



The viewer window provides interactive commands; for help, press 'h' or 'H' from within the window.
> Loading V:\learn\PCL\pcl\examples\test\chef.pcd [PCLVisualizer::setUseVbos] Has no effect when OpenGL version is 鈮?2
[done, 327.147 ms : 5092 points]
Available dimensions: x y z normal_x normal_y normal_z
The viewer window provides interactive commands; for help, press 'h' or 'H' from within the window.
> Loading V:\learn\PCL\pcl\examples\test\rs1.pcd [PCLVisualizer::setUseVbos] Has no effect when OpenGL version is 鈮?2
[done, 376.229 ms : 289541 points]
Available dimensions: x y z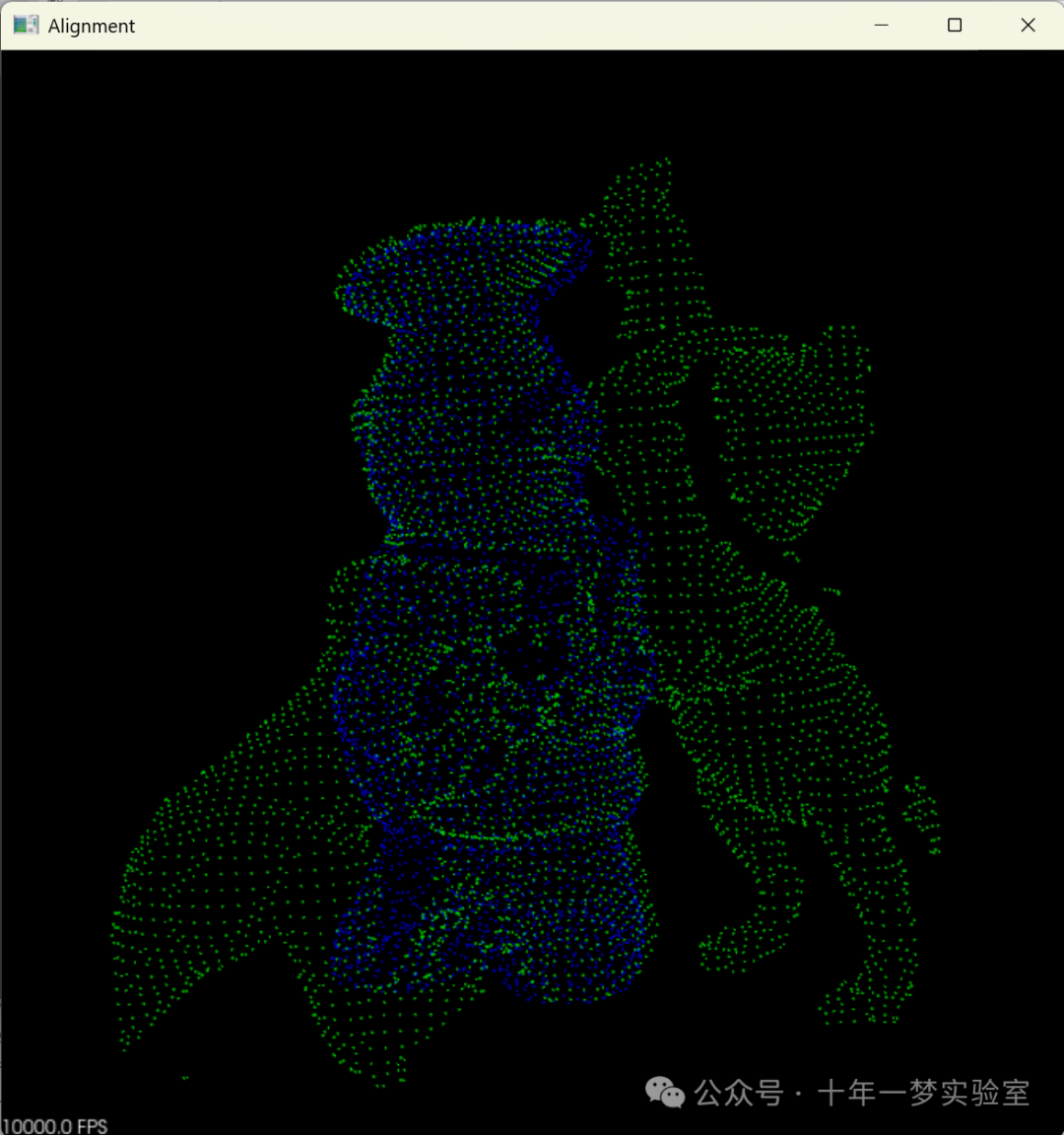
chef.pcd
rs1.pcd
> Loading point clouds...
