



在这个演示中,我们展示了一个简单的演示机器人,包含从发布关节状态到发布虚假激光数据再到在 RViz 中可视化机器人模型的所有组件。
启动演示
我们假设您的 ROS 2 安装目录为 ~/ros2_ws 。请根据您的平台更改目录。
要启动演示,我们执行演示启动文件,我们将在下一节中详细解释。
源码构建:
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone -b ${ROS_DISTRO} https://github.com/ros2/demos
cd .. && colcon build –packages-up-to dummy_robot_bringup
source ~/ros2_ws/install/setup.bash
ros2 launch dummy_robot_bringup dummy_robot_bringup_launch.pycxy@cxy-Ubuntu2404:~/second_ros2_ws$ ros2 launch dummy_robot_bringup dummy_robot_bringup_launch.py
[INFO] [launch]: All log files can be found below /home/cxy/.ros/log/2024-07-25-14-00-29-377480-cxy-Ubuntu2404-194696
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [dummy_map_server-1]: process started with pid [194699]
[INFO] [robot_state_publisher-2]: process started with pid [194700]
[INFO] [dummy_joint_states-3]: process started with pid [194701]
[INFO] [dummy_laser-4]: process started with pid [194702]
[dummy_laser-4] [INFO] [1721887229.677420145] [dummy_laser]: angle inc: 0.004363
[dummy_laser-4] [INFO] [1721887229.677495680] [dummy_laser]: scan size: 1081
[dummy_laser-4] [INFO] [1721887229.677505147] [dummy_laser]: scan time increment: 0.000000
[robot_state_publisher-2] [INFO] [1721887230.335038334] [robot_state_publisher]: Robot initializeddummy_robot_bringup_launch.py
import os # 导入操作系统模块
from launch import LaunchDescription # 从launch模块导入LaunchDescription类
from launch.substitutions import FileContent # 从launch.substitutions模块导入FileContent类
from launch_ros.actions import Node # 从launch_ros.actions模块导入Node类
from launch_ros.substitutions import FindPackageShare # 从launch_ros.substitutions模块导入FindPackageShare类
