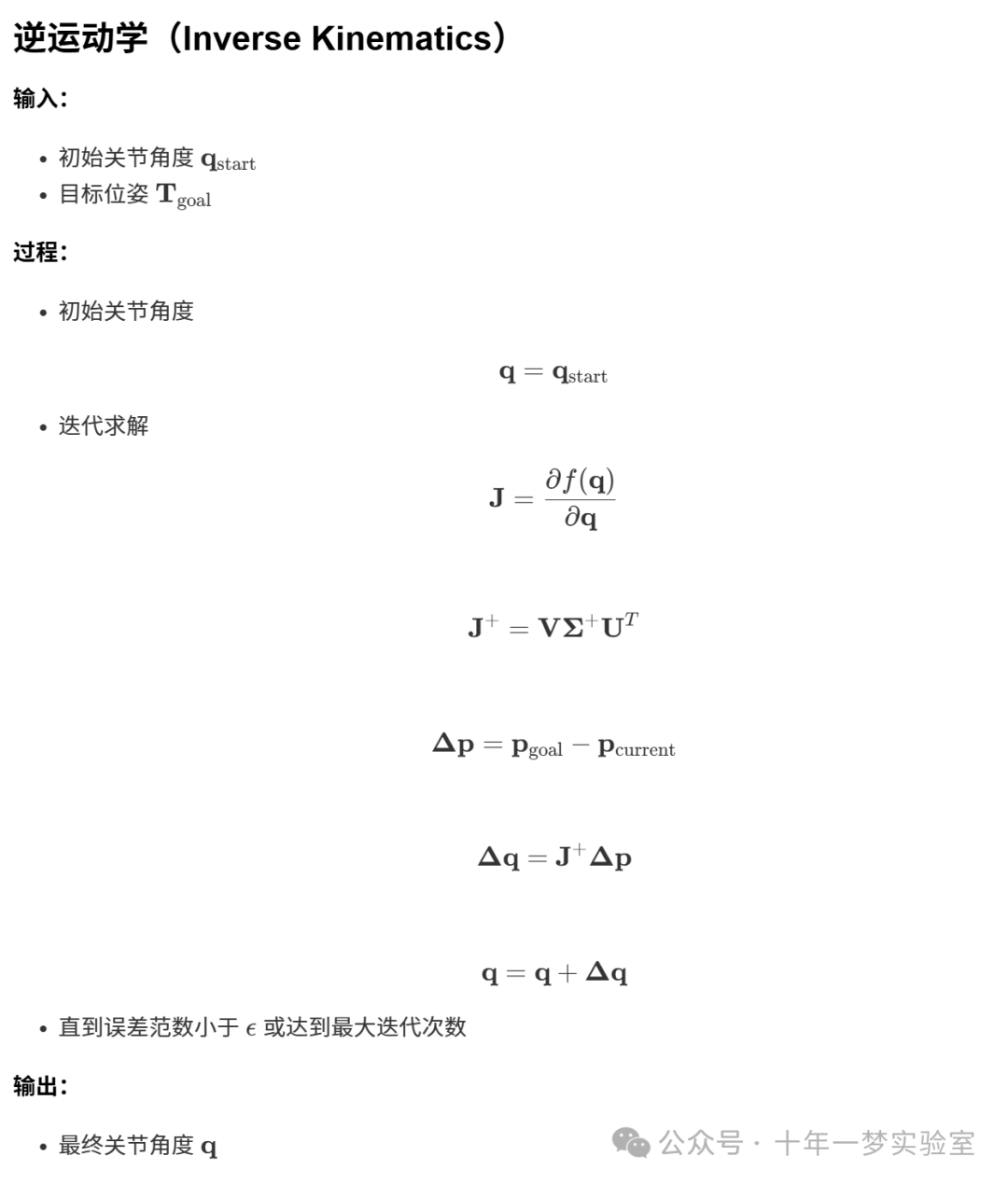
vector_t inverse_kinematics(vector_t const& q_start, trafo2d_t const& goal )
{
vector_t q = q_start;// 初始化关节角度向量为起始值
vector_t delta_q(3);// 定义关节角度增量向量
double epsilon =1e-3;// 定义误差容忍度
int i =0;// 迭代次数初始化
double gamma;// 定义增量因子
double stepSize =10;// 定义步长
// 迭代求解逆运动学
while((distanceError(goal,forward_kinematics(q)).squaredNorm()> epsilon)&&(i <200))
{
Eigen::MatrixXd jacobian =numericalDifferentiationFK(q);// 计算雅可比矩阵
Eigen::MatrixXd j_pinv =pseudoInverse(jacobian);// 计算雅可比矩阵的伪逆
Eigen::VectorXd delta_p =transformationMatrixToPose(goal)-transformationMatrixToPose(forward_kinematics(q));// 计算位姿误差
gamma =sqrt(pow(delta_p(0),2)+pow(delta_p(1),2));// 计算误差范数
//std::cout<<"gamma" <<gamma <<std::endl;
// 如果误差范数大于2,对误差进行缩放
if(gamma >2)
{
delta_p(0)=delta_p(0)/ stepSize * gamma;// 缩放x方向误差
delta_p(1)=delta_p(1)/ stepSize * gamma;// 缩放y方向误差
}
else
{
delta_p(0)=delta_p(0)/ stepSize;// x方向误差除以步长
delta_p(1)=delta_p(1)/ stepSize;// y方向误差除以步长
}
delta_q = j_pinv * delta_p;// 计算关节角度增量
q = q + delta_q;// 更新关节角度
normaliseAngle2(q);// 归一化更新后的角度
i++;// 增加迭代计数器
}
return q;// 返回最终的关节角度
}
// 逆运动学函数重载,输入目标位姿,输出关节角度
vector_t inverse_kinematics(trafo2d_t const& goal )
{
vector_t q_start(3);// 定义初始关节角度向量
q_start.setConstant(0.0);// 初始角度设为0
returninverse_kinematics(q_start, goal);// 调用带初始角度的逆运动学函数
}
/**
* 一个如何使用逆运动学的示例。
* 不需要更改这段代码。
*/这段代码实现了一个平面3连杆机器人逆运动学的非线性优化求解。主要步骤如下:
计算正向运动学以获取末端执行器的变换矩阵。
使用伪逆求解雅可比矩阵。
通过迭代算法逐步减少位姿误差,直到误差小于预设容忍度或迭代次数达到上限。
main.cpp
这段代码实现了一个机器人逆运动学求解的示例。具体功能包括:
- 初始化关节角度
:定义初始关节角度向量并设置其值为-0.1。
- 设置目标位姿
:定义目标位姿变换矩阵,并将其x方向的平移量设置为1.0。
- 输出目标位姿
:将目标位姿转换为位姿向量并输出。
- 求解逆运动学
:调用
inverse_kinematics函数,通过给定的初始关节角度和目标位姿,计算得到满足目标位姿的关节角度。 - 输出结果
:
输出计算得到的关节角度。
输出目标位姿转换为的位姿向量。
输出通过逆运动学计算得到的关节角度的正向运动学估计位姿。
:返回0表示程序成功结束。
通过这个示例,展示了如何使用逆运动学函数将目标位姿转换为相应的关节角度,并验证计算结果的准确性。
#include "task.hpp" // 包含自定义任务的头文件
intmain()
{
// 定义初始关节角度向量,维度为3
vector_t q_start(3);
// 将初始关节角度向量的所有元素设置为-0.1
q_start.setConstant(-0.1);
// 定义目标位姿,初始化为单位矩阵
trafo2d_t goal = trafo2d_t::Identity();
// 设置目标位姿在x方向上的平移量为1.0
goal.translation()(0)=1.0;
// 定义目标关节值向量,维度为3
Eigen::VectorXd goalJointValues(3);
// 输出目标位姿转换为的位姿向量
std::cout <<"goal:\n"<<transformationMatrixToPose(goal)<< std::endl;
// 调用逆运动学函数,计算给定目标位姿的关节角度
vector_t result =inverse_kinematics(q_start, goal);
// 输出计算得到的关节角度
std::cout <<"joint values for the given pose are:\n"<< result << std::endl;
// 输出目标位姿转换为的位姿向量
std::cout <<"goal pose is:\n"<<transformationMatrixToPose(goal)<< std::endl;
// 输出通过逆运动学计算得到的关节角度正向运动学的估计位姿
std::cout <<"estimated pose from IK is:\n"<<transformationMatrixToPose(forward_kinematics(result))<< std::endl;
// 返回0表示程序成功结束
return0;
}曲线拟合 Curve Fitting
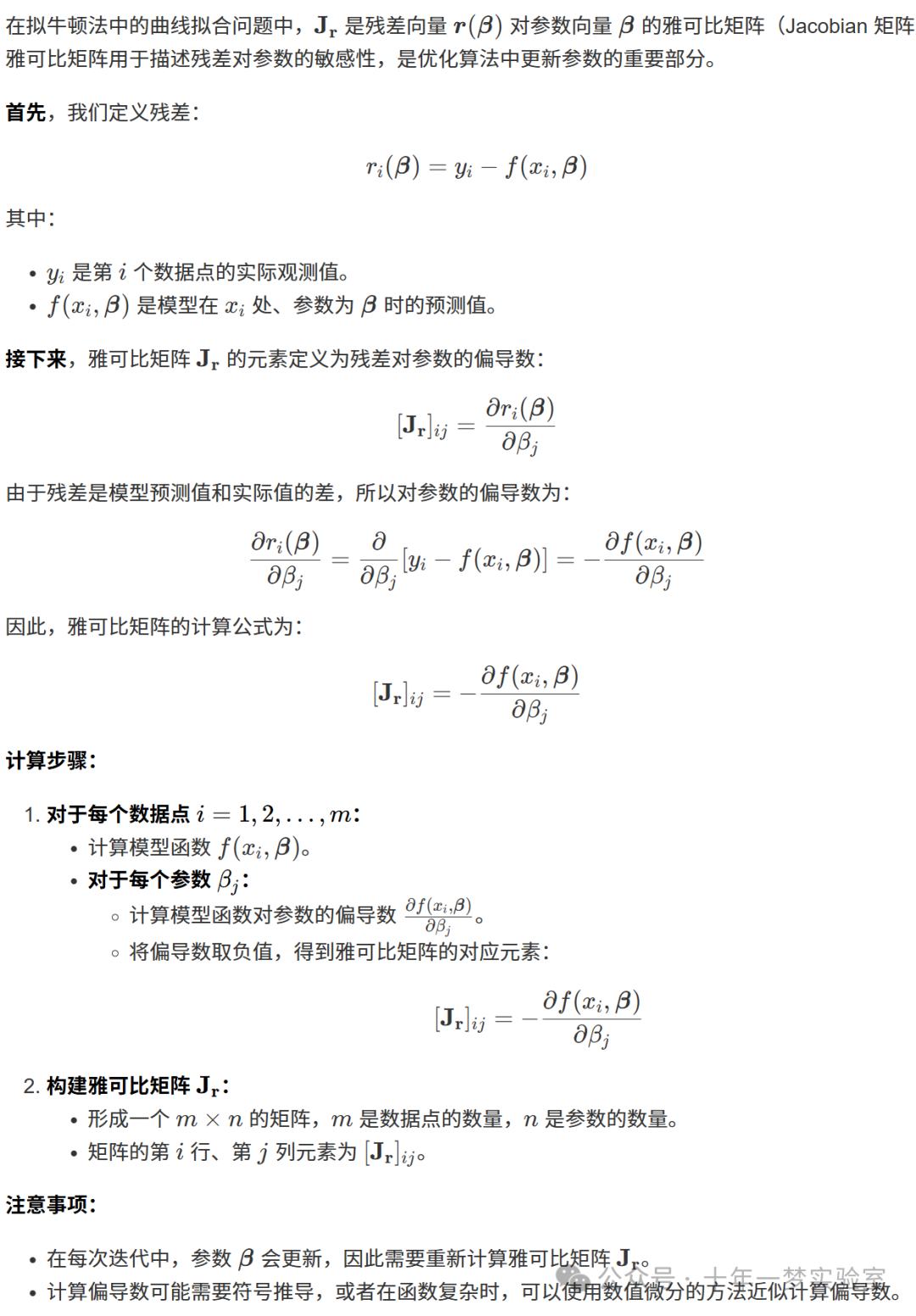
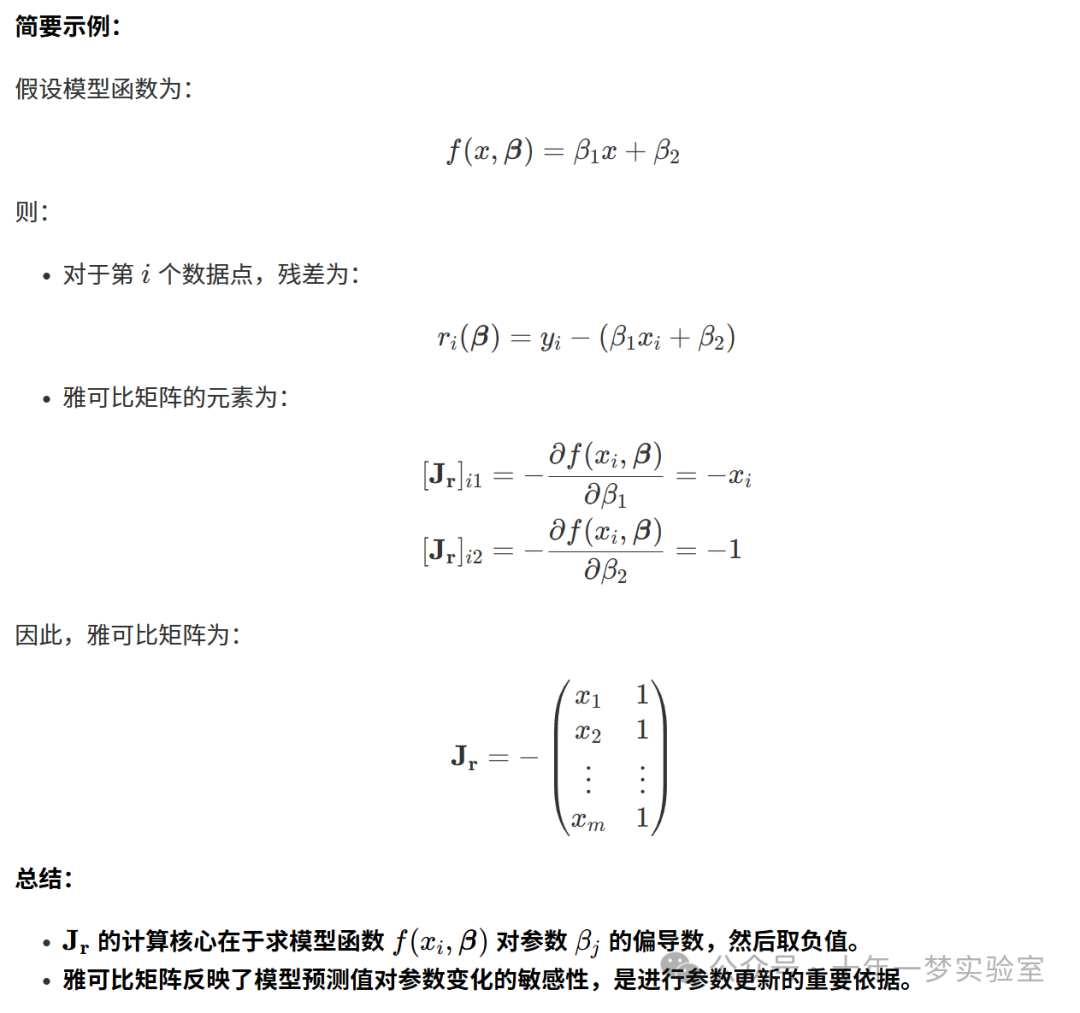
如何计算? Jr
底物浓度曲线拟合示例 (非线性模型参数的最小二乘拟合 - NON LINEAR LEAST SQUARES)
假设我们有以下数据集:
| ii | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
[S] | 0.038 | 0.194 | 0.425 | 0.626 | 1.253 | 2.500 | 3.740 |
Rate | 0.050 | 0.127 | 0.094 | 0.2122 | 0.2729 | 0.2665 | 0.3317 |
并且我们有以下函数来拟合数据:
#include <iostream> // 包含标准输入输出流库
#include <vector> // 包含向量容器库
#include <iomanip> // 包含输入输出操作的辅助库,用于设置输出格式
#include <Eigen/Dense> // 包含Eigen库的密集矩阵运算头文件
#include <Eigen/Eigenvalues> // 包含Eigen库的特征值计算头文件
#include <Eigen/Geometry> // 包含Eigen库的几何变换头文件
#include <eigen3/unsupported/Eigen/NumericalDiff> // 包含Eigen库中不受支持的数值微分功能头文件
#include <unsupported/Eigen/NonLinearOptimization> // 包含Eigen库中不受支持的非线性优化功能头文件
#include <unsupported/Eigen/NumericalDiff> // 再次包含数值微分功能头文件(可能多余)
/*
链接:
https://en.wikipedia.org/wiki/Gauss–Newton_algorithm
https://en.wikipedia.org/wiki/Non-linear_least_squares
https://lingojam.com/SuperscriptGenerator
https://lingojam.com/SubscriptGenerator
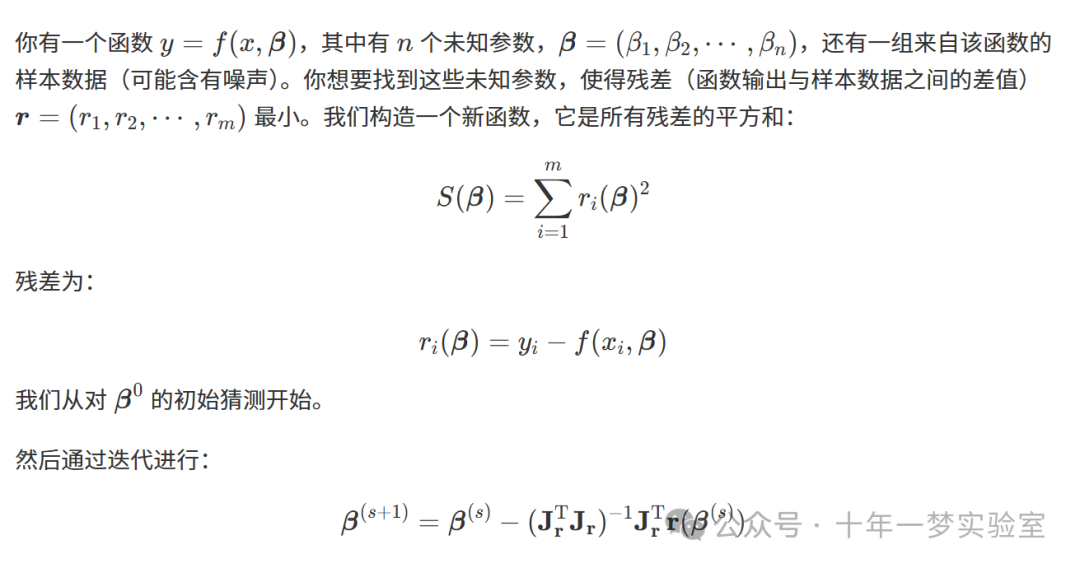