Failed to find match for field 'curvature'.
Failed to find match for field 'normal_x'.
Failed to find match for field 'normal_y'.
Failed to find match for field 'normal_z'.
Failed to find match for field 'curvature'.
> Downsampling...
> Estimating scene normals...
> Estimating features...
> Starting alignment...
Alignment took 426.567ms.
| 0.089 -0.994 -0.064 |
R = | -0.996 -0.088 -0.016 |
| 0.010 0.065 -0.998 |
t = < -0.097, 0.042, 0.068 >
Inliers: 1443/3432前言
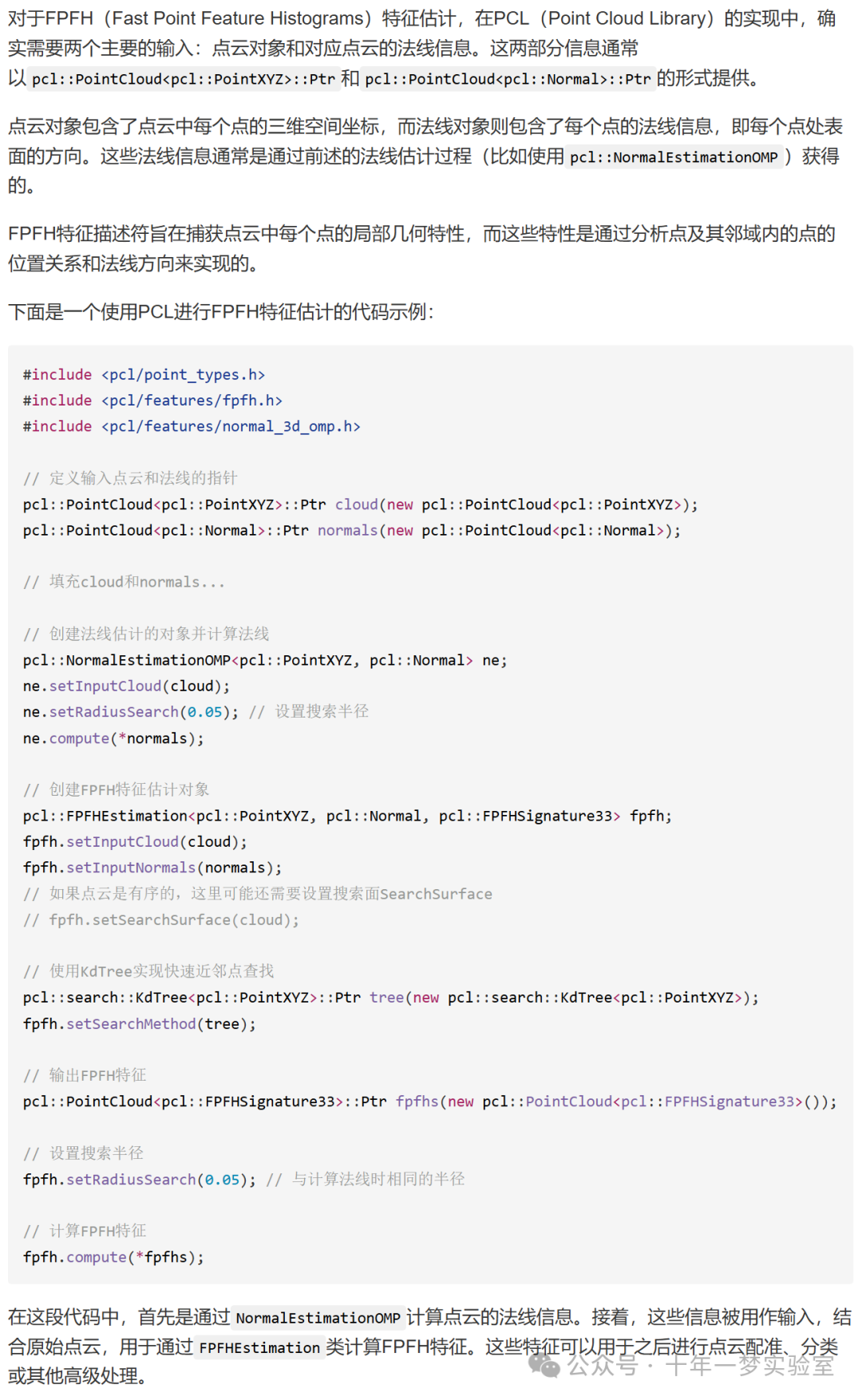
在本教程中,我们将展示如何在具有杂乱和遮挡的场景中找到刚性对象的对齐姿势(alignment pose of a rigid object)。
首先,下载测试模型:object (https://pcl.readthedocs.io/projects/tutorials/en/latest/_downloads/da6e6b8fbf78b559884f14174ad67c01/chef.pcd )和 scene(https://pcl.readthedocs.io/projects/tutorials/en/latest/_downloads/eb5b16fe36d0ec907bd4c65335af7cb7/rs1.pcd) 。
源码解析
这段代码是使用PCL库(点云库)和Eigen库来实现将一个刚性物体与一个包含杂乱无章和遮挡物的场景进行对齐的功能。下面是代码的详细解释和功能总结:
头文件引用:代码引用了Eigen库和PCL库的多个头文件,这些头文件为点云处理提供了基础结构、特征估计、过滤器、输入输出操作、注册方法和可视化工具。
类型定义:定义了多个别名,以简化代码中对特定类型的引用。包括点云、特征和颜色处理器的类型。
主函数(main):
初始化点云和特征:首先,代码创建了几个指向点云和特征的智能指针。
输入处理:检查命令行参数数量是否正确,如果不正确,则打印错误信息并返回。正确的语法需要包括目标对象和场景的PCD文件路径。
加载点云:加载目标对象和场景的点云数据。如果加载失败,会打印错误信息并返回。
下采样:使用体素网格(VoxelGrid)对目标对象和场景进行下采样,以减少点的数量并加快后续处理速度。