def generate_launch_description(): # 定义生成启动描述的函数
pkg_share = FindPackageShare('dummy_robot_bringup').find('dummy_robot_bringup')
# 查找'dummy_robot_bringup'包的共享路径
urdf_file = os.path.join(pkg_share, 'launch', 'single_rrbot.urdf')
# 构建URDF文件的路径
robot_desc = FileContent(urdf_file)
# 读取URDF文件的内容
rsp_params = {'robot_description': robot_desc}
# 创建包含机器人描述的参数字典
return LaunchDescription([ # 返回一个LaunchDescription对象,包含以下节点
Node(package='dummy_map_server', executable='dummy_map_server', output='screen'),
# 创建一个dummy_map_server节点,输出到屏幕
Node(package='robot_state_publisher', executable='robot_state_publisher',
output='screen', parameters=[rsp_params]),
# 创建一个robot_state_publisher节点,输出到屏幕,并传递机器人描述参数
Node(package='dummy_sensors', executable='dummy_joint_states', output='screen'),
# 创建一个dummy_joint_states节点,输出到屏幕
Node(package='dummy_sensors', executable='dummy_laser', output='screen')
# 创建一个dummy_laser节点,输出到屏幕
])如果您现在在一个新的终端中打开 RViz2,您将看到您的机器人。🎉
$ source ~/ros2_ws/install/setup.bash
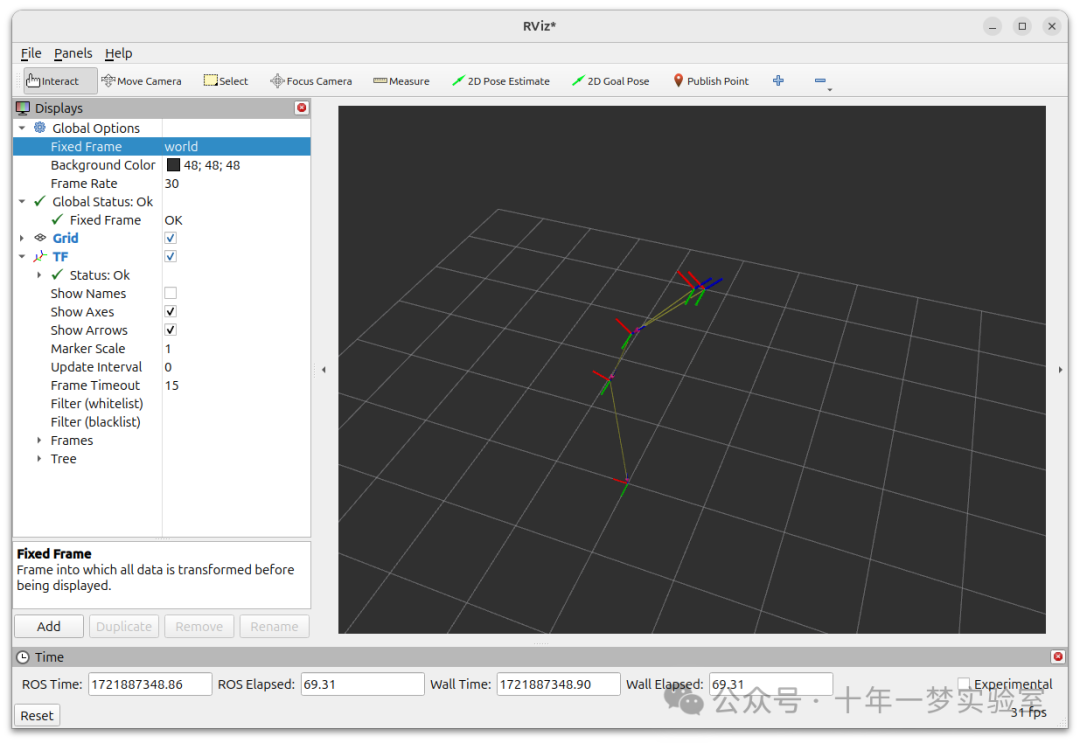
$ rviz2这将打开 RViz2。假设你仍然启动了 dummy_robot_bringup,现在你可以添加 TF 显示插件并将全局框架配置为 world 。完成后,你应该会看到类似的图片:
发生了什么?
如果你仔细查看启动文件,我们会同时启动几个节点。
dummy_map_server 虚拟地图服务器
dummy_laser 虚拟激光
dummy_joint_states 虚拟关节状态
robot_state_publisher 机器人状态发布器
前两个包相对简单。 dummy_map_server 不断发布一个带有周期性更新的空地图。 dummy_laser 基本上做同样的事情;发布虚假的激光扫描。
dummy_joint_states 节点正在发布假的关节状态数据。由于我们正在发布一个只有两个关节的简单 RRbot,因此该节点发布这两个关节的关节状态值。
robot_state_publisher 正在做实际有趣的工作。它解析给定的 URDF 文件,提取机器人模型并监听传入的关节状态。通过这些信息,它为我们的机器人发布 TF 值,我们在 RViz 中可视化这些值。
附录
cxy@cxy-Ubuntu2404:~/second_ros2_ws/src/demos/dummy_robot$ tree
.