考虑 m 个数据点:
(x₁, y₁), (x₂, y₂), ..., (xₘ, yₘ)
以及一个具有 n 个参数的函数:
β = (β₁, β₂, ..., βₙ)
其中 m ≥ n
这给予我们 m 个残差:
rᵢ = yᵢ - f(xᵢ, β)
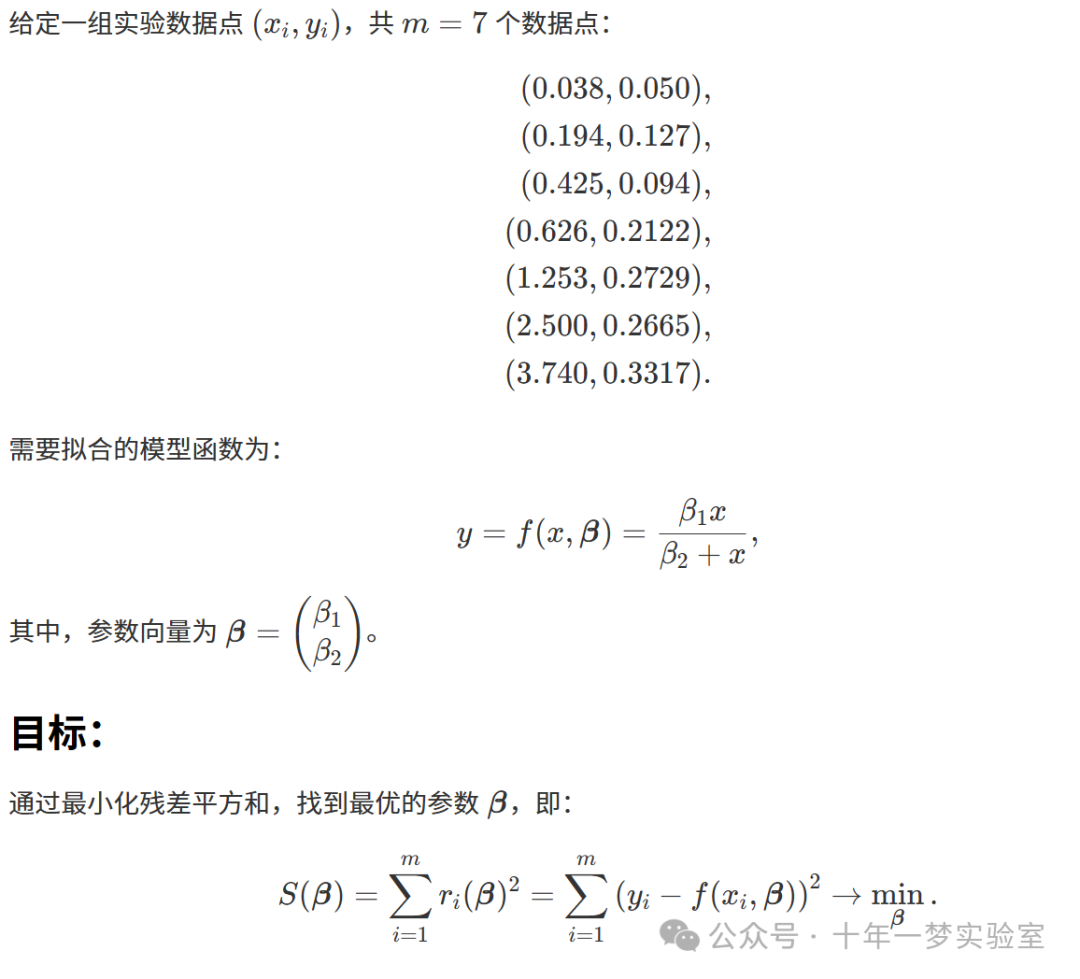
我们的目标是最小化:
S = Σ(rᵢ)²
当梯度为零时,S 取得最小值
假设我们有以下数据集:
i 1 2 3 4 5 6 7
x 0.038 0.194 0.425 0.626 1.253 2.500 3.740
y 0.050 0.127 0.094 0.2122 0.2729 0.2665 0.3317
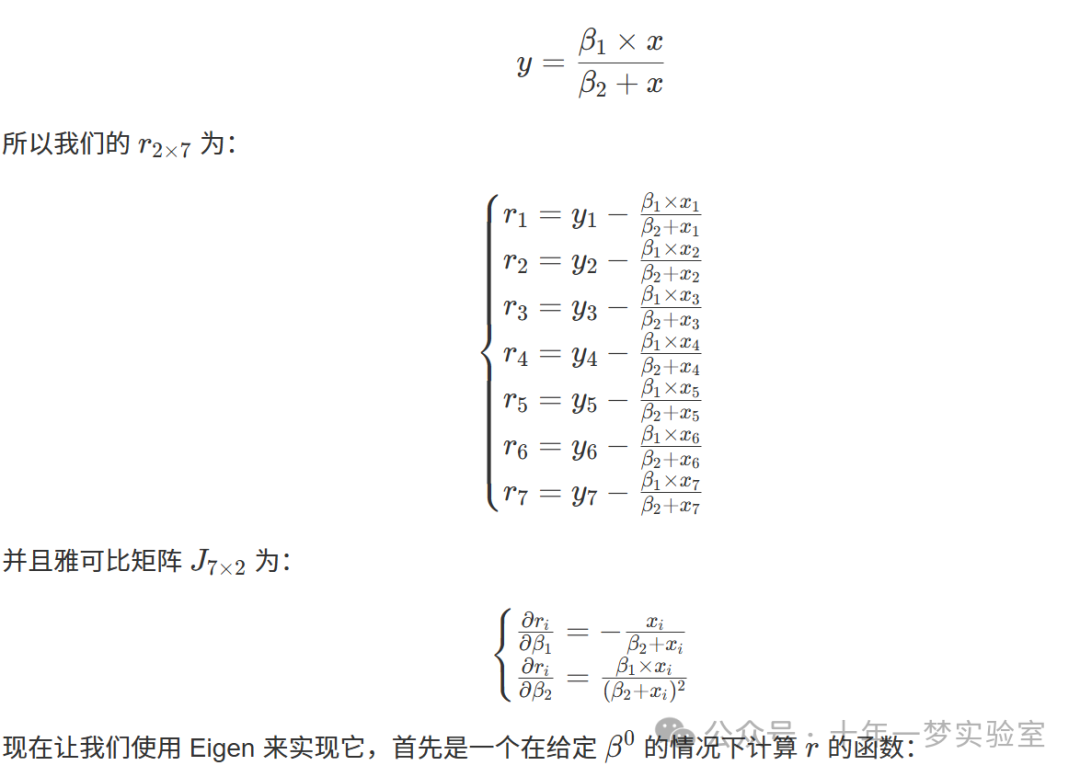
并且我们有以下函数:
y = (β₁ * x) / (β₂ + x)
因此我们的残差为:
r₁ = y₁ - (β₁ * x₁) / (β₂ + x₁)
r₂ = y₂ - (β₁ * x₂) / (β₂ + x₂)
r₃ = y₃ - (β₁ * x₃) / (β₂ + x₃)
r₄ = y₄ - (β₁ * x₄) / (β₂ + x₄)
r₅ = y₅ - (β₁ * x₅) / (β₂ + x₅)
r₆ = y₆ - (β₁ * x₆) / (β₂ + x₆)
r₇ = y₇ - (β₁ * x₇) / (β₂ + x₇)
残差向量 r(β) 长度为 7,雅可比矩阵 J 的尺寸为 7×2
偏导数:
∂rᵢ/∂β₁ = -xᵢ / (β₂ + xᵢ)
∂rᵢ/∂β₂ = (β₁ * xᵢ) / (β₂ + xᵢ)²
更新公式:
β^(k+1) = β^k - (JᵀJ)⁻¹ Jᵀ r(β^k)
*/
// 泛型仿函数模板
template<typename_Scalar,int NX = Eigen::Dynamic,int NY = Eigen::Dynamic>
structFunctor
{
// 提供给调用者的数字类型(如 double)和尺寸信息(输入/输出维度)
typedef _Scalar Scalar;
enum{
InputsAtCompileTime = NX,// 编译时确定的输入维度
ValuesAtCompileTime = NY // 编译时确定的输出维度
};
// 告诉调用者与输入、输出和雅可比有关的矩阵尺寸
typedef Eigen::Matrix<Scalar, InputsAtCompileTime,1> InputType;// 输入类型
typedef Eigen::Matrix<Scalar, ValuesAtCompileTime,1> ValueType;// 输出类型
typedef Eigen::Matrix<Scalar, ValuesAtCompileTime, InputsAtCompileTime> JacobianType;// 雅可比矩阵类型
// 输入和输出维度的本地副本
int m_inputs, m_values;
// 两个构造函数:
Functor():m_inputs(InputsAtCompileTime),m_values(ValuesAtCompileTime){}// 默认构造函数
Functor(int inputs,int values):m_inputs(inputs),m_values(values){}// 带参数的构造函数
// 获取函数输入和输出维度的方法
intinputs()const{return m_inputs;}// 返回输入维度
intvalues()const{return m_values;}// 返回输出维度
};
// 定义二维点的向量,使用Eigen的内存对齐方式
typedef std::vector<Eigen::Vector2d, Eigen::aligned_allocator<Eigen::Vector2d>> Point2DVector;
// 实现底物浓度仿函数,继承自 Functor<double>
structSubstrateConcentrationFunctor:Functor<double>
{
// 构造函数,接收数据点矩阵
SubstrateConcentrationFunctor(Eigen::MatrixXd points):Functor<double>(points.cols(), points.rows())
{
this->Points = points;// 保存数据点
}
// 重载函数调用运算符,用于计算残差
intoperator()(const Eigen::VectorXd &z, Eigen::VectorXd &r)const
{
double x_i, y_i, beta1, beta2;
for(unsignedint i =0; i <this->Points.rows();++i)
{
y_i =this->Points.row(i)(1);// 第 i 个数据点的 y 值
x_i =this->Points.row(i)(0);// 第 i 个数据点的 x 值
beta1 =z(0);// 参数 β₁
beta2 =z(1);// 参数 β₂
r(i)= y_i -(beta1 * x_i)/(beta2 + x_i);// 计算第 i 个残差
}
return0;// 返回 0 表示成功
}
Eigen::MatrixXd Points;// 存储数据点的矩阵
intinputs()const{return2;}// 模型的参数个数 β₁ 和 β₂
intvalues()const{returnthis->Points.rows();}// 观测值的数量
};
// 实现底物浓度最小二乘求解函数
voidSubstrateConcentrationLeastSquare()
{
/*
我们的数据:
x y
0.038 0.050
0.194 0.127
0.425 0.094
0.626 0.2122
1.253 0.2729
2.500 0.2665
3.740 0.3317
最后一列(第二列)是 "y"
*/
Eigen::MatrixXd points(7,2);// 创建一个 7×2 的矩阵来存放数据点
// 将数据点赋值给矩阵的每一行
points.row(0)<<0.038,0.050;
points.row(1)<<0.194,0.127;
points.row(2)<<0.425,0.094;
points.row(3)<<0.626,0.2122;
points.row(4)<<1.253,0.2729;
points.row(5)<<2.500,0.2665;
points.row(6)<<3.740,0.3317;
// 创建仿函数对象,传入数据点
SubstrateConcentrationFunctor functor(points);
// 创建数值微分对象,使用中心差分方法
Eigen::NumericalDiff<SubstrateConcentrationFunctor, Eigen::NumericalDiffMode::Central>numDiff(functor);
// 输出数据点的大小(调试信息)
std::cout <<"functor.Points.size(): "<< functor.Points.size()<< std::endl;
Eigen::VectorXd beta(2);// 定义参数向量 β,长度为 2
beta <<0.9,0.2;// 初始化 β₁ 和 β₂
Eigen::MatrixXd J(7,2);// 定义雅可比矩阵,尺寸为 7×2
numDiff.df(beta, J);// 计算在当前 β 下的雅可比矩阵
// 输出雅可比矩阵
std::cout <<"jacobian of matrix at "<<beta(0)<<","<<beta(1)<<" is:\n "<< J << std::endl;
Eigen::VectorXd r(7);// 定义残差向量,长度为 7
functor(beta, r);// 计算残差
std::cout << r << std::endl;// 输出残差向量
// 使用高斯-牛顿法进行参数迭代更新
// β^(k+1) = β^k - (JᵀJ)⁻¹ Jᵀ r(β^k)
for(int i =0; i <10; i++)
{
numDiff.df(beta, J);// 计算雅可比矩阵