估计法线:对场景点云估计法线,这是很多特征估计和配准方法的前提条件。
特征估计:对目标对象和场景使用FPFH算法估计特征。该步骤为之后的配准过程提供必要的特征信息。
执行对齐(配准):使用基于采样一致性的预拒绝配准方法对目标对象和场景进行对齐。该方法考虑了特征相似性,并尝试找到最优的变换矩阵,以将目标对象对齐到场景中。
结果打印和可视化:如果配准成功,打印出变换矩阵和内点数量,并使用PCLVisualizer显示对齐结果。如果配准失败,则打印错误信息并返回。
功能总结:这段代码实现了一个3D对象与3D场景的精确对齐功能,包括点云加载、下采样、法线估计、特征估计和采样一致性预拒绝配准。成功对齐后,会显示对齐结果,并输出变换矩阵和内点信息。这对于在复杂场景中识别和定位特定对象非常有用。
#include <Eigen/Core> // 引入Eigen核心部分的头文件,用于进行矩阵等数学运算
#include <pcl/point_types.h> // 引入PCL库中点类型的定义
#include <pcl/point_cloud.h> // 引入PCL库中点云类型的定义
#include <pcl/common/time.h> // 引入PCL库中时间处理的功能
#include <pcl/console/print.h> // 引入PCL库的控制台打印功能,用于输出信息
#include <pcl/features/normal_3d_omp.h> // 引入PCL库中用于估计点云法线的功能
#include <pcl/features/fpfh_omp.h> // 引入PCL库中用于计算FPFH特征的功能
#include <pcl/filters/filter.h> // 引入PCL库中的滤波器功能
#include <pcl/filters/voxel_grid.h> // 引入PCL库中的体素网格滤波器,用于降采样
#include <pcl/io/pcd_io.h> // 引入PCL库中的点云数据输入输出功能
#include <pcl/registration/sample_consensus_prerejective.h> // 引入PCL库中进行样本一致性预拒绝配准的功能
#include <pcl/visualization/pcl_visualizer.h> // 引入PCL库中的点云可视化功能
// 类型定义 我们首先定义便利类型,以免代码混乱。
typedef pcl::PointNormal PointNT; // 定义包含法线信息的点类型
typedef pcl::PointCloud<PointNT> PointCloudT; // 定义包含法线的点云类型
typedef pcl::FPFHSignature33 FeatureT; // 定义用于FPFH特征的数据结构