├── dummy_map_server
│ ├── CHANGELOG.rst
│ ├── CMakeLists.txt
│ ├── img
│ │ └── occupancy_grid.png
│ ├── package.xml
│ ├── README.md
│ └── src
│ └── dummy_map_server.cpp
├── dummy_robot_bringup
│ ├── CHANGELOG.rst
│ ├── CMakeLists.txt
│ ├── config
│ │ └── dummy_robot.rviz
│ ├── launch
│ │ ├── dummy_robot_bringup_launch.py
│ │ ├── dummy_robot_bringup_launch.xml
│ │ ├── dummy_robot_bringup_launch.yaml
│ │ └── single_rrbot.urdf
│ └── package.xml
└── dummy_sensors
├── CHANGELOG.rst
├── CMakeLists.txt
├── package.xml
├── README.md
└── src
├── dummy_joint_states.cpp
└── dummy_laser.cpp
9 directories, 20 files
cxy@cxy-Ubuntu2404:~/seco这些代码片段展示了如何在ROS 2中创建和发布不同类型的消息,包括占用栅格、关节状态和激光扫描数据。以下是每个代码片段的总结:
占用栅格消息发布:
初始化ROS 2节点并创建一个名为
dummy_map_server的节点。创建一个发布
nav_msgs::msg::OccupancyGrid消息的发布者。设置占用栅格的分辨率、尺寸和原点位置。
初始化栅格数据为未知状态。
在循环中更新栅格数据并发布消息。
关节状态消息发布:
初始化ROS 2节点并创建一个名为
dummy_joint_states的节点。创建一个发布
sensor_msgs::msg::JointState消息的发布者。设置关节名称和初始位置。
在循环中计算关节位置的正弦值并更新消息。
发布关节状态消息。
激光扫描消息发布:
初始化ROS 2节点并创建一个名为
dummy_laser的节点。创建一个发布
sensor_msgs::msg::LaserScan消息的发布者。设置激光扫描的角度分辨率、起始角度、终止角度和扫描频率。
初始化扫描数据并设置相关参数。
在循环中计算距离值并更新消息。
发布激光扫描消息。
这些代码展示了如何使用ROS 2的节点、发布者和消息类型来模拟机器人传感器数据的发布过程。每个代码片段都包含了初始化、消息设置和循环发布的基本步骤。
dummy_map_server.cpp
#include <chrono> // 导入时间相关的库
#include <iostream> // 导入输入输出流库
#include <memory> // 导入智能指针库
#include "rclcpp/clock.hpp" // 导入ROS 2的时钟库
#include "rclcpp/rclcpp.hpp" // 导入ROS 2的核心库
#include "rcl/rcl.h" // 导入ROS 2的C API库
#include "rclcpp/time_source.hpp" // 导入ROS 2的时间源库
#include "nav_msgs/msg/occupancy_grid.hpp" // 导入占用栅格消息类型
int main(int argc, char * argv[]) // 主函数入口
{
rclcpp::init(argc, argv); // 初始化ROS 2
auto node = rclcpp::Node::make_shared("dummy_map_server"); // 创建一个名为"dummy_map_server"的节点
auto map_pub = node->create_publisher<nav_msgs::msg::OccupancyGrid>( // 创建一个占用栅格消息的发布者
"map", // 话题名称为"map"
rclcpp::QoS(rclcpp::KeepLast(1)).transient_local()); // 使用QoS设置,保留最后一条消息并设置为瞬态本地
rclcpp::WallRate loop_rate(1); // 设置循环频率为1Hz
nav_msgs::msg::OccupancyGrid msg; // 创建一个占用栅格消息对象
msg.header.frame_id = "world"; // 设置消息的坐标系为"world"
msg.info.resolution = 0.1f; // 设置栅格分辨率为0.1米
msg.info.width = 100; // 设置栅格宽度为100
msg.info.height = 100; // 设置栅格高度为100
msg.info.origin.position.x = -(msg.info.width * msg.info.resolution) / 2; // 设置栅格原点的x坐标
msg.info.origin.position.y = -(msg.info.width * msg.info.resolution) / 2; // 设置栅格原点的y坐标
msg.info.origin.position.z = 0; // 设置栅格原点的z坐标
msg.info.origin.orientation.x = 0; // 设置栅格原点的四元数x分量
msg.info.origin.orientation.y = 0; // 设置栅格原点的四元数y分量
msg.info.origin.orientation.z = 0; // 设置栅格原点的四元数z分量
msg.info.origin.orientation.w = 1; // 设置栅格原点的四元数w分量
for (size_t i = 0; i < msg.info.width * msg.info.height; ++i) { // 初始化栅格数据
msg.data.push_back(-1); // 将所有栅格设置为未知状态
}
rclcpp::TimeSource ts(node); // 创建一个时间源对象并附加到节点
