



目标:记录发布在某个主题和服务上的数据,以便您可以随时回放和检查。
教程级别:初学者
时间:15 分钟
目录
背景
先决条件
管理主题数据
1. 设置
2. 选择一个话题
3 .记录主题
4..检查主题数据
5 .播放主题数据
管理服务数据
1. 设置
2.检查服务可用性
3.记录服务
4.检查服务数据
5 .播放服务数据
摘要
下一步
相关内容
背景
ros2 bag 是一个命令行工具,用于记录 ROS 2 系统中发布在主题和服务上的数据。它可以累积任意数量的主题和服务传递的数据,然后将其保存在数据库中。您可以随后重放数据以复现您的测试和实验结果。记录主题和服务也是分享您的工作并让他人重现的好方法。
先决条件
您应该将 ros2 bag 作为常规 ROS 2 设置的一部分进行安装。
如果您需要安装 ROS 2,请查看安装说明。
本教程讨论了前面教程中涉及的概念,如节点、主题和服务。它还使用了 turtlesim 包和服务内省演示。
始终不要忘记在您打开的每个新终端中获取 ROS 2 的源。
管理主题数据
1. 设置
您将在 turtlesim 系统中记录键盘输入,以便稍后保存和回放,因此请开始启动 /turtlesim 和 /teleop_turtle 节点。
打开一个新的终端并运行:
ros2 run turtlesim turtlesim_node打开另一个终端并运行:
ros2 run turtlesim turtle_teleop_key我们还应该新建一个目录来存储我们保存的录音,这是一个好习惯:
mkdir bag_files
cd bag_files2. 选择一个话题
ros2 bag 可以记录从主题发布的消息中的数据。要查看系统主题的列表,请打开一个新的终端并运行以下命令:
ros2 topic list将返回:
cxy@ubuntu2404-cxy:~/bag_files$ ros2 topic list
/parameter_events
/rosout
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose在主题教程中,您学到了 /turtle_teleop 节点在 /turtle1/cmd_vel 主题上发布命令,以使海龟在 turtlesim 中移动。
要查看 /turtle1/cmd_vel 发布的数据,请运行以下命令:
ros2 topic echo /turtle1/cmd_vel刚开始时什么也不会显示,因为遥控器没有发布任何数据。返回到你运行遥控器的终端,并选择它以便它处于活动状态。使用箭头键移动乌龟,你将看到运行 ros2 topic echo 的终端上发布了数据。
cxy@ubuntu2404-cxy:~/bag_files$ ros2 topic echo /turtle1/cmd_vel
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: -2.0
---
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
3 记录主题
3.1 记录单一主题
要记录发布到主题的数据,请使用以下命令语法:
ros2 bag record <topic_name>在运行此命令之前,请打开一个新的终端,并移动到您之前创建的 bag_files 目录,因为 rosbag 文件将保存在您运行它的目录中。
执行命令:
ros2 bag record /turtle1/cmd_vel您将在终端中看到以下消息(日期和时间会有所不同)
cxy@ubuntu2404-cxy:~/bag_files$ ros2 bag record /turtle1/cmd_vel
[INFO] [1720089680.740411870] [rosbag2_recorder]: Press SPACE for pausing/resuming
[INFO] [1720089680.938029175] [rosbag2_recorder]: Listening for topics...
[INFO] [1720089680.938098500] [rosbag2_recorder]: Event publisher thread: Starting
[INFO] [1720089680.978356037] [rosbag2_recorder]: Subscribed to topic '/turtle1/cmd_vel'
[INFO] [1720089680.978601776] [rosbag2_recorder]: Recording...