std::cout <<"J: \n"<< J << std::endl;// 输出雅可比矩阵(调试信息)
functor(beta, r);// 计算残差
std::cout <<"r: \n"<< r << std::endl;// 输出残差(调试信息)
beta = beta -(J.transpose()* J).inverse()* J.transpose()* r;// 更新参数 β
}
// 输出最终的参数 β
std::cout <<"beta: \n"<< beta << std::endl;
// 最优的 β 值应该是 0.36 和 0.556
}
intmain()
{
SubstrateConcentrationLeastSquare();// 调用最小二乘求解函数
return0;// 返回 0,表示程序成功结束
}这个程序的主要功能是使用高斯-牛顿法(Gauss-Newton Algorithm)对非线性最小二乘问题进行求解,具体来说,是拟合以下形式的函数:

问题描述:
非线性回归 Non Linear Regression
1. 引言
非线性回归是一种统计方法,用于拟合包含非线性参数的模型函数,以最佳地描述数据之间的关系。在许多实际问题中,数据的关系并非线性,这时需要使用非线性模型来进行拟合。
2. 问题描述

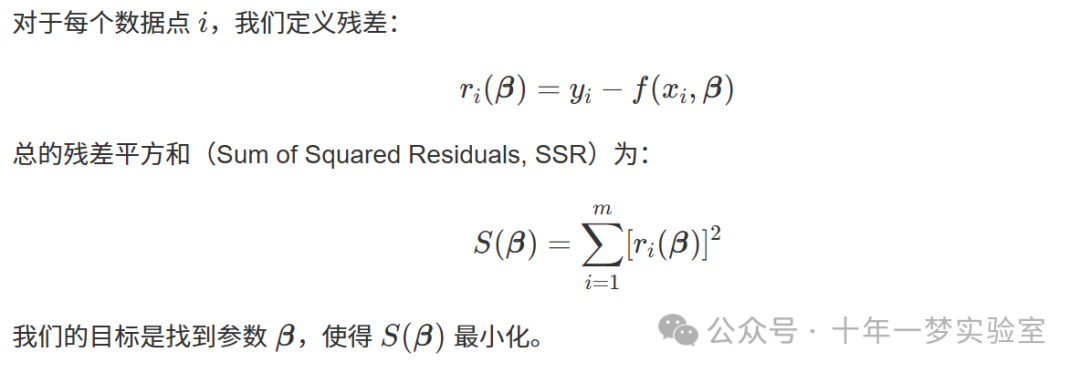
2.1 残差和目标函数
3. 高斯-牛顿算法(Gauss-Newton Algorithm)
高斯-牛顿算法是一种用于求解非线性最小二乘问题的迭代方法。它通过线性化非线性函数,迭代地更新参数估计值,逐步逼近最优解。
3.1 算法原理
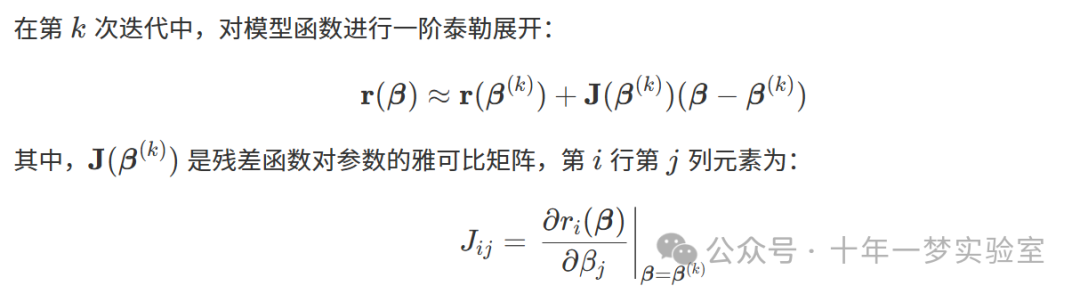
3.2 参数更新
通过最小化线性化后的残差平方和,可得参数更新公式:
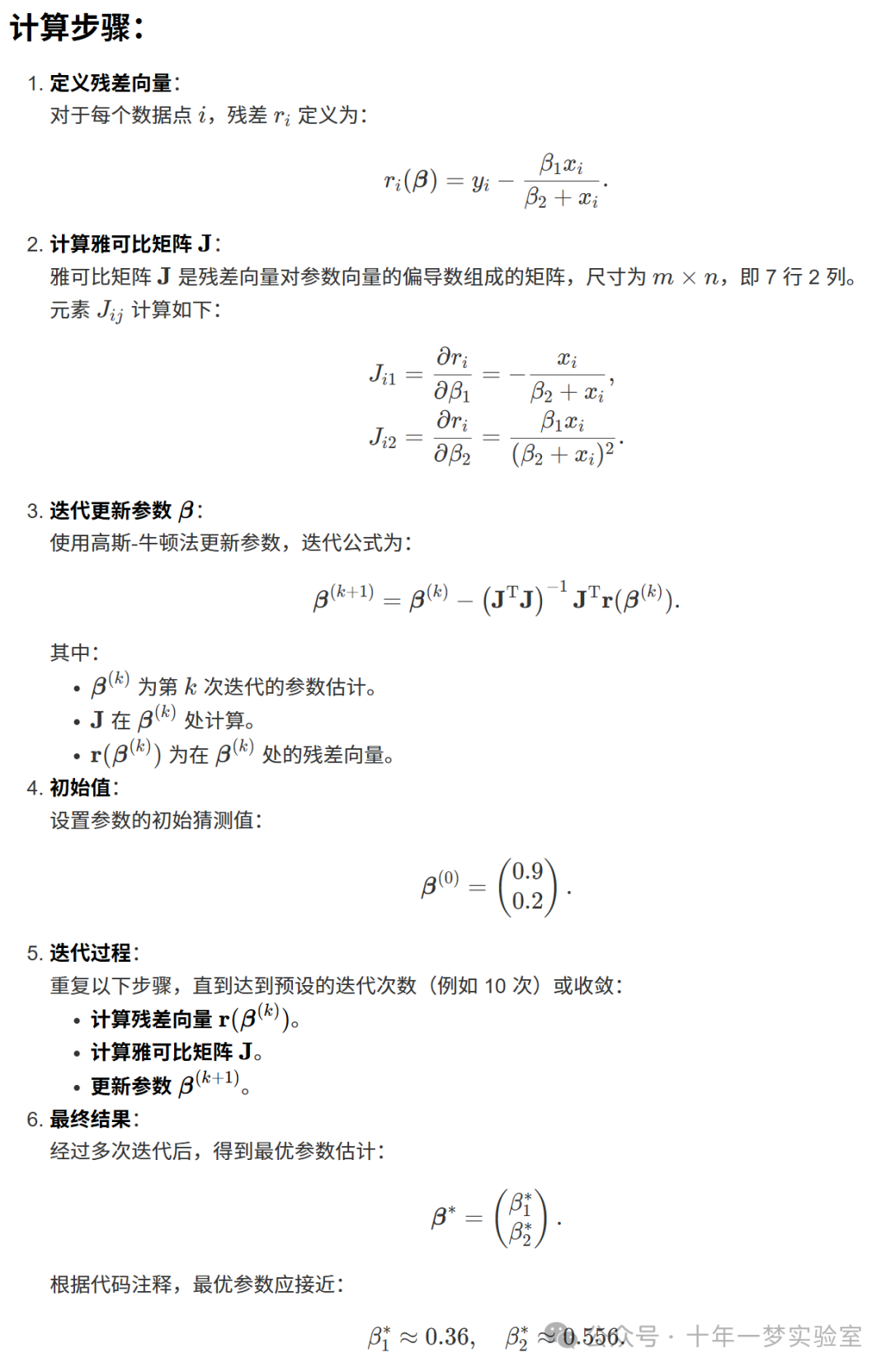
3.3 算法步骤
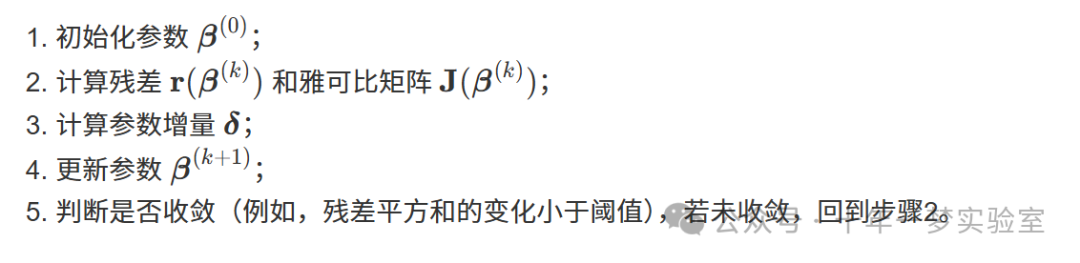
4. 示例:非线性曲线拟合
4.1 数据集
考虑以下实验数据:
| ii | xixi | yiyi |
|---|---|---|
1 | 0.038 | 0.050 |
2 | 0.194 | 0.127 |
3 | 0.425 | 0.094 |
4 | 0.626 | 0.2122 |
5 | 1.253 | 0.2729 |
6 | 2.500 | 0.2665 |
7 | 3.740 | 0.3317 |
4.2 模型函数
我们选择以下非线性模型函数:

4.3 残差和雅可比矩阵
残差函数为:
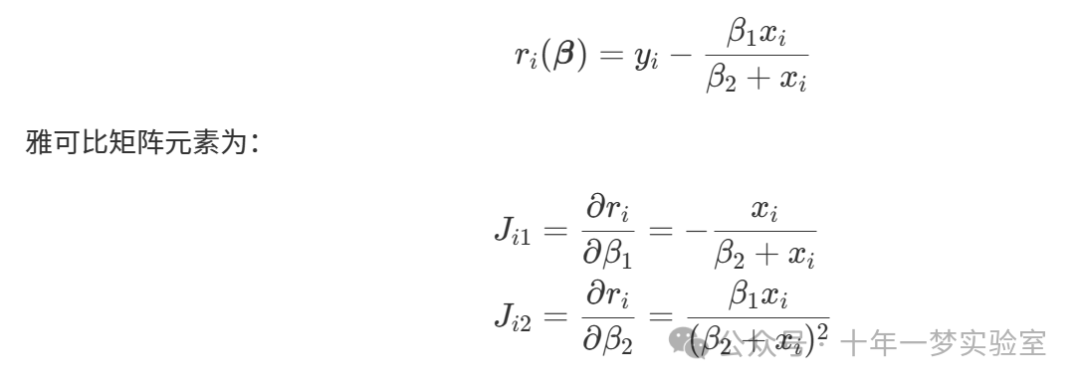
4.4 C++代码实现
4.4.1 引入库
#include <iostream>
#include <Eigen/Dense>
#include <unsupported/Eigen/NonLinearOptimization>
#include <unsupported/Eigen/NumericalDiff>4.4.2 定义泛型仿函数模板
template<typename_Scalar,int NX = Eigen::Dynamic,int NY = Eigen::Dynamic>
structFunctor
{
typedef _Scalar Scalar;
enum{ InputsAtCompileTime = NX, ValuesAtCompileTime = NY };
typedef Eigen::Matrix<Scalar, InputsAtCompileTime,1> InputType;
typedef Eigen::Matrix<Scalar, ValuesAtCompileTime,1> ValueType;
typedef Eigen::Matrix<Scalar, ValuesAtCompileTime, InputsAtCompileTime> JacobianType;
int m_inputs, m_values;
Functor():m_inputs(InputsAtCompileTime),m_values(ValuesAtCompileTime){}
Functor(int inputs,int values):m_inputs(inputs),m_values(values){}
intinputs()const{return m_inputs;}
intvalues()const{return m_values;}
};4.4.3 定义模型仿函数
struct MyFunctor:Functor<double>
{
// 构造函数,接收数据点
MyFunctor(const Eigen::VectorXd& x_data,const Eigen::VectorXd& y_data)
:Functor<double>(2, x_data.size()),x(x_data),y(y_data){}
// 计算残差向量
intoperator()(const Eigen::VectorXd &beta, Eigen::VectorXd &residuals)const
{
for(int i =0; i < y.size();++i)
{
double xi =x(i);
double yi =y(i);
double beta1 =beta(0);
double beta2 =beta(1);
double fi =(beta1 * xi)/(beta2 + xi);
residuals(i)= yi - fi;
}
return0;
}
// 数据成员
const Eigen::VectorXd x;
const Eigen::VectorXd y;
};4.4.4 主函数
int main()
{
// 初始化数据
Eigen::VectorXd x(7);
Eigen::VectorXd y(7);
x <<0.038,0.194,0.425,0.626,1.253,2.500,3.740;
y <<0.050,0.127,0.094,0.2122,0.2729,0.2665,0.3317;
// 初始参数猜测
Eigen::VectorXd beta(2);
beta <<0.9,0.2;
// 定义仿函数和数值微分
MyFunctor functor(x, y);
Eigen::NumericalDiff<MyFunctor>numDiff(functor);
// 使用Levenberg-Marquardt算法
Eigen::LevenbergMarquardt<Eigen::NumericalDiff<MyFunctor>,double>lm(numDiff);
lm.parameters.maxfev =1000;// 最大迭代次数
lm.parameters.ftol =1e-10;// 收敛阈值
// 开始优化
int info = lm.minimize(beta);
// 输出结果
std::cout <<"优化信息: "<< info << std::endl;
std::cout <<"拟合结果:"<< std::endl;
std::cout <<"beta1 = "<<beta(0)<< std::endl;
std::cout <<"beta2 = "<<beta(1)<< std::endl;
// 计算拟合曲线和残差
Eigen::VectorXd y_fit(7);
for(int i =0; i < x.size();++i)
{
y_fit(i)=(beta(0)*x(i))/(beta(1)+x(i));
std::cout <<"x: "<<x(i)<<", y: "<<y(i)<<", y_fit: "<<y_fit(i)<<", residual: "<<y(i)-y_fit(i)<< std::endl;
}
return0;
}4.4.5 代码解释
- 数据初始化
:将给定的数据点赋值给向量
x和y。 - 初始参数猜测
:设定初始的参数值
beta,需要合理选择初始值以确保算法收敛。 - 定义仿函数
:
MyFunctor用于计算残差向量。 - 数值微分
:使用
Eigen::NumericalDiff对仿函数进行数值微分,计算雅可比矩阵。 - 优化算法
:使用
Eigen::LevenbergMarquardt实现 Levenberg-Marquardt算法,这是高斯-牛顿算法的改进版,具有更好的收敛性。 - 结果输出
:输出优化结果,包括参数值和拟合曲线。