rclcpp::Clock::SharedPtr clock = std::make_shared<rclcpp::Clock>(RCL_ROS_TIME); // 创建一个ROS时间的时钟对象
ts.attachClock(clock); // 将时钟附加到时间源
int lhs = 0; // 初始化左侧索引
int center = 1; // 初始化中心索引
int rhs = 2; // 初始化右侧索引
while (rclcpp::ok()) { // 循环直到ROS关闭
msg.data[(lhs) % (msg.info.width * msg.info.height)] = -1; // 设置左侧栅格为未知状态
msg.data[(center) % (msg.info.width * msg.info.height)] = -1; // 设置中心栅格为未知状态
msg.data[(rhs) % (msg.info.width * msg.info.height)] = -1; // 设置右侧栅格为未知状态
msg.data[(++lhs) % (msg.info.width * msg.info.height)] = 0; // 设置新的左侧栅格为空闲状态
msg.data[(++center) % (msg.info.width * msg.info.height)] = 100; // 设置新的中心栅格为占用状态
msg.data[(++rhs) % (msg.info.width * msg.info.height)] = 0; // 设置新的右侧栅格为空闲状态
msg.header.stamp = clock->now(); // 更新消息的时间戳
map_pub->publish(msg); // 发布占用栅格消息
rclcpp::spin_some(node); // 处理节点的回调函数
loop_rate.sleep(); // 休眠以保持循环频率
}
rclcpp::shutdown(); // 关闭ROS
return 0; // 返回0表示程序正常结束
}dummy_joint_states.cpp
#include <chrono> // 导入时间相关的库
#include <cmath> // 导入数学库
#include <iostream> // 导入输入输出流库
#include <memory> // 导入智能指针库
#include "rclcpp/clock.hpp" // 导入ROS 2的时钟库
#include "rclcpp/rclcpp.hpp" // 导入ROS 2的核心库
#include "rclcpp/time_source.hpp" // 导入ROS 2的时间源库
#include "sensor_msgs/msg/joint_state.hpp" // 导入关节状态消息类型
int main(int argc, char * argv[]) // 主函数入口
{
rclcpp::init(argc, argv); // 初始化ROS 2
auto node = rclcpp::Node::make_shared("dummy_joint_states"); // 创建一个名为"dummy_joint_states"的节点
auto joint_state_pub = node->create_publisher<sensor_msgs::msg::JointState>("joint_states", 10);
// 创建一个关节状态消息的发布者,话题名称为"joint_states",队列大小为10
rclcpp::WallRate loop_rate(50); // 设置循环频率为50Hz
sensor_msgs::msg::JointState msg; // 创建一个关节状态消息对象
msg.name.push_back("single_rrbot_joint1"); // 添加关节名称"single_rrbot_joint1"
msg.name.push_back("single_rrbot_joint2"); // 添加关节名称"single_rrbot_joint2"
msg.position.push_back(0.0); // 初始化关节1的位置为0.0
msg.position.push_back(0.0); // 初始化关节2的位置为0.0
rclcpp::TimeSource ts(node); // 创建一个时间源对象并附加到节点
rclcpp::Clock::SharedPtr clock = std::make_shared<rclcpp::Clock>(RCL_ROS_TIME); // 创建一个ROS时间的时钟对象
ts.attachClock(clock); // 将时钟附加到时间源
auto counter = 0.0; // 初始化计数器
auto joint_value = 0.0; // 初始化关节值
while (rclcpp::ok()) { // 循环直到ROS关闭
counter += 0.1; // 增加计数器
joint_value = std::sin(counter); // 计算关节值为正弦函数
for (size_t i = 0; i < msg.name.size(); ++i) { // 更新所有关节的位置
msg.position[i] = joint_value; // 设置关节位置为计算的关节值
}
msg.header.stamp = clock->now(); // 更新消息的时间戳
joint_state_pub->publish(msg); // 发布关节状态消息
rclcpp::spin_some(node); // 处理节点的回调函数
loop_rate.sleep(); // 休眠以保持循环频率
}
rclcpp::shutdown(); // 关闭ROS
return 0; // 返回0表示程序正常结束
}dummy_laser.cpp
#ifdef _MSC_VER // 如果使用的是Microsoft编译器
#ifndef _USE_MATH_DEFINES // 如果没有定义_USE_MATH_DEFINES
#define _USE_MATH_DEFINES // 定义_USE_MATH_DEFINES以便使用数学常量
#endif
#endif
#include <math.h> // 导入数学库
#include <chrono> // 导入时间相关的库