typedef pcl::FPFHEstimationOMP<PointNT,PointNT,FeatureT> FeatureEstimationT; // 定义FPFH特征估计器类型
typedef pcl::PointCloud<FeatureT> FeatureCloudT; // 定义存放FPFH特征的点云类型
typedef pcl::visualization::PointCloudColorHandlerCustom<PointNT> ColorHandlerT; // 定义用于点云颜色处理的类型
// 与场景中的杂乱和遮挡进行刚体对齐
int main (int argc, char **argv)
{
// 点云定义
//然后我们实例化必要的数据容器,检查输入参数并加载对象和场景点云。
//尽管我们已经定义了包含法线的基本点类型,但我们只为对象预先定义了法线
//(通常是这种情况)。我们将估计下面场景的法线信息。
PointCloudT::Ptr object (new PointCloudT); // 定义待对齐的对象点云
PointCloudT::Ptr object_aligned (new PointCloudT); // 定义对齐后的对象点云
PointCloudT::Ptr scene_before_downsampling (new PointCloudT); // 定义降采样前的场景点云
PointCloudT::Ptr scene (new PointCloudT); // 定义场景点云
FeatureCloudT::Ptr object_features (new FeatureCloudT); // 定义对象点云的特征
FeatureCloudT::Ptr scene_features (new FeatureCloudT); // 定义场景点云的特征
// 获取输入对象和场景
if (argc != 3)
{
pcl::console::print_error ("Syntax is: %s object.pcd scene.pcd\n", argv[0]);
return (1);
}
std::cout << argv[1] << endl;
std::cout << argv[2] << endl;
// 加载对象和场景
pcl::console::print_highlight ("Loading point clouds...\n");
if (pcl::io::loadPCDFile<PointNT> (argv[1], *object) < 0 ||
pcl::io::loadPCDFile<PointNT> (argv[2], *scene_before_downsampling) < 0)
{