[INFO] [1720089680.982589064] [rosbag2_recorder]: All requested topics are subscribed. Stopping discovery...现在 ros2 bag 正在记录发布在 /turtle1/cmd_vel 主题上的数据。返回到遥控终端,再次移动乌龟。移动本身并不重要,但尝试制作一个可识别的模式,以便稍后在回放数据时能看出来。
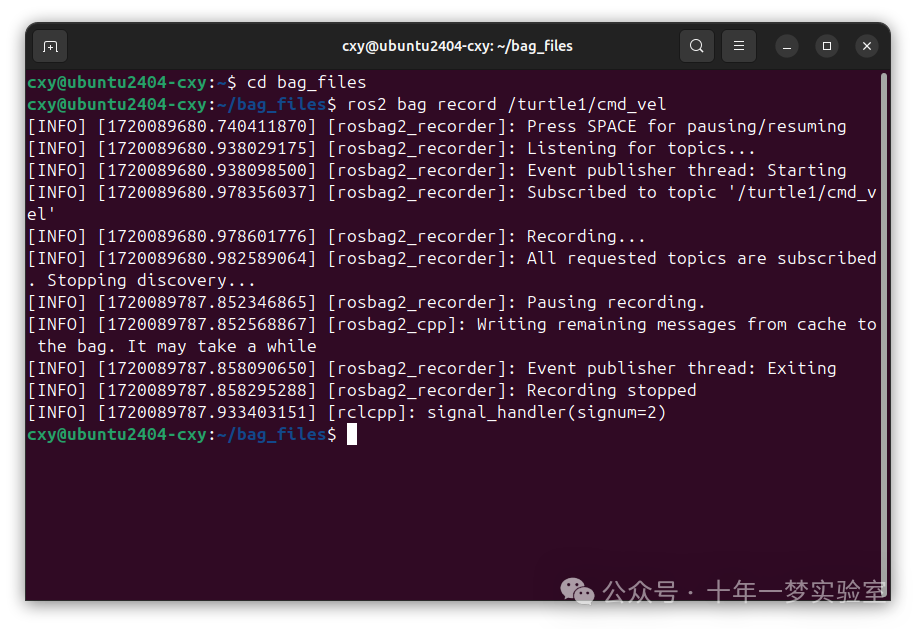
按 Ctrl+C 停止记录。
数据将会累积在一个新的包目录中,该目录的名称模式为 rosbag2_year_month_day-hour_minute_second 。这个目录将包含一个 metadata.yaml 以及以录制格式的包文件。
4. 记录多个主题
您也可以记录多个主题,以及更改文件 ros2 bag 保存为的名称。
执行以下命令:
ros2 bag record -o subset /turtle1/cmd_vel /turtle1/pose“ -o ”选项允许您为您的包文件选择一个独特的名称。在这种情况下,接下来的字符串“ subset ”是文件名。
要同时记录多个主题,只需将每个主题用空格分开列出即可。
您将看到以下消息,确认这两个话题正在被记录。
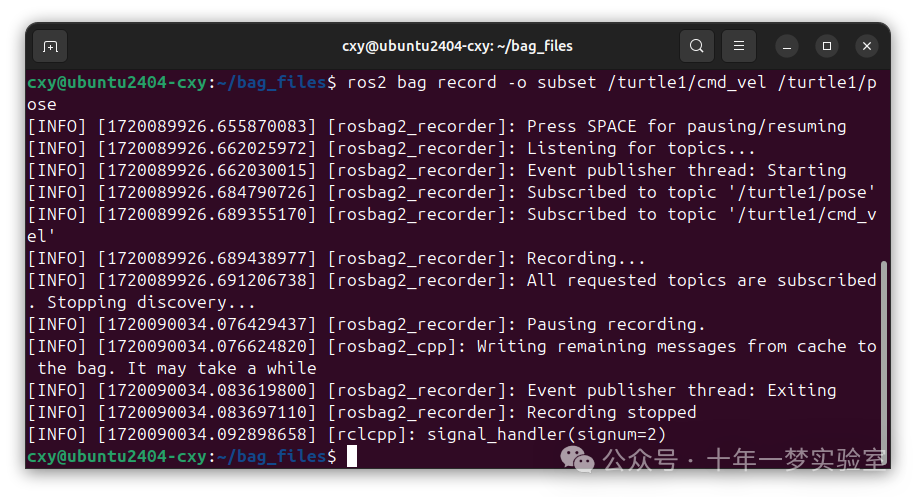
cxy@ubuntu2404-cxy:~/bag_files$ ros2 bag record -o subset /turtle1/cmd_vel /turtle1/pose
[ERROR] [ros2bag]: Output folder 'subset' already exists.
cxy@ubuntu2404-cxy:~/bag_files$ ros2 bag record -o subset /turtle1/cmd_vel /turtle1/pose
[INFO] [1720090401.115912486] [rosbag2_recorder]: Press SPACE for pausing/resuming
[INFO] [1720090401.137248845] [rosbag2_recorder]: Listening for topics...
[INFO] [1720090401.137296446] [rosbag2_recorder]: Event publisher thread: Starting
[INFO] [1720090401.149507412] [rosbag2_recorder]: Subscribed to topic '/turtle1/pose'
[INFO] [1720090401.156447052] [rosbag2_recorder]: Subscribed to topic '/turtle1/cmd_vel'
[INFO] [1720090401.156567047] [rosbag2_recorder]: Recording...