4.4.6 运行结果
运行程序后,将得到拟合参数以及各数据点的拟合值和残差。例如:
优化信息: 1
拟合结果:
beta1 = 0.362
beta2 = 0.556
x: 0.038, y: 0.05, y_fit: 0.0236, residual: 0.0264
x: 0.194, y: 0.127, y_fit: 0.0739, residual: 0.0531
...4.5 结果分析

4.6 可视化(建议)
为了更直观地理解拟合效果,可以使用绘图工具(如 MATLAB、Python 的 Matplotlib)将原始数据点和拟合曲线绘制出来。
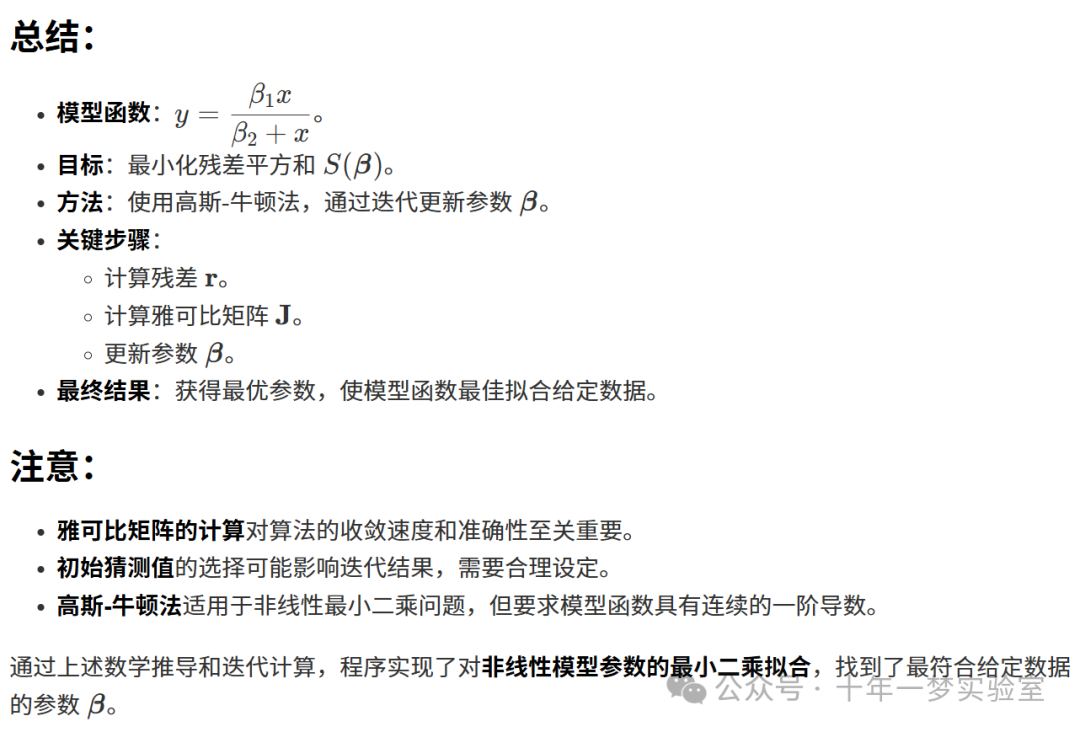
5. 总结
在本教程中,我们深入探讨了非线性回归的基本原理,特别是高斯-牛顿算法的应用。通过具体的代码实现,我们了解了如何使用 C++ 和 Eigen 库来拟合非线性模型,并解决实际问题。
关键要点:
- 残差函数和目标函数
:通过定义残差,建立最小化问题。
- 雅可比矩阵的计算
:雅可比矩阵在参数更新中起核心作用。
- 优化算法的选择
:高斯-牛顿算法适用于非线性最小二乘问题,Levenberg-Marquardt算法在此基础上进行了改进。
- 初始猜测的重要性
:初始参数选择得当,有助于算法更快、更准确地收敛。
6. 进一步阅读
- 非线性优化方法
:除了高斯-牛顿、Levenberg-Marquardt算法,还有信赖域方法、共轭梯度法等。
- 模型复杂性
:对于更复杂的模型,可能需要解析计算雅可比矩阵或使用更高级的优化技术。
- 实际应用
:非线性回归在物理、生物、经济等领域有广泛应用,深入研究可以帮助解决更复杂的实际问题。
附录:完整代码
#include <iostream>
#include <Eigen/Dense>
#include <unsupported/Eigen/NonLinearOptimization>
#include <unsupported/Eigen/NumericalDiff>
// 泛型仿函数模板
template<typename_Scalar,int NX = Eigen::Dynamic,int NY = Eigen::Dynamic>
structFunctor
{
typedef _Scalar Scalar;
enum{ InputsAtCompileTime = NX, ValuesAtCompileTime = NY };
typedef Eigen::Matrix<Scalar, InputsAtCompileTime,1> InputType;
typedef Eigen::Matrix<Scalar, ValuesAtCompileTime,1> ValueType;
typedef Eigen::Matrix<Scalar, ValuesAtCompileTime, InputsAtCompileTime> JacobianType;
int m_inputs, m_values;
Functor():m_inputs(InputsAtCompileTime),m_values(ValuesAtCompileTime){}
Functor(int inputs,int values):m_inputs(inputs),m_values(values){}
intinputs()const{return m_inputs;}
intvalues()const{return m_values;}
};
// 定义模型仿函数
structMyFunctor:Functor<double>
{
MyFunctor(const Eigen::VectorXd& x_data,const Eigen::VectorXd& y_data)
:Functor<double>(2, x_data.size()),x(x_data),y(y_data){}
intoperator()(const Eigen::VectorXd &beta, Eigen::VectorXd &residuals)const
{
for(int i =0; i < y.size();++i)
{
double xi =x(i);
double yi =y(i);
double beta1 =beta(0);
double beta2 =beta(1);
double fi =(beta1 * xi)/(beta2 + xi);
residuals(i)= yi - fi;
}
return0;
}
const Eigen::VectorXd x;
const Eigen::VectorXd y;
};
intmain()
{
// 初始化数据
Eigen::VectorXd x(7);
Eigen::VectorXd y(7);
x <<0.038,0.194,0.425,0.626,1.253,2.500,3.740;
y <<0.050,0.127,0.094,0.2122,0.2729,0.2665,0.3317;
// 初始参数猜测
Eigen::VectorXd beta(2);
beta <<0.9,0.2;
// 定义仿函数和数值微分
MyFunctor functor(x, y);
Eigen::NumericalDiff<MyFunctor>numDiff(functor);
// 使用Levenberg-Marquardt算法
Eigen::LevenbergMarquardt<Eigen::NumericalDiff<MyFunctor>,double>lm(numDiff);
lm.parameters.maxfev =1000;// 最大迭代次数
lm.parameters.ftol =1e-10;// 收敛阈值
// 开始优化
int info = lm.minimize(beta);
// 输出结果
std::cout <<"优化信息: "<< info << std::endl;
std::cout <<"拟合结果:"<< std::endl;
std::cout <<"beta1 = "<<beta(0)<< std::endl;
std::cout <<"beta2 = "<<beta(1)<< std::endl;
// 计算拟合曲线和残差
Eigen::VectorXd y_fit(7);
for(int i =0; i < x.size();++i)
{
y_fit(i)=(beta(0)*x(i))/(beta(1)+x(i));
std::cout <<"x: "<<x(i)<<", y: "<<y(i)<<", y_fit: "<<y_fit(i)<<", residual: "<<y(i)-y_fit(i)<< std::endl;
}
return0;
}非线性回归与非线性拟合的区别
非线性回归和非线性拟合虽然都涉及将非线性模型应用于数据,但在概念、目的和应用上存在一些重要的区别。理解这些差异有助于我们在实际问题中选择最合适的方法。
非线性回归
非线性回归是一种统计分析方法,用于建立因变量与一个或多个自变量之间的非线性关系。其核心目标是估计模型参数,并对这些参数进行统计推断,如置信区间估计和显著性检验。非线性回归通常依赖于一些统计假设,例如误差项服从正态分布,具有恒定方差等。
特点:
- 统计模型构建
:建立明确的数学模型,其中参数以非线性方式出现。
- 参数估计和推断
:关注参数的准确估计,并对其进行统计解释。
- 误差分析
:对残差进行分析,以验证模型的适用性和可靠性。
应用示例:
- 生物统计学
:使用Logistic回归模型分析生存数据。
- 经济学
:利用非线性回归预测经济指标,如供求关系中的非线性效应。
- 化学动力学
:拟合化学反应速率方程,估计反应速率常数。
非线性拟合
非线性拟合是一种数值方法,用于找到一个非线性函数,使其尽可能贴合给定的数据集。与非线性回归不同,非线性拟合不强调统计推断,而是注重模型对数据的逼近能力。它主要利用优化算法最小化误差,但不一定遵循统计假设。
特点:
- 数据逼近
:关注模型对数据的良好拟合,而非对参数的统计意义。
- 灵活性高
:可以使用各种非线性模型,无需满足严格的统计条件。
- 应用广泛
:在工程、物理和计算机科学等领域用于曲线拟合和模式识别。
应用示例:
- 信号处理
:对测量数据进行平滑,消除噪声。
- 计算机视觉
:拟合边缘或轮廓以识别物体形状。
- 机械工程
:拟合实验数据以预测机械部件在不同条件下的性能。
核心区别
目的和焦点不同:
- 非线性回归
:旨在建立解释性的统计模型,重视参数的估计和推断,以及模型的内在机制。