#include <iostream> // 导入输入输出流库
#include <memory> // 导入智能指针库
#include "rclcpp/clock.hpp" // 导入ROS 2的时钟库
#include "rclcpp/rclcpp.hpp" // 导入ROS 2的核心库
#include "rclcpp/time_source.hpp" // 导入ROS 2的时间源库
#include "sensor_msgs/msg/laser_scan.hpp" // 导入激光扫描消息类型
#define DEG2RAD M_PI / 180.0 // 定义角度到弧度的转换常量
int main(int argc, char * argv[]) // 主函数入口
{
rclcpp::init(argc, argv); // 初始化ROS 2
auto node = rclcpp::Node::make_shared("dummy_laser"); // 创建一个名为"dummy_laser"的节点
auto laser_pub = node->create_publisher<sensor_msgs::msg::LaserScan>("scan", 10);
// 创建一个激光扫描消息的发布者,话题名称为"scan",队列大小为10
rclcpp::WallRate loop_rate(30); // 设置循环频率为30Hz
sensor_msgs::msg::LaserScan msg; // 创建一个激光扫描消息对象
msg.header.frame_id = "single_rrbot_hokuyo_link"; // 设置消息的坐标系为"single_rrbot_hokuyo_link"
double angle_resolution = 2500; // 设置角度分辨率
double start_angle = -450000; // 设置起始角度
double stop_angle = 2250000; // 设置终止角度
double scan_frequency = 2500; // 设置扫描频率
double angle_range = stop_angle - start_angle; // 计算角度范围
double num_values = angle_range / angle_resolution; // 计算扫描值的数量
if (static_cast<int>(angle_range) % static_cast<int>(angle_resolution) == 0) {
// 如果角度范围是角度分辨率的整数倍,包含终点
++num_values;
}
msg.ranges.resize(static_cast<int>(num_values)); // 调整ranges数组的大小
// 设置time_increment为0以避免在rviz2中显示不稳定状态
msg.time_increment = 0.0f;
msg.angle_increment = static_cast<float>(angle_resolution / 10000.0 * DEG2RAD); // 设置角度增量
msg.angle_min = static_cast<float>(start_angle / 10000.0 * DEG2RAD - M_PI / 2); // 设置最小角度
msg.angle_max = static_cast<float>(stop_angle / 10000.0 * DEG2RAD - M_PI / 2); // 设置最大角度
msg.scan_time = static_cast<float>(100.0 / scan_frequency); // 设置扫描时间
msg.range_min = 0.0f; // 设置最小范围
msg.range_max = 10.0f; // 设置最大范围
RCLCPP_INFO(node->get_logger(), "angle inc:\t%f", msg.angle_increment); // 输出角度增量信息
RCLCPP_INFO(node->get_logger(), "scan size:\t%zu", msg.ranges.size()); // 输出扫描大小信息
RCLCPP_INFO(node->get_logger(), "scan time increment: \t%f", msg.time_increment); // 输出扫描时间增量信息
rclcpp::TimeSource ts(node); // 创建一个时间源对象并附加到节点
rclcpp::Clock::SharedPtr clock = std::make_shared<rclcpp::Clock>(RCL_ROS_TIME); // 创建一个ROS时间的时钟对象
ts.attachClock(clock); // 将时钟附加到时间源
auto counter = 0.0; // 初始化计数器
auto amplitude = 1; // 设置振幅
auto distance = 0.0f; // 初始化距离
while (rclcpp::ok()) { // 循环直到ROS关闭
counter += 0.1; // 增加计数器
distance = static_cast<float>(std::abs(amplitude * std::sin(counter))); // 计算距离为正弦函数的绝对值
for (size_t i = 0; i < msg.ranges.size(); ++i) { // 更新所有扫描值
msg.ranges[i] = distance; // 设置扫描值为计算的距离
}
msg.header.stamp = clock->now(); // 更新消息的时间戳
laser_pub->publish(msg); // 发布激光扫描消息
rclcpp::spin_some(node); // 处理节点的回调函数
loop_rate.sleep(); // 休眠以保持循环频率
}
rclcpp::shutdown(); // 关闭ROS
return 0; // 返回0表示程序正常结束
}
















 1924
1924

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