[INFO] [1720090401.158847683] [rosbag2_recorder]: All requested topics are subscribed. Stopping discovery...
[INFO] [1720090431.756737649] [rosbag2_recorder]: Pausing recording.
[INFO] [1720090431.756979417] [rosbag2_cpp]: Writing remaining messages from cache to the bag. It may take a while
[INFO] [1720090431.766412358] [rosbag2_recorder]: Event publisher thread: Exiting
[INFO] [1720090431.766623008] [rosbag2_recorder]: Recording stopped
[INFO] [1720090431.845740280] [rclcpp]: signal_handler(signum=2)
你可以移动乌龟,完成后按 Ctrl+C 。
便条
您可以向命令添加另一个选项, -a ,它会记录系统上的所有主题。
4 检查主题数据
您可以通过运行以下内容查看记录的详细信息:
ros2 bag info <bag_file_name在 subset 包文件上运行此命令将返回有关文件的信息列表:
ros2 bag info subsetcxy@ubuntu2404-cxy:~/bag_files$ ros2 bag info subset
Files: subset_0.mcap
Bag size: 157.8 KiB
Storage id: mcap
ROS Distro: jazzy
Duration: 30.593s
Start: Jul 4 2024 18:53:21.152 (1720090401.152)
End: Jul 4 2024 18:53:51.746 (1720090431.746)
Messages: 2090
Topic information: Topic: /turtle1/cmd_vel | Type: geometry_msgs/msg/Twist | Count: 177 | Serialization Format: cdr
Topic: /turtle1/pose | Type: turtlesim/msg/Pose | Count: 1913 | Serialization Format: cdr
Service: 0
Service information: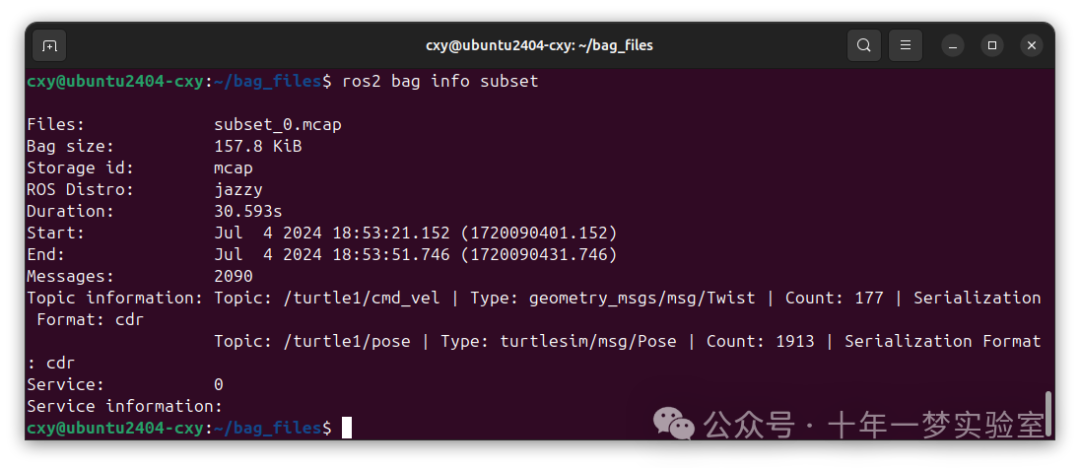
5 播放主题数据
在重放 bag 文件之前,请在运行 teleop 的终端中输入 Ctrl+C 。然后确保你的 turtlesim 窗口是可见的,这样你就可以看到 bag 文件的动作。
输入命令:
ros2 bag play subset终端将返回消息:
cxy@ubuntu2404-cxy:~/bag_files$ ros2 bag play subset
[INFO] [1720090572.751144971] [rosbag2_player]: Set rate to 1
[INFO] [1720090572.763453123] [rosbag2_player]: Adding keyboard callbacks.
[INFO] [1720090572.763515820] [rosbag2_player]: Press SPACE for Pause/Resume
[INFO] [1720090572.763540845] [rosbag2_player]: Press CURSOR_RIGHT for Play Next Message
[INFO] [1720090572.763561584] [rosbag2_player]: Press CURSOR_UP for Increase Rate 10%
[INFO] [1720090572.763580601] [rosbag2_player]: Press CURSOR_DOWN for Decrease Rate 10%
[INFO] [1720090572.763945754] [rosbag2_player]: Playback until timestamp: -1
[INFO] [1720090581.169025007] [rosbag2_player]: Pausing play.