pcl::console::print_error ("Error loading object/scene file!\n");
return (1);
}
// 降采样 为了加快处理速度,我们使用 PCL 的 VoxelGrid 类
// 将对象和场景点云下采样至 5 毫米的分辨率。
pcl::console::print_highlight ("Downsampling...\n");
pcl::VoxelGrid<PointNT> grid; // 创建体素网格滤波器
const float leaf = 0.005f; // 定义体素大小
grid.setLeafSize (leaf, leaf, leaf); // 设置体素大小
grid.setInputCloud (object); // 设置输入点云为对象点云
grid.filter (*object); // 执行滤波
grid.setInputCloud (scene_before_downsampling); // 设置输入点云为场景点云
grid.filter (*scene); // 执行滤波
// 为场景估计法线
// 现在使用 PCL 的 NormalEstimationOMP 来估计场景中缺失的表面法线。
// 计算下面用于匹配的特征需要表面法线。
pcl::console::print_highlight ("Estimating scene normals...\n");
pcl::NormalEstimationOMP<PointNT,PointNT> nest; // 创建法线估计器
nest.setRadiusSearch (0.005); // 设置搜索半径
nest.setInputCloud (scene); // 设置输入点云
nest.setSearchSurface (scene_before_downsampling); // 设置搜索表面
nest.compute (*scene); // 执行法线估计
// 估计特征
//对于下采样点云中的每个点,我们现在使用 PCL 的 FPFHEstimationOMP 类
// 来计算用于在对齐过程中进行匹配的快速点特征直方图 (FPFH) 描述符。
pcl::console::print_highlight ("Estimating features...\n");
FeatureEstimationT fest; // 创建FPFH特征估计器
fest.setRadiusSearch (0.025); // 设置搜索半径
//object同时包含每个点的位置和法线数据
fest.setInputCloud (object); // 设置输入点云为对象点云
fest.setInputNormals (object); // 设置输入法线 object同时包含每个点的位置和法线数据
