 机械手运动控制详解:何时需要机器人学及控制系统开发步骤,
机械手运动控制详解:何时需要机器人学及控制系统开发步骤,




 文章探讨了机械手运动控制的复杂性,区分了何时可能不需要深入机器人学知识,以及在开发机器人控制系统时所需的关键步骤和涉及的学科。
文章探讨了机械手运动控制的复杂性,区分了何时可能不需要深入机器人学知识,以及在开发机器人控制系统时所需的关键步骤和涉及的学科。
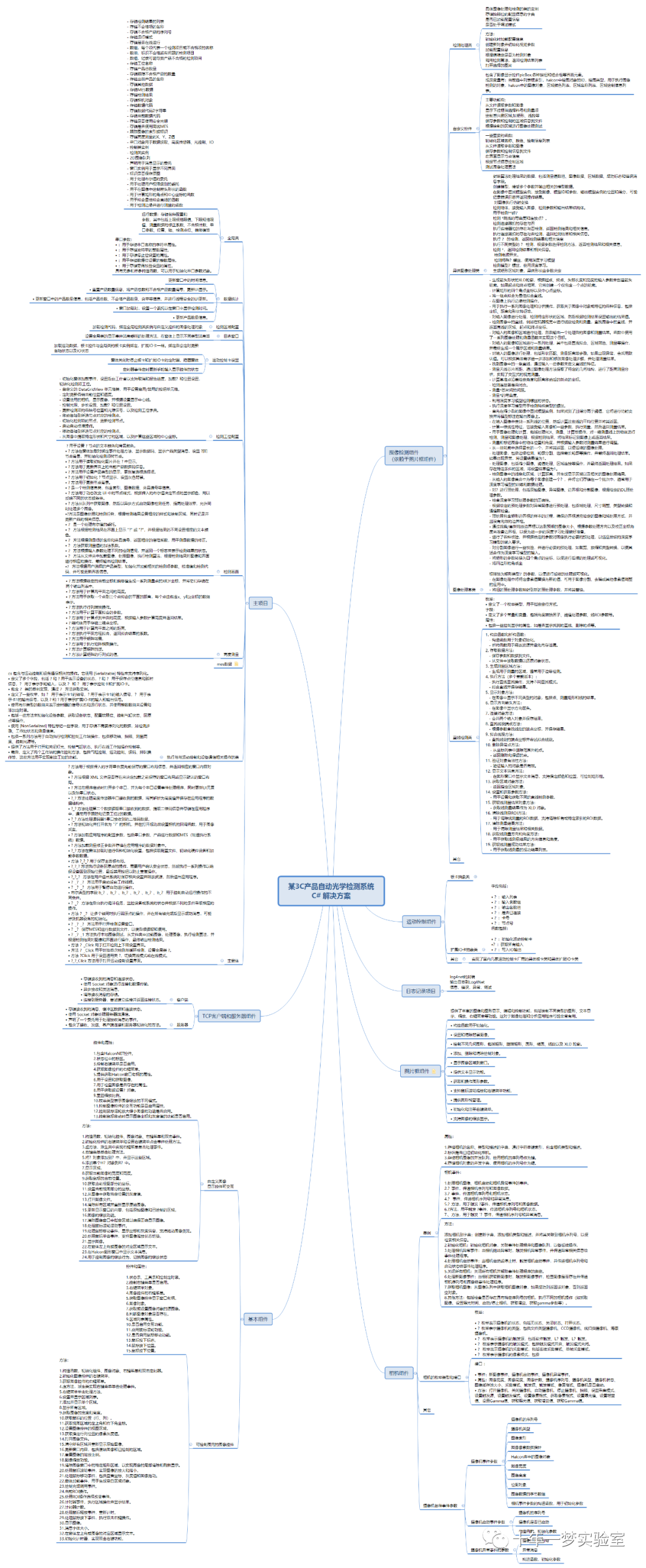
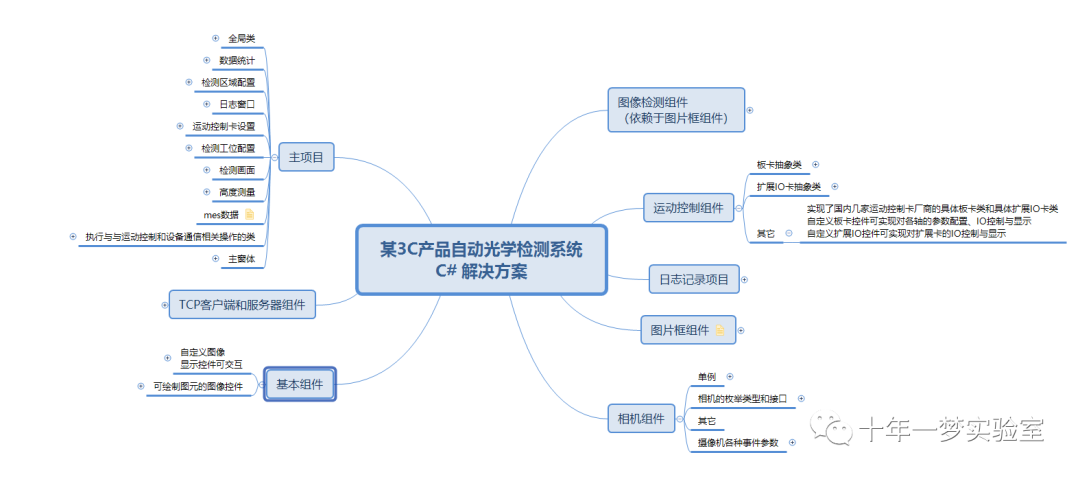
解决方案源码解析思维导图
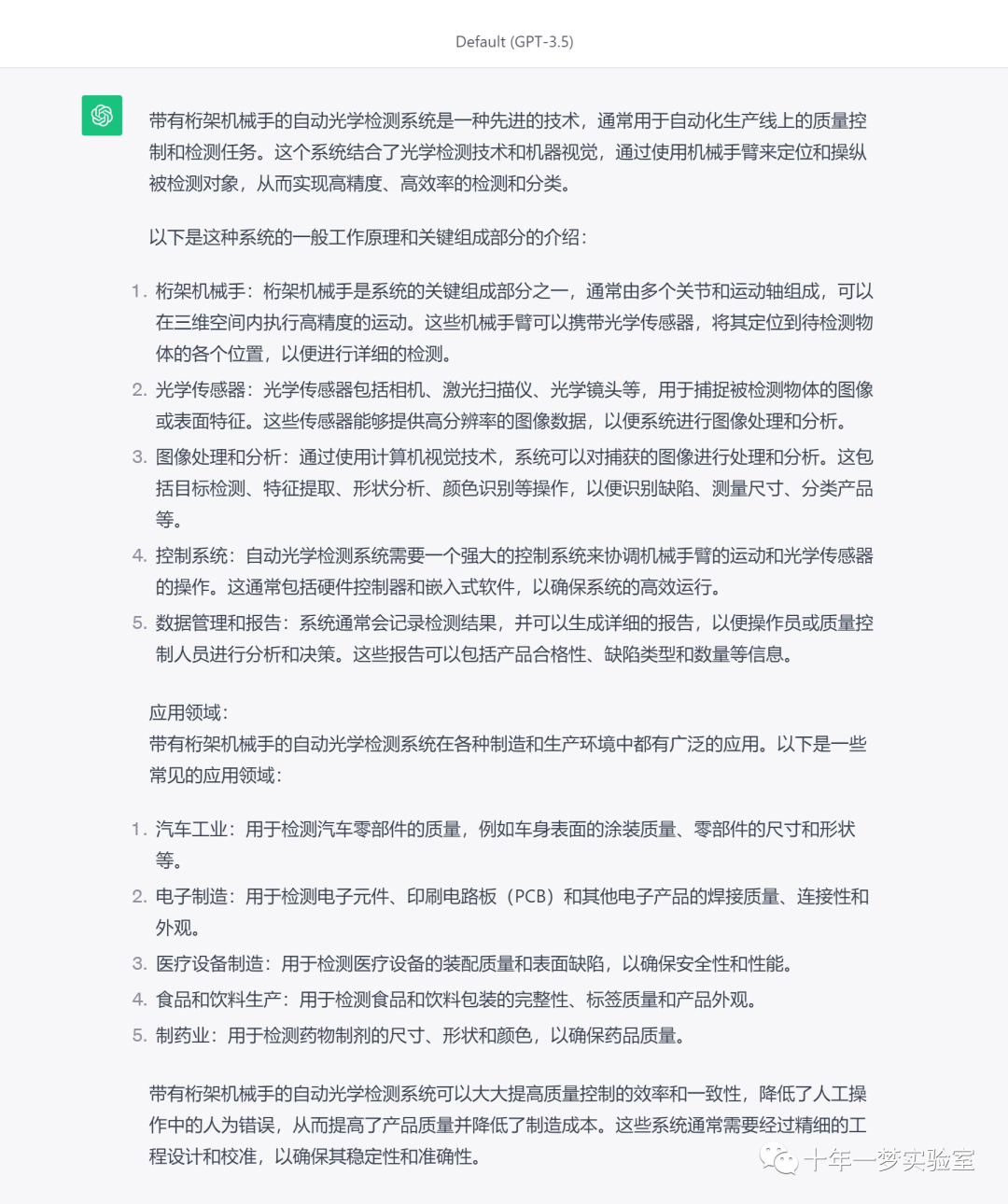
一、带有桁架机械手的自动光学检测系统介绍
二、关于机械手运动控制(是否需要机器人学方面的知识)
机械手的运动控制不需要深入了解机器人学方面的知识的情况包括:
预配置和任务单一性:如果机械手已经预先配置为执行特定的任务,并且这些任务相对简单,只涉及点对点的移动或基本的重复动作,通常不需要深入了解机器人学。
简单的点到点运动:当只需要将机械手从一个位置移动到另一个位置时,用户只需提供目标坐标或位置,并且机械手的控制系统可以自动计算和执行所需的运动,无需用户了解逆运动学等机器人学概念。
直观的用户界面:一些现代机械手提供了直观的用户界面,允许用户使用图形化工具或菜单操作,以执行任务、调整参数和记录路径,而不需要编写代码或进行复杂的编程。
预定义运动轨迹:对于特定任务,机械手可能已经具有预定义的运动轨迹,用户只需选择适当的轨迹,而不需要自己创建或调整。
应用领域的特定解决方案:在某些应用领域,例如自动化装配线、物流和包装,机械手系统已经经过设计和配置,以满足特定的运动控制需求,而无需用户深入机器人学领域。