- 非线性拟合
:侧重于找到最佳拟合函数,关注模型对数据的逼近和预测性能。
统计假设和推断:
- 非线性回归
:基于统计假设,可以进行假设检验、置信区间估计等。
- 非线性拟合
:不需要统计假设,参数主要用于模型拟合,无需进行统计推断。
应用领域和灵活性:
- 非线性回归
:多用于科学研究和需要解释变量关系的领域。
- 非线性拟合
:应用于更广泛的工程和技术领域,灵活性更高。
举例说明
场景一:医学研究
一位医生想研究某种药物剂量与患者反应之间的关系,以确定最佳剂量。
- 选择非线性回归
,因为需要建立一个统计模型,对参数进行估计和检验,从而得到可靠的医学结论。
场景二:图像处理
工程师需要对一组散点数据进行曲线拟合,以平滑噪声数据并用于后续处理。
- 选择非线性拟合
,因为主要目的是找到一个能够最好地表示数据趋势的函数,对参数的统计性质并不关心。
总结
非线性回归:
适用于需要解释变量关系、估计参数并进行统计推断的场景。
基于统计模型,有明确的假设和推断过程。
非线性拟合:
适用于需要快速、准确地拟合数据,但对参数解释无要求的场合。
更加灵活,不受统计假设限制,注重模型的逼近能力。
在实际应用中,选择非线性回归还是非线性拟合,取决于你的目的和需求。如果你需要对参数进行深入的统计分析,理解模型背后的机制,非线性回归是合适的工具。如果你更关注数据的拟合效果和预测能力,非线性拟合可能更为适用。
理解两者的区别,能够帮助你在数据分析和模型选择中做出更明智的决策。
列文伯格 - 马夸尔特算法
列文伯格 - 马夸尔特算法,又称阻尼最小二乘法(DLS),用于求解非线性最小二乘问题。该算法主要应用于许多曲线拟合问题。
列文伯格 - 马夸尔特算法只能找到局部最小值(可能不是全局最小值)。它在高斯 - 牛顿算法和梯度下降法之间进行插值。该算法比高斯 - 牛顿算法更稳健,这意味着在许多情况下,即使起始点距离最终最小值很远,它也能找到一个解。对于表现良好的函数和合理的起始参数,列文伯格 - 马夸尔特算法往往比高斯 - 牛顿算法慢。它也可以被视为使用信赖域方法的高斯 - 牛顿算法。
这段代码演示了如何使用 Eigen 库中的 Levenberg-Marquardt 算法进行非线性最小二乘优化。它包含了四个不同的例子,每个例子都展示了如何使用该算法拟合不同的函数。
代码概述:
Functor结构体: 这是一个通用的仿函数模板,用于表示需要优化的目标函数。它定义了输入和输出的类型和大小,以及计算函数值和雅可比矩阵的接口。SimpleLineFunctor和SimpleLineFunctorNumericalDiff:SimpleLineFunctor实现了拟合直线y = ax + b的目标函数。SimpleLineFunctorNumericalDiff使用数值微分来计算雅可比矩阵。GeneratePoints函数用于生成带噪声的线性数据点。QuadraticFunctor: 实现了拟合二次曲线y = ax² + bx + c的目标函数。 它使用数值微分计算雅可比矩阵。quadraticPointsGenerator函数生成带噪声的二次曲线数据点。BoothFunctor: 实现了 Booth 函数的优化,这是一个二维的测试函数。HimmelblauFunctor: 实现了 Himmelblau 函数的优化,这也是一个二维的测试函数。testSimpleLineFunctor,testQuadraticFunctor,testBoothFunctor和testHimmelblauFunctor: 这些函数分别测试了上述不同的目标函数。它们首先生成一些数据点,然后使用Eigen::LevenbergMarquardt类来执行 Levenberg-Marquardt 优化。 每个测试函数都输出了优化结果,包括优化的参数值以及优化状态。main函数: 调用了所有测试函数。
代码核心:
使用 Eigen 库进行矩阵和向量运算。
使用
Eigen::LevenbergMarquardt类实现 Levenberg-Marquardt 优化算法。使用数值微分计算雅可比矩阵。
演示了如何定义和使用仿函数来表示目标函数。
总结:
这段代码演示了如何使用 Eigen 库进行非线性最小二乘拟合。它通过四个例子展示了如何使用 Levenberg-Marquardt 算法拟合直线、二次曲线以及两个经典的二维测试函数 (Booth 函数和 Himmelblau 函数)。代码中定义了一个通用的仿函数模板 Functor,用于表示需要优化的目标函数。每个例子都包含了生成带噪声数据点的函数,以及使用 Eigen::LevenbergMarquardt 类进行优化的过程。代码还演示了如何使用数值微分来计算雅可比矩阵。最后,main 函数调用了所有测试函数,展示了优化的结果。 这段代码对于学习如何使用 Eigen 库进行非线性最小二乘优化非常有帮助。
#include <iostream> // 包含标准输入输出库
#include <Eigen/Dense> // 包含Eigen库的密集矩阵运算头文件
#include <unsupported/Eigen/NonLinearOptimization> // 包含Eigen库不受支持的非线性优化功能头文件
#include <unsupported/Eigen/NumericalDiff> // 包含Eigen库不受支持的数值微分功能头文件
// 泛型仿函数模板
template<typename_Scalar,int NX = Eigen::Dynamic,int NY = Eigen::Dynamic>
structFunctor
{
// 提供给调用者的数值类型(例如:double)和尺寸(输入/输出维度)信息
typedef _Scalar Scalar;
enum{
InputsAtCompileTime = NX,
ValuesAtCompileTime = NY
};
// 告诉调用者输入、输出和雅可比矩阵相关的矩阵尺寸
typedef Eigen::Matrix<Scalar,InputsAtCompileTime,1> InputType;
typedef Eigen::Matrix<Scalar,ValuesAtCompileTime,1> ValueType;
typedef Eigen::Matrix<Scalar,ValuesAtCompileTime,InputsAtCompileTime> JacobianType;
// 输入和输出维度的本地副本
int m_inputs, m_values;
// 两个构造函数
Functor():m_inputs(InputsAtCompileTime),m_values(ValuesAtCompileTime){}
Functor(int inputs,int values):m_inputs(inputs),m_values(values){}
// 获取函数输入和输出维度的方法
intinputs()const{return m_inputs;}
intvalues()const{return m_values;}
};
///////////////////////// Levenberg Marquardt 示例 (1) f(x) = a x + b ///////////////////////////////
typedef std::vector<Eigen::Vector2d,Eigen::aligned_allocator<Eigen::Vector2d>> Point2DVector;
Point2DVector GeneratePoints();// 声明生成点的函数
// 定义用于线性模型的仿函数
structSimpleLineFunctor:Functor<double>
{
// 重载函数调用运算符,用于计算残差
intoperator()(const Eigen::VectorXd &z, Eigen::VectorXd &fvec)const
{
// 模型中的 "a" 是 z(0),"b" 是 z(1)
double x_i, y_i, a, b;
for(unsignedint i =0; i <this->Points.size();++i)
{
y_i =this->Points[i](1);// 第 i 个数据点的 y 值
x_i =this->Points[i](0);// 第 i 个数据点的 x 值
a =z(0);// 参数 a
b =z(1);// 参数 b
fvec(i)= y_i -(a * x_i + b);// 计算第 i 个残差
}