fest.compute (*object_features); // 计算对象点云的特征
fest.setInputCloud (scene); // 设置输入点云为场景点云
fest.setInputNormals (scene); // 设置输入法线为场景点云法线
fest.compute (*scene_features); // 计算场景点云的特征
// 执行对齐 我们现在准备好设置对齐过程。我们使用
// SampleConsensusPrerejective 类,它实现了高效的 RANSAC 位姿估计
// 循环。这是通过使用 CorrespondenceRejectorPoly 类提前消除不良姿势
// 假设来实现的。
pcl::console::print_highlight ("Starting alignment...\n");
pcl::SampleConsensusPrerejective<PointNT,PointNT,FeatureT> align; // 创建对齐器
align.setInputSource (object); // 设置源点云
align.setSourceFeatures (object_features); // 设置源点云特征
align.setInputTarget (scene); // 设置目标点云
align.setTargetFeatures (scene_features); // 设置目标点云特征
align.setMaximumIterations (50000); // 设置RANSAC迭代次数
align.setNumberOfSamples (3); // 设置采样点数
align.setCorrespondenceRandomness (5); // 设置最近特征使用数
align.setSimilarityThreshold (0.95f); // 设置边长相似度阈值
align.setMaxCorrespondenceDistance (2.5f * leaf); // 设置内点阈值
align.setInlierFraction (0.25f); // 设置接受一个姿态假设所需的内点比例
{// 最后,我们准备好执行对齐过程。
pcl::ScopeTime t("Alignment"); // 记录对齐时间
align.align (*object_aligned); // 执行对齐
}// 对齐的对象存储在点云object_aligned中。
// 如果找到具有足够内点的姿势(超过对象点总数的 25%),
// 则称算法收敛,我们可以打印和可视化结果。
if (align.hasConverged ())//在最后一次对齐运行之后返回收敛状态
{
// 打印结果
printf ("\n");