尽管在上述情况下可能不需要深入机器人学知识,但具体情况仍然取决于所涉及的机械手和应用。对于更复杂的任务、自定义应用或需要高级控制功能的情况,机器人学知识仍然非常有用。此外,即使不需要深入了解机器人学,基本的运动控制原则和机械手的工作原理也对操作和维护机械手非常有帮助。
机械手的运动控制需要机器人学方面的知识的情况包括:
复杂的任务和运动规划:对于需要执行复杂任务的机械手,例如精确的三维定位、路径规划、轨迹跟踪等,深入了解机器人学是必要的。这涉及到逆运动学、正运动学、运动学模型等概念,以计算和规划关节角度和末端执行器的位置。
避免碰撞:机械手在复杂环境中工作时,需要能够检测和避免与障碍物的碰撞。机器人学知识可以用于开发碰撞检测和规划安全轨迹的算法。
多关节协调:机械手通常具有多个关节,需要协调它们的运动,以实现特定的任务。机器人学可以帮助你理解如何控制多个关节,以实现所需的运动。
传感器融合:在某些应用中,机械手需要融合多种传感器信息,如视觉、力/扭矩传感器等。机器人学知识有助于整合和利用这些传感器来实现更复杂的控制和反馈。
自主控制和决策:对于自主机器人,机器人学知识可以帮助开发自主决策和路径规划算法,以应对不断变化的环境。
高级控制:当需要进行高级控制任务,如机器人视觉、机器学习、轨迹优化等时,机器人学知识将非常重要。
总的来说,机器人学知识在需要更高级、复杂的机械手运动控制以及在需要机械手在复杂环境中操作时非常重要。机器人学提供了理论基础和工具,用于设计、规划和控制机械手的运动,以满足特定应用的要求。
三、如何开发机器人控制系统
开发机器人控制系统是一个复杂的任务,通常需要多个步骤和多学科的知识。以下是一般性的步骤和方法,用于开发机器人控制系统:
定义需求:
首先,明确定义机器人控制系统的需求。确定要执行的任务、性能指标、环境条件和预算。这将帮助指导整个开发过程。
选择机器人平台:
根据项目需求,选择适当类型的机器人平台,如工业机器人、移动机器人、桁架机械手等。选择的机器人平台应能够满足项目要求。
选择控制硬件:
选择适当的控制硬件,包括控制器、传感器、执行器等,以确保能够实现所需的运动和感知。
机器人建模:
建立机器人的数学模型,包括正运动学和逆运动学,以计算机器人的位置、姿态和关节角度。这些模型用于控制和规划机器人的运动。
运动规划和路径规划:
开发运动规划和路径规划算法,以确定机器人的轨迹和路径,以满足任务需求。这通常包括避免碰撞、最优路径规划等功能。
控制算法开发:
开发控制算法,用于控制机器人的关节或末端执行器,以达到目标位置和速度。常用的控制算法包括PID控制、模型预测控制、力/扭矩控制等。
传感器集成:
集成传感器,如编码器、激光扫描仪、视觉传感器等,以获得机器人的位置和环境信息。这些传感器用于反馈控制和感知环境。
开发用户界面:
创建用户界面,以供操作员配置机器人控制系统、监视机器人状态和执行任务。用户界面通常使用图形化工具来提供简化的操作。
软件开发:
开发控制系统的软件,包括运动控制、通信、数据处理和用户界面部分。选择合适的编程语言和开发工具。
测试和调试:
进行严格的测试和调试,确保机器人控制系统的性能、稳定性和安全性。模拟环境和实际硬件测试都是重要的。
部署和集成:
部署机器人控制系统到实际硬件平台上,确保机器人能够在实际工作环境中正常运行。进行必要的集成和校准。
维护和优化:
持续维护和优化机器人控制系统,以适应变化的需求和环境。这可能包括升级控制软件、传感器或硬件。
文档和培训:
创建适当的文档,以便操作员了解机器人控制系统的操作和维护。为操作员提供培训,以确保他们能够正确操作机器人。
整个过程需要协调多个领域的知识,包括机械学、控制工程、计算机科学和电子工程。机器人控制系统的开发是一个综合性的任务,通常需要一个跨学科的团队来完成。
The End

















 2184
2184

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