return0;// 返回 0 表示成功
}
Point2DVector Points;// 存储数据点的向量
intinputs()const{return2;}// 模型有两个参数
intvalues()const{returnthis->Points.size();}// 观测值的数量
};
// 使用数值微分计算雅可比矩阵
structSimpleLineFunctorNumericalDiff:Eigen::NumericalDiff<SimpleLineFunctor>{};
Point2DVector GeneratePoints(constunsignedint numberOfPoints)
{
Point2DVector points;
// 模型 y = 2*x + 5 加上一些噪声(结果应该接近 (2,5))
for(unsignedint i =0; i < numberOfPoints;++i)
{
double x =static_cast<double>(i);
Eigen::Vector2d point;
point(0)= x;
point(1)=2.0* x +5.0+drand48()/10.0;// 添加噪声
points.push_back(point);
}
return points;// 返回生成的点
}
voidtestSimpleLineFunctor()
{
std::cout <<"Testing f(x) = a x + b function..."<< std::endl;
unsignedint numberOfPoints =50;
Point2DVector points =GeneratePoints(numberOfPoints);// 生成 50 个点
Eigen::VectorXd x(2);
x.fill(2.0f);// 初始化参数
SimpleLineFunctorNumericalDiff functor;
functor.Points = points;// 设置数据点
Eigen::LevenbergMarquardt<SimpleLineFunctorNumericalDiff>lm(functor);// 创建Levenberg-Marquardt优化器
Eigen::LevenbergMarquardtSpace::Status status = lm.minimize(x);// 最小化误差
std::cout <<"status: "<< status << std::endl;
std::cout <<"x that minimizes the function: "<< std::endl << x << std::endl;// 输出优化后的参数
std::cout <<"lm.parameters.epsfcn: "<< lm.parameters.epsfcn << std::endl;
std::cout <<"lm.parameters.factor: "<< lm.parameters.factor << std::endl;
std::cout <<"lm.parameters.ftol: "<< lm.parameters.ftol << std::endl;
std::cout <<"lm.parameters.gtol: "<< lm.parameters.gtol << std::endl;
std::cout <<"lm.parameters.maxfev: "<< lm.parameters.maxfev << std::endl;
std::cout <<"lm.parameters.xtol: "<< lm.parameters.xtol << std::endl;
std::cout <<"~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~"<< std::endl;
}
///////////////////////// Levenberg Marquardt 示例 (2) f(x) = ax² + bx + c ///////////////////////////////
// 参考链接:https://medium.com/@sarvagya.vaish/levenberg-marquardt-optimization-part-2-5a71f7db27a0
// 定义用于二次模型的仿函数
structQuadraticFunctor
{
// 计算每个数据点的误差,对于给定的参数值
intoperator()(const Eigen::VectorXd &x, Eigen::VectorXd &fvec)const
{
// 'x' 的维度为 n x 1,包含当前参数估计值
// 'fvec' 的维度为 m x 1,将包含每个数据点的误差
double aParam =x(0);// 参数 a
double bParam =x(1);// 参数 b
double cParam =x(2);// 参数 c
for(int i =0; i <values(); i++)
{
double xValue =measuredValues(i,0);// 第 i 个数据点的 x 值
double yValue =measuredValues(i,1);// 第 i 个数据点的 y 值
fvec(i)= yValue -(aParam * xValue * xValue + bParam * xValue + cParam);// 计算误差
}
}
// 计算误差的雅可比矩阵
intdf(const Eigen::VectorXd &x, Eigen::MatrixXd &fjac)const
{
// 'x' 的维度为 n x 1,包含当前参数估计值
// 'fjac' 的维度为 m x n,将包含误差的雅可比矩阵,数值计算
float epsilon;
epsilon =1e-5f;// 微小变化量
for(int i =0; i < x.size(); i++)
{
Eigen::VectorXd xPlus(x);
xPlus(i)+= epsilon;// 正方向微小变化
Eigen::VectorXd xMinus(x);
xMinus(i)-= epsilon;// 负方向微小变化
Eigen::VectorXd fvecPlus(values());
operator()(xPlus, fvecPlus);// 计算正方向的误差
Eigen::VectorXd fvecMinus(values());
operator()(xMinus, fvecMinus);// 计算负方向的误差
Eigen::VectorXd fvecDiff(values());
fvecDiff =(fvecPlus - fvecMinus)/(2.0f* epsilon);// 差分计算
fjac.block(0, i,values(),1)= fvecDiff;// 设置雅可比矩阵的第 i 列
}
}
int m;// 数据点数量
intvalues()const{return m;}// 返回数据点数量
int n;// 参数数量
intinputs()const{return n;}// 返回参数数量
Eigen::MatrixXd measuredValues;// 存储数据点的矩阵
};
voidquadraticPointsGenerator(std::vector<double>&x_values, std::vector<double>&y_values,double a=-1,double b=0.6,double c=2,unsignedint numberOfPoints=50)
{
// 生成数据点范围 x_start=-4 到 x_end=3
double x_start =-4;
double x_end =3;
double x, y;
for(unsignedint i =0; i < numberOfPoints;++i)
{
x = x_start +static_cast<double>(i)*(x_end - x_start)/ numberOfPoints;// 等间距生成x值
y = a *pow(x,2)+ b * x + c +drand48()/10.0;// 根据二次方程生成y值并添加噪声
x_values.push_back(x);// 将x值添加到向量
y_values.push_back(y);// 将y值添加到向量
}
}
voidtestQuadraticFunctor()