Eigen::Matrix4f transformation = align.getFinalTransformation (); // 获取最终变换矩阵
pcl::console::print_info (" | %6.3f %6.3f %6.3f | \n", transformation (0,0), transformation (0,1), transformation (0,2));
pcl::console::print_info ("R = | %6.3f %6.3f %6.3f | \n", transformation (1,0), transformation (1,1), transformation (1,2));
pcl::console::print_info (" | %6.3f %6.3f %6.3f | \n", transformation (2,0), transformation (2,1), transformation (2,2));
pcl::console::print_info ("\n");
pcl::console::print_info ("t = < %0.3f, %0.3f, %0.3f >\n", transformation (0,3), transformation (1,3), transformation (2,3));
pcl::console::print_info ("\n");
pcl::console::print_info ("Inliers: %i/%i\n", align.getInliers ().size (), object->size ());
// 显示对齐结果
pcl::visualization::PCLVisualizer visu("Alignment"); // 创建可视化器
visu.addPointCloud (scene, ColorHandlerT (scene, 0.0, 255.0, 0.0), "scene"); // 添加场景点云
visu.addPointCloud (object_aligned, ColorHandlerT (object_aligned, 0.0, 0.0, 255.0), "object_aligned"); // 添加对齐后的对象点云
visu.spin (); // 开始交互式可视化
}
else
{
pcl::console::print_error ("Alignment failed!\n"); // 打印对齐失败信息
return (1);
}
return (0);
}该代码是用于进行三维点云之间的刚体对齐的程序,主要实现了以下功能:
加载指定的对象(待对齐的模型)点云和场景(环境中的模型)点云。
对对象和场景点云进行降采样以提高处理效率。