[INFO] [1720090583.232968938] [rosbag2_player]: Resuming play.您的乌龟将会跟随您在录制时输入的同一路径(尽管不是 100%精确;turtlesim 对系统时间的微小变化很敏感)。
因为 subset 文件记录了 /turtle1/pose 主题,所以只要你的 turtlesim 在运行,即使你没有移动, ros2 bag play 命令也不会退出。
这是因为只要 /turtlesim 节点处于活动状态,它就会定期在 /turtle1/pose 主题上发布数据。您可能已经注意到在上面的 ros2 bag info 示例结果中, /turtle1/cmd_vel 主题的 Count 信息只有17;那是我们在录制时按下箭头键的次数。
请注意, /turtle1/pose 的 Count 值超过 1913;在我们记录时,该主题的数据已发布了 3000 次。
要了解位置数据发布的频率,您可以运行以下命令:
ros2 topic hz /turtle1/pose管理服务数据
1. 设置
您将在 introspection_client 和 introspection_service 之间记录服务数据,然后稍后显示并重放相同的数据。要在服务客户端和服务器之间记录服务数据,必须在节点上启用 Service Introspection 。
让我们启动 introspection_client 和 introspection_service 节点,并启用 Service Introspection 。您可以查看服务自省演示的更多详情。
打开一个新的终端并运行 introspection_service ,启用 Service Introspection :
ros2 run demo_nodes_cpp introspection_service --ros-args -p service_configure_introspection:=contents打开另一个终端并运行 introspection_client ,启用 Service Introspection :
ros2 run demo_nodes_cpp introspection_client --ros-args -p client_configure_introspection:=contents
2 检查服务可用性
ros2 bag 只能记录可用服务的数据。要查看系统服务列表,请打开一个新终端并运行命令:
ros2 service list将返回:
cxy@ubuntu2404-cxy:~$ ros2 service list
/add_two_ints
/introspection_client/describe_parameters
/introspection_client/get_parameter_types
/introspection_client/get_parameters
/introspection_client/get_type_description
/introspection_client/list_parameters
/introspection_client/set_parameters
/introspection_client/set_parameters_atomically
/introspection_service/describe_parameters
/introspection_service/get_parameter_types
/introspection_service/get_parameters
/introspection_service/get_type_description
/introspection_service/list_parameters
/introspection_service/set_parameters
/introspection_service/set_parameters_atomically要检查 Service Introspection 是否在客户端和服务上启用,请运行以下命令:
ros2 service echo --flow-style /add_two_ints您应该看到如下的服务通信:
cxy@ubuntu2404-cxy:~$ ros2 service echo --flow-style /add_two_ints
info:
event_type: REQUEST_SENT
stamp:
sec: 1720099475
nanosec: 143255056
client_gid: [1, 15, 189, 33, 239, 105, 121, 147, 0, 0, 0, 0, 0, 0, 21, 3]
sequence_number: 240
request: [{a: 2, b: 3}]
response: []
---
info:
event_type: REQUEST_RECEIVED
stamp:
sec: 1720099475
nanosec: 143700400
client_gid: [1, 15, 189, 33, 239, 105, 121, 147, 0, 0, 0, 0, 0, 0, 20, 4]
sequence_number: 240
request: [{a: 2, b: 3}]
response: []
---3 记录服务
要记录服务数据,支持以下选项。服务数据可以与主题同时记录。
要记录特定服务:
ros2 bag record --service <service_names>记录所有服务:
ros2 bag record --all-services执行命令:
ros2 bag record --service /add_two_ints您将在终端中看到以下消息(日期和时间会有所不同):
cxy@ubuntu2404-cxy:~ros2 bag record --service /add_two_intsts
[INFO] [1720099698.274264497] [rosbag2_recorder]: Press SPACE for pausing/resuming
[INFO] [1720099698.281315607] [rosbag2_recorder]: Listening for topics...