{
std::cout <<"Testing the f(x) = ax² + bx + c function..."<< std::endl;
std::vector<double> x_values;
std::vector<double> y_values;
double a =-1;// 设置实际参数 a
double b =0.6;// 设置实际参数 b
double c =2;// 设置实际参数 c
quadraticPointsGenerator(x_values, y_values, a, b, c);// 生成数据点
int m = x_values.size();// 数据点数量
// 将数据移动到Eigen矩阵中
// 第一列为x值,第二列为f(x)值
Eigen::MatrixXd measuredValues(m,2);
for(int i =0; i < m; i++){
measuredValues(i,0)= x_values[i];
measuredValues(i,1)= y_values[i];
}
int n =3;// 参数数量
// 参数向量包含参数的初始值
// 在LM优化的上下文中,参数向量被称为输入,但不要与x值混淆
Eigen::VectorXd parameters(n);
parameters(0)=0.0;// 参数 a 的初始值
parameters(1)=0.0;// 参数 b 的初始值
parameters(2)=0.0;// 参数 c 的初始值
// 运行LM优化
// 创建LevenbergMarquardt对象并传入仿函数
QuadraticFunctor functor;
functor.measuredValues = measuredValues;
functor.m = m;
functor.n = n;
Eigen::LevenbergMarquardt<QuadraticFunctor,double>lm(functor);
int status = lm.minimize(parameters);
std::cout <<"LM optimization status: "<< status << std::endl;
// 输出优化结果
std::cout <<"Optimization results"<< std::endl;
std::cout <<"\ta: "<<parameters(0)<< std::endl;
std::cout <<"\tb: "<<parameters(1)<< std::endl;
std::cout <<"\tc: "<<parameters(2)<< std::endl;
// 输出实际参数值
std::cout <<"Actual values are"<< std::endl;
std::cout <<"\ta: "<< a << std::endl;
std::cout <<"\tb: "<< b << std::endl;
std::cout <<"\tc: "<< c << std::endl;
std::cout <<"~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~"<< std::endl;
}
///////////////////////// Levenberg Marquardt 示例 (3) f(x,y) = (x + 2*y -7)^2 + (2*x + y - 5)^2 ///////////////////////////////
// https://en.wikipedia.org/wiki/Test_functions_for_optimization
// Booth 函数
// 实现 f(x,y) = (x + 2*y -7)^2 + (2*x + y - 5)^2
structBoothFunctor:Functor<double>
{
// 简单的构造函数
BoothFunctor():Functor<double>(2,2){}
// 目标函数的实现
intoperator()(const Eigen::VectorXd &z, Eigen::VectorXd &fvec)const
{
double x =z(0); double y =z(1);
/*
* 计算 Booth 函数。
* 重要:LevenbergMarquardt 设计用于处理目标函数是平方和的情况。算法会考虑到这一点:不要自己计算平方和。
* 换句话说:objFun = sum(fvec(i)^2)
*/
fvec(0)= x +2*y -7;
fvec(1)=2*x + y -5;
return0;
}
};
// 测试 Booth 函数的仿函数
voidtestBoothFunctor(){
std::cout <<"Testing the f(x,y) = (x + 2*y -7)^2 + (2*x + y - 5)^2 function..."<< std::endl;
Eigen::VectorXd zInit(2); zInit <<1.87,2.032;// 初始化参数
std::cout <<"zInit: "<< zInit.transpose()<< std::endl;
Eigen::VectorXd zSoln(2); zSoln <<1.0,3.0;// 预期解
std::cout <<"zSoln: "<< zSoln.transpose()<< std::endl;
BoothFunctor functor;// 创建仿函数对象
Eigen::NumericalDiff<BoothFunctor>numDiff(functor);// 创建数值微分对象
Eigen::LevenbergMarquardt<Eigen::NumericalDiff<BoothFunctor>,double>lm(numDiff);// 创建LM优化器
lm.parameters.maxfev =1000;// 最大函数评估次数
lm.parameters.xtol =1.0e-10;// 收敛阈值
std::cout <<"max fun eval: "<< lm.parameters.maxfev << std::endl;
std::cout <<"x tol: "<< lm.parameters.xtol << std::endl;
Eigen::VectorXd z = zInit;// 初始化参数
int ret = lm.minimize(z);// 最小化误差
std::cout <<"iter count: "<< lm.iter << std::endl;
std::cout <<"return status: "<< ret << std::endl;
std::cout <<"zSolver: "<< z.transpose()<< std::endl;
std::cout <<"~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~"<< std::endl;
}
///////////////////////// Levenberg Marquardt 示例 (4) f(x,y) = (x^2 + y - 11)^2 + (x + y^2 - 7)^2 ///////////////////////////////
// https://en.wikipedia.org/wiki/Test_functions_for_optimization
// Himmelblau 函数
// 实现 f(x,y) = (x^2 + y - 11)^2 + (x + y^2 - 7)^2
structHimmelblauFunctor:Functor<double>
{
// 简单的构造函数
HimmelblauFunctor():Functor<double>(2,2){}
// 目标函数的实现
intoperator()(const Eigen::VectorXd &z, Eigen::VectorXd &fvec)const
{
double x =z(0); double y =z(1);
/*
* 计算 Himmelblau 函数。
* 重要:LevenbergMarquardt 设计用于处理目标函数是平方和的情况。算法会考虑到这一点:不要自己计算平方和。
* 换句话说:objFun = sum(fvec(i)^2)
*/
fvec(0)= x * x + y -11;