为场景点云估计法线,这通常是对齐和其他点云处理任务的先决条件。
对对象和场景点云计算FPFH(Fast Point Feature Histograms)特征,这是一种描述点云局部几何特征的方法。
使用样本一致性预拒绝算法对对象点云进行刚体对齐到场景点云,即定位对象在场景中的位置和姿态。
输出对齐后的变换矩阵,并可视化对齐结果。
visu.addPointCloud (object_aligned, ColorHandlerT (object_aligned, 0.0, 0.0, 255.0), "object_aligned");
FPFH特征及其估计器
PCL 的体素网格滤波器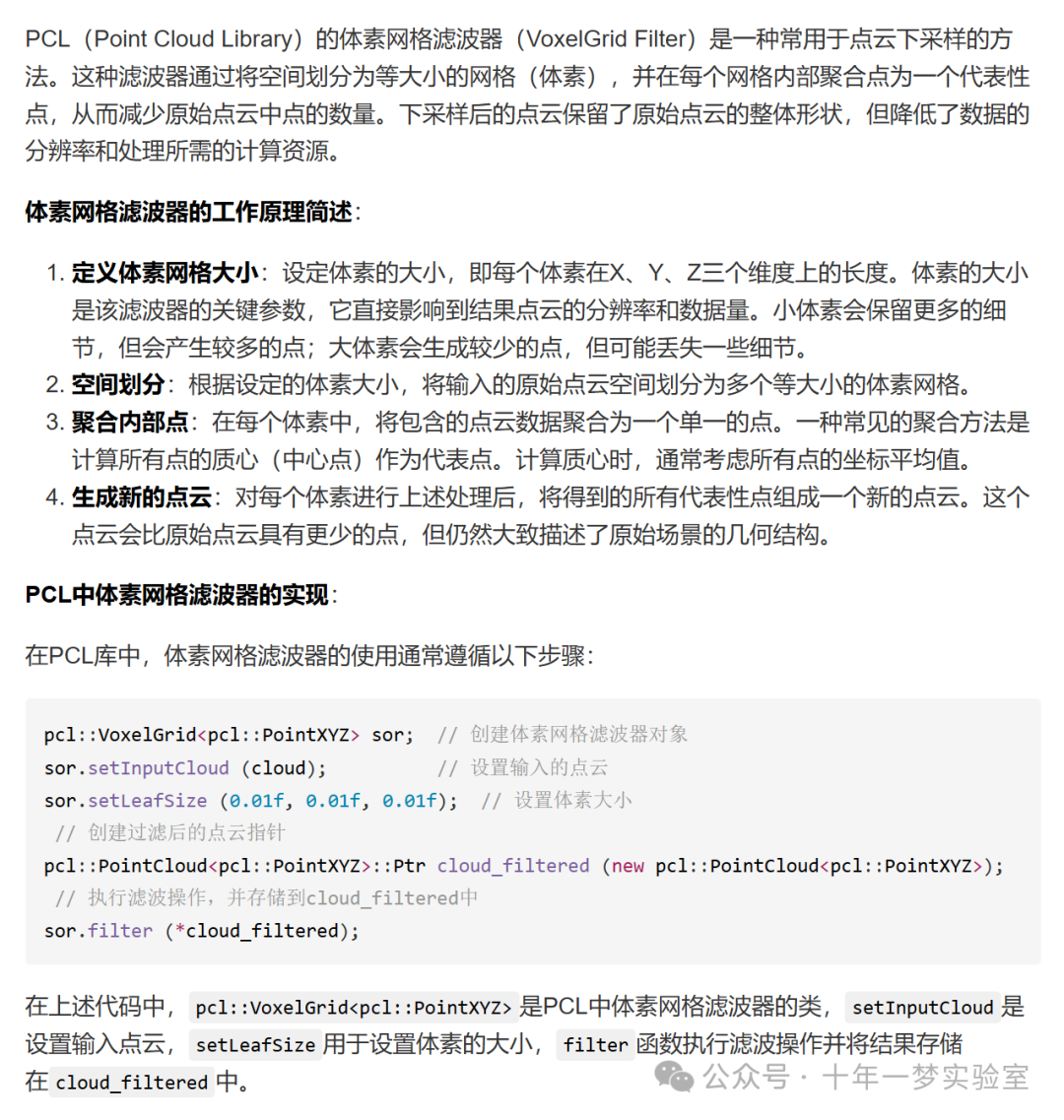
法线估计器 pcl::NormalEstimationOMP
pcl::SampleConsensusPrerejective 及对齐过程
aligner.getFinalTransformation();的物理意义是什么?
是对象坐标系位姿相对于场景坐标系位姿的坐标表示吗?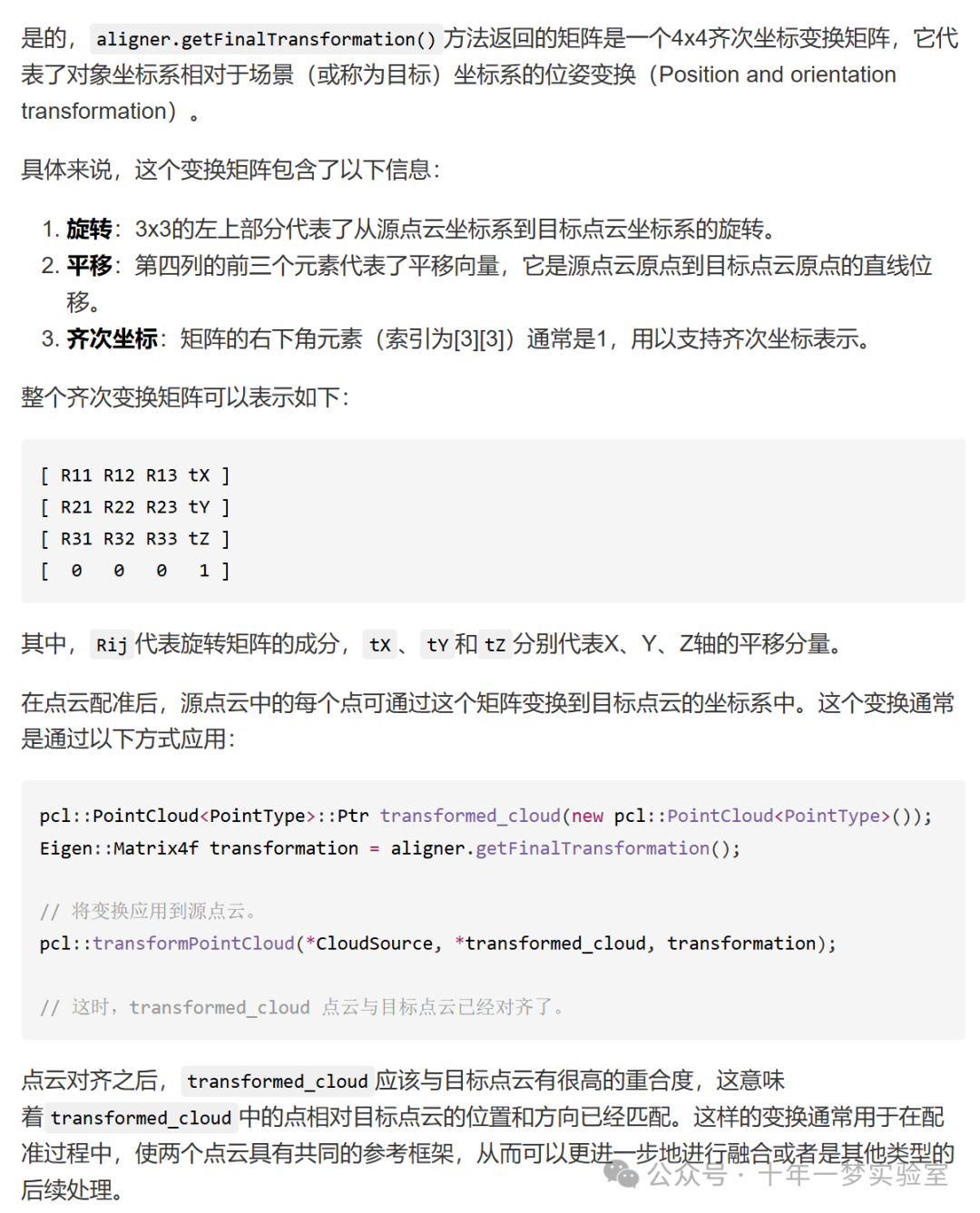
align.setInlierFraction(0.25f);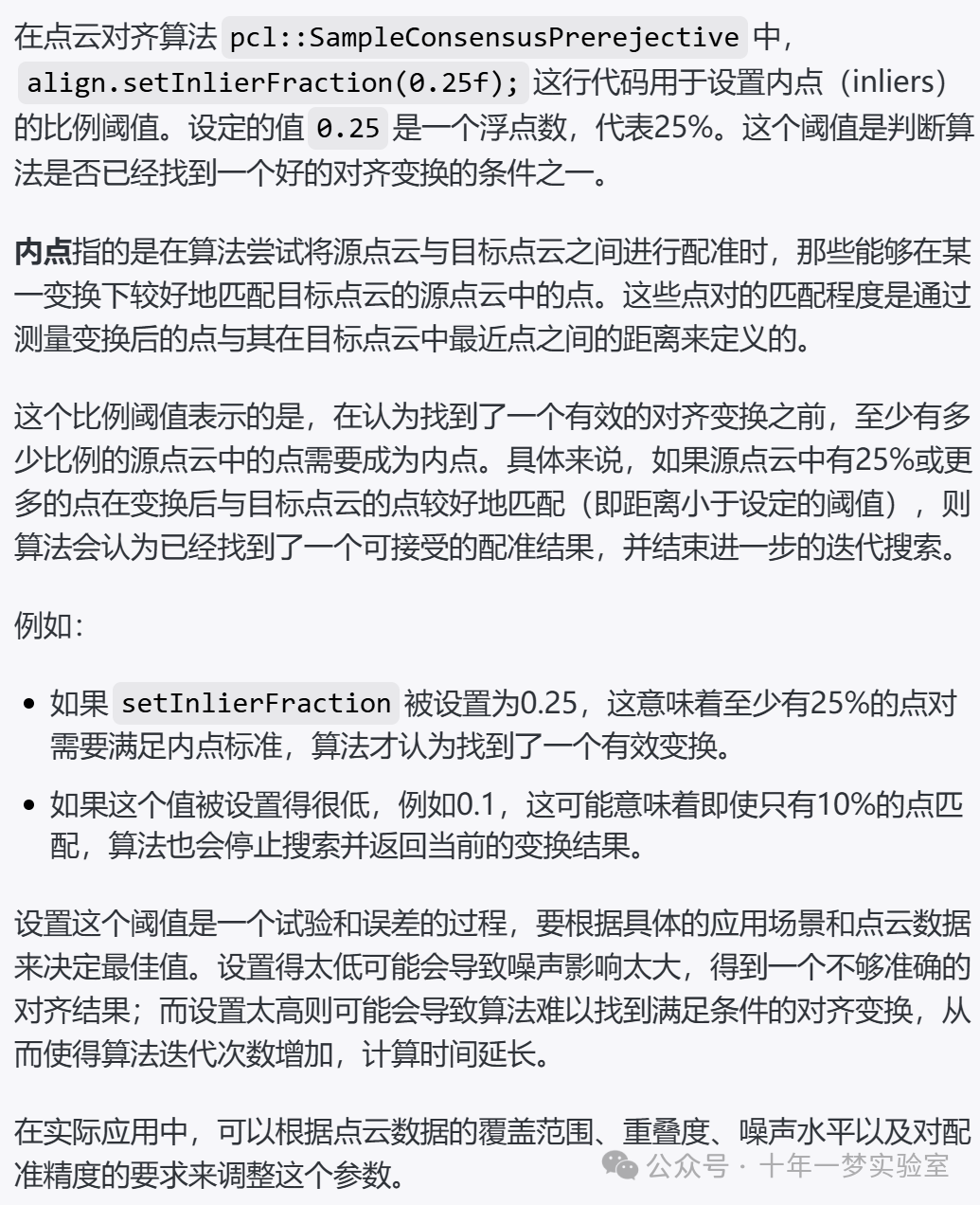
调试时设置argv参数
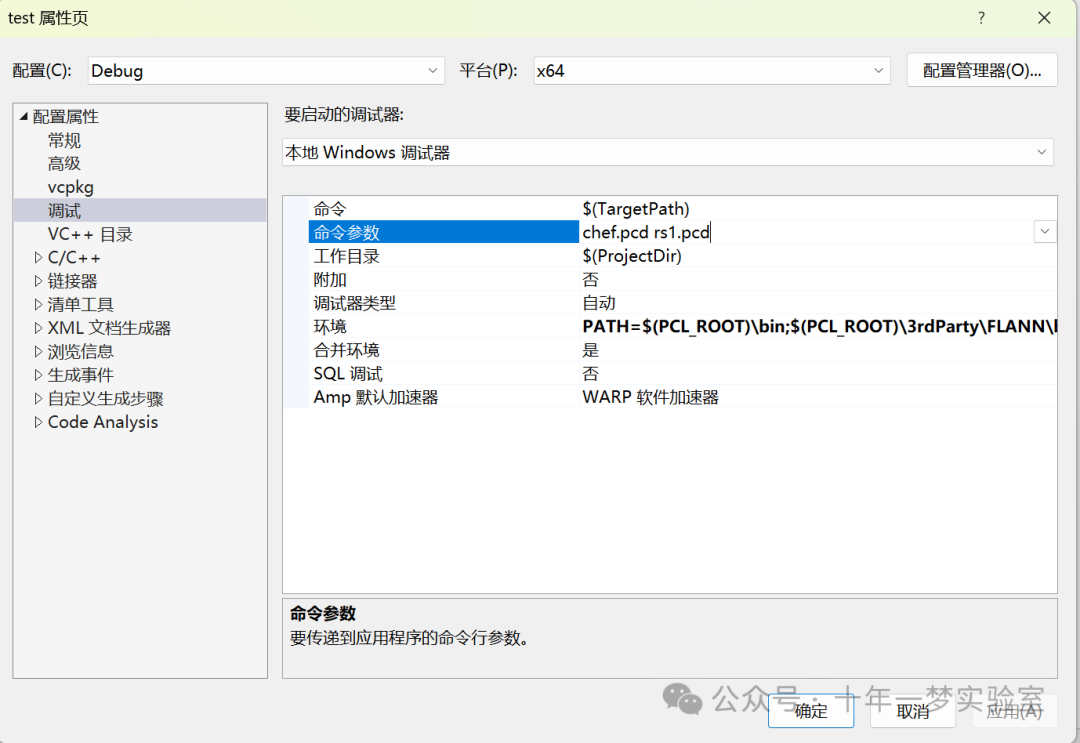
int
fake_main(int argc, char** argv);
int main() {
// 手动设置命令行参数
const char* arguments[] = { "chef.pcd", "rs1.pcd"};
int argument_count = sizeof(arguments) / sizeof(char*);
// 调用 fake_main 并传递参数
fake_main(argument_count, const_cast<char**>(arguments));
return 0;
}
// Align a rigid object to a scene with clutter and occlusions
//https://pcl.readthedocs.io/projects/tutorials/en/latest/alignment_prerejective.html#alignment-prerejective
int
fake_main (int argc, char **argv)
{
}
















 4114
4114

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