[INFO] [1720099698.281318412] [rosbag2_recorder]: Event publisher thread: Starting
[INFO] [1720099698.393683310] [rosbag2_recorder]: Subscribed to topic '/add_two_ints/_service_event'
[INFO] [1720099698.394029292] [rosbag2_recorder]: Recording...现在 ros2 bag 正在记录 /add_two_ints 服务上发布的服务数据。要停止录制,请在终端输入 Ctrl+C 。
数据将会累积在一个新的包目录中,该目录的名称模式为 rosbag2_year_month_day-hour_minute_second 。这个目录将包含一个 metadata.yaml 以及以录制格式的包文件。
4. 检查服务数据
您可以通过运行以下内容查看录音的详细信息:
ros2 bag info <bag_file_name>执行此命令将返回有关文件的信息列表:
cxy@ubuntu2404-cxy:~$ ros2 bag info rosbag2_2024_07_04-21_28_18
Files: rosbag2_2024_07_04-21_28_18_0.mcap
Bag size: 31.7 KiB
Storage id: mcap
ROS Distro: jazzy
Duration: 29.740s
Start: Jul 4 2024 21:28:18.404 (1720099698.404)
End: Jul 4 2024 21:28:48.144 (1720099728.144)
Messages: 0
Topic information:
Service: 1
Service information: Service: /add_two_ints | Type: example_interfaces/srv/AddTwoInts | Event Count: 242 | Serialization Format: cdr5 播放服务数据
在重放 bag 文件之前,请在运行 introspection_client 的终端中输入 Ctrl+C 。当 introspection_client 停止运行时, introspection_service 也会停止打印结果,因为没有传入的请求。
重播包文件中的服务数据将开始向 introspection_service 发送请求。
输入命令:
ros2 bag play --publish-service-requests <bag_file_name>终端将返回消息:
cxy@ubuntu2404-cxy:~$ ros2 bag play --publish-service-requests rosbag2_2024_07_04-21_28_18
[INFO] [1720100036.322875992] [rosbag2_player]: Set rate to 1
[INFO] [1720100036.334878718] [rosbag2_player]: Adding keyboard callbacks.
[INFO] [1720100036.334924436] [rosbag2_player]: Press SPACE for Pause/Resume
[INFO] [1720100036.334947912] [rosbag2_player]: Press CURSOR_RIGHT for Play Next Message
[INFO] [1720100036.334970134] [rosbag2_player]: Press CURSOR_UP for Increase Rate 10%
[INFO] [1720100036.334990811] [rosbag2_player]: Press CURSOR_DOWN for Decrease Rate 10%
[INFO] [1720100036.335640862] [rosbag2_player]: Playback until timestamp: -1您的 introspection_service 终端将再次开始打印以下服务消息:
[INFO] [1713997478.090466075] [introspection_service]: Incoming request
a: 2 b: 3这是因为 ros2 bag play 将包文件中的服务请求数据发送到 /add_two_ints 服务。
我们也可以内省服务通信,因为 ros2 bag play 正在回放以验证 introspection_service 。
在 ros2 bag play 之前运行此命令以查看 introspection_service :
ros2 service echo --flow-style /add_two_ints您可以从 bag 文件中看到服务请求,从 introspection_service 中看到服务响应。
cxy@ubuntu2404-cxy:~$ ros2 service echo --flow-style /add_two_ints
info:
event_type: REQUEST_RECEIVED
stamp:
sec: 1720100131
nanosec: 122539133
client_gid: [1, 15, 189, 33, 81, 112, 35, 20, 0, 0, 0, 0, 0, 0, 20, 4]
sequence_number: 1
request: [{a: 2, b: 3}]
response: []
---
info:
event_type: RESPONSE_SENT
stamp:
sec: 1720100131
nanosec: 122703746
client_gid: [1, 15, 189, 33, 81, 112, 35, 20, 0, 0, 0, 0, 0, 0, 20, 4]
sequence_number: 1
request: []
response: [{sum: 5}]摘要
您可以使用 ros2 bag 命令记录在 ROS 2 系统中传递的主题和服务数据。无论您是与他人分享工作还是内省自己的实验,这都是一个非常好的工具。
下一步
您已完成“初学者:CLI 工具”教程!下一步是开始“初学者:客户端库”教程,从创建工作区开始https://docs.ros.org/en/jazzy/Tutorials/Beginner-Client-Libraries/Creating-A-Workspace/Creating-A-Workspace.html 。
相关内容
关于 ros2 bag 的更详细解释可以在这里 https://github.com/ros2/rosbag2 的自述文件中找到。有关服务记录和回放的更多信息可以在这里的设计文档https://docs.ros.org/en/jazzy/How-To-Guides/Overriding-QoS-Policies-For-Recording-And-Playback.html 中找到。有关 QoS 兼容性和 ros2 bag 的更多信息,请参阅 rosbag2:覆盖 QoS 策略 https://docs.ros.org/en/jazzy/How-To-Guides/Overriding-QoS-Policies-For-Recording-And-Playback.html。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