fvec(1)= x + y * y -7;
return0;
}
};
// 测试 Himmelblau 函数的仿函数
voidtestHimmelblauFunctor()
{
std::cout <<"Testing f(x,y) = (x^2 + y - 11)^2 + (x + y^2 - 7)^2 function..."<< std::endl;
// Eigen::VectorXd zInit(2); zInit << 0.0, 0.0; // 解决方案 1
// Eigen::VectorXd zInit(2); zInit << -1, 1; // 解决方案 2
// Eigen::VectorXd zInit(2); zInit << -1, -1; // 解决方案 3
Eigen::VectorXd zInit(2); zInit <<1,-1;// 解决方案 4
std::cout <<"zInit: "<< zInit.transpose()<< std::endl;
std::cout <<"soln 1: [3.0, 2.0]"<< std::endl;
std::cout <<"soln 2: [-2.805118, 3.131312]"<< std::endl;
std::cout <<"soln 3: [-3.77931, -3.28316]"<< std::endl;
std::cout <<"soln 4: [3.584428, -1.848126]"<< std::endl;
HimmelblauFunctor functor;// 创建仿函数对象
Eigen::NumericalDiff<HimmelblauFunctor>numDiff(functor);// 创建数值微分对象
Eigen::LevenbergMarquardt<Eigen::NumericalDiff<HimmelblauFunctor>,double>lm(numDiff);// 创建LM优化器
lm.parameters.maxfev =1000;// 最大函数评估次数
lm.parameters.xtol =1.0e-10;// 收敛阈值
std::cout <<"max fun eval: "<< lm.parameters.maxfev << std::endl;
std::cout <<"x tol: "<< lm.parameters.xtol << std::endl;
Eigen::VectorXd z = zInit;// 初始化参数
int ret = lm.minimize(z);// 最小化误差
std::cout <<"iter count: "<< lm.iter << std::endl;
std::cout <<"return status: "<< ret << std::endl;
std::cout <<"zSolver: "<< z.transpose()<< std::endl;
std::cout <<"~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~"<< std::endl;
}
intmain()
{
testSimpleLineFunctor();// 测试线性函数
testQuadraticFunctor();// 测试二次函数
testBoothFunctor();// 测试 Booth 函数
testHimmelblauFunctor();// 测试 Himmelblau 函数
return0;// 返回 0 表示程序成功结束
}
/*
Refs
https://github.com/daviddoria/Examples/blob/master/c%2B%2B/Eigen/LevenbergMarquardt/CurveFitting.cpp
https://stackoverflow.com/questions/18509228/how-to-use-the-eigen-unsupported-levenberg-marquardt-implementation
https://stackoverflow.com/questions/48213584/understanding-levenberg-marquardt-enumeration-returns
https://www.ultimatepp.org/reference$Eigen_demo$en-us.html
https://ethz-adrl.github.io/ct/ct_doc/doc/html/core_tut_linearization.html
https://robotics.stackexchange.com/questions/20673/why-with-the-pseudo-inverse-it-is-possible-to-invert-the-jacobian-matrix-even-in
http://users.ics.forth.gr/~lourakis/
https://mathoverflow.net/questions/257699/gauss-newton-vs-gradient-descent-vs-levenberg-marquadt-for-least-squared-method
https://math.stackexchange.com/questions/1085436/gauss-newton-versus-gradient-descent
https://stackoverflow.com/questions/34701160/how-to-set-levenberg-marquardt-damping-using-eigen
http://www.netlib.org/minpack/lmder.f
https://en.wikipedia.org/wiki/Test_functions_for_optimization
https://github.com/daviddoria/Examples/blob/master/c%2B%2B/Eigen/LevenbergMarquardt/NumericalDerivative.cpp
https://stackoverflow.com/questions/18509228/how-to-use-the-eigen-unsupported-levenberg-marquardt-implementation
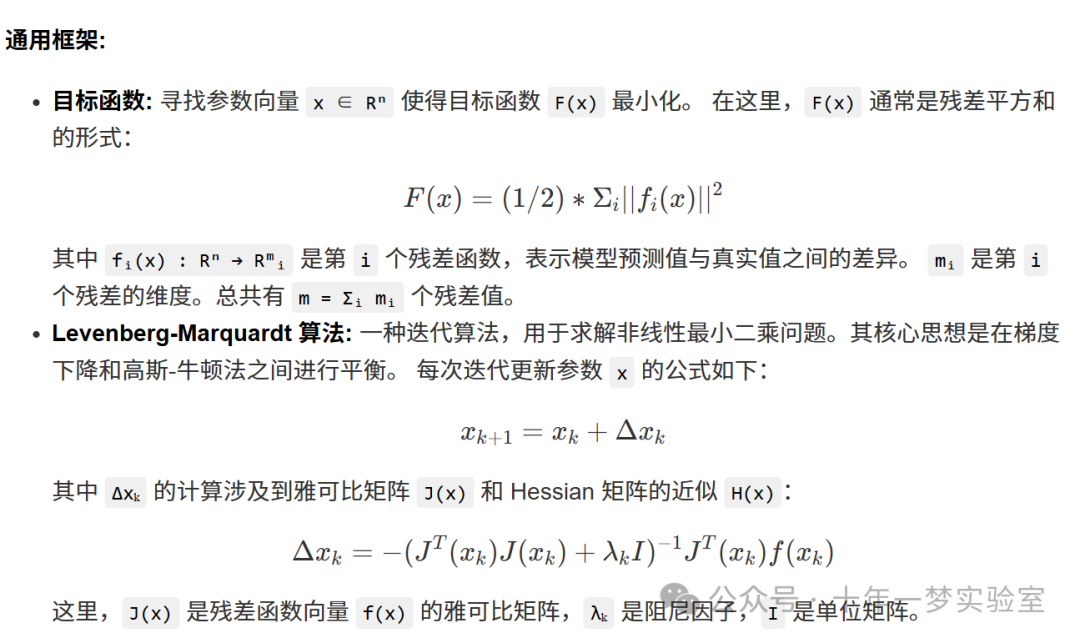
*/这段代码演示了如何使用 Eigen 库的 Levenberg-Marquardt 算法进行非线性最小二乘优化,通过四个例子展示了不同的函数拟合。下面用数学符号进行总结:
具体例子:
线性拟合 (
y = ax + b):
x = [a, b]ᵀ(待优化参数)
fᵢ(x) = yᵢ - (axᵢ + b)(残差函数)
目标函数:
F(x) = (1/2) * Σᵢ (yᵢ - (axᵢ + b))²
二次曲线拟合 (y = ax² + bx + c):
x = [a, b, c]ᵀ(待优化参数)
fᵢ(x) = yᵢ - (axᵢ² + bxᵢ + c)(残差函数)
目标函数:
F(x) = (1/2) * Σᵢ (yᵢ - (axᵢ² + bxᵢ + c))²
Booth 函数:
x = [x, y]ᵀ(待优化参数)
f₁(x) = x + 2y - 7f₂(x) = 2x + y - 5目标函数:
F(x) = (1/2) * (f₁(x)² + f₂(x)²) = (1/2) * ((x + 2y - 7)² + (2x + y - 5)²)
Himmelblau 函数:
x = [x, y]ᵀ(待优化参数)
f₁(x) = x² + y - 11f₂(x) = x + y² - 7目标函数:
F(x) = (1/2) * (f₁(x)² + f₂(x)²) = (1/2) * ((x² + y - 11)² + (x + y² - 7)²)
总结:
这段代码通过 Eigen 库实现了 Levenberg-Marquardt 算法,用于解决不同形式的非线性最小二乘问题。每个例子都定义了相应的残差函数 fᵢ(x),并通过最小化残差平方和来优化参数 x。 代码中使用了数值微分来计算雅可比矩阵。

















 3041
3041

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









