



伤口闭合与吻合术用机器人腹腔镜夹合工具的开发与可行性
1 引言
缝合是每年进行超过一百万次的外科重建的重要组成部分[1]。几个世纪以来,开放手术的手术工具和缝线设计基本保持不变[2]。然而,在微创手术(MIS)中,外科医生必须使用腹腔镜工具通过小切口进行缝合。这种锁孔入路限制了外科医生的操作空间、灵活性和器械控制,使得缝合更加困难。胃肠道、泌尿科和妇科微创手术中的吻合术(管状再连接)等外科操作需要更复杂且费时的学习曲线,且并发症发生率仍然较高[3–5]。
在微创手术(MIS)中,高效且有效的吻合术对患者愈合至关重要[6,7]。在肾移植等手术中,吻合时间超过29分钟时手术结果更差[8]。平均而言,手工腹腔镜吻合术根据缝合组织的不同,可持续30至90分钟[9–11]。腹腔镜吻合器(如Endo GIA(美敦力,明尼阿波利斯,明尼苏达州))比手工缝合显著更快,且渗漏率和爆破强度更优[12]。然而,其线性形状和庞大占用空间会导致肠道狭窄增加[13],而环形吻合器的适用范围仅限于近端前肠和远端后肠[14,15]。两种腹腔镜缝合装置Endo StitchTM(Covidien,马萨诸塞州)和Endo360(EndoEvolution,雷纳姆,马萨诸塞州)[16]可使外科医生通过简化的动作进行手动缝合。与手工吻合相比,这些缝合工具在缝合时间和成本方面均有改善[17]。遗憾的是,术者间在技术、经验和决策上的差异仍直接影响吻合的一致性和质量[18]。
下一代腹腔镜吻合术工具应结合缝合的选择性、灵活性和准确性,同时融入机械操作的简化性和一致性。吻合器。我们的团队最近开发了智能组织自主机器人(STAR),用于监督下的自主吻合术[19]。STAR已被用于在猪动物模型中进行肠道吻合术,与手动技术相比,具有更高的一致性、精确性和改善的结果[20]。本工作的目标是将STAR的精确性和可重复性与腹腔镜单个夹子施加器相结合,以执行具有缝钉一致性但又具备缝线适应性的吻合术。
本文报告了一种用于单操作器伤口闭合和吻合术的机器人腹腔镜夹合工具的设计、开发及初步评估。该工具可部署可生物降解夹子和夹扣,旨在实现以下目标:(i)将抓取和缝合功能集成到单一设备中,供单手或单个操作臂使用;(ii)在无需管理缝线的情况下实施间断缝合;(iii)当安装在机械臂上时,能够实现完整的六个自由度(DOF)腹腔镜控制。本文结构如下:第2节回顾了执行无需打结的单手吻合术的要求,第3节描述了详细设计和工作流程,第4节回顾了初步测试结果,第5节对结果进行了讨论和总结。
2 夹钳工具的要求
腹腔镜夹钳工具是一种混合技术,结合了钉合和缝合技术的优点。夹钳机构能够在夹合前实现组织的对合,即将组织聚拢,而这是钉合器无法做到的。钉合器的钉子数量和密度是预设的,无法根据特定的伤口闭合或吻合术需求进行调整。通过部署单个夹子和夹扣,夹钳工具能够像间断缝合一样灵活地对合目标组织,同时消除了缝线管理所需的时间。此外,夹子沿组织边缘以恒定力量夹合,这可能降低如钉合技术中所观察到的裂开风险。表1总结了机械、操作、保持力、材料和尺寸要求,用于实现无需打结的单手吻合术。这些要求是在与经验丰富的外科医生进行详细讨论后制定的。
3 夹钳工具设计
3.1 总体设计与手术工作流程
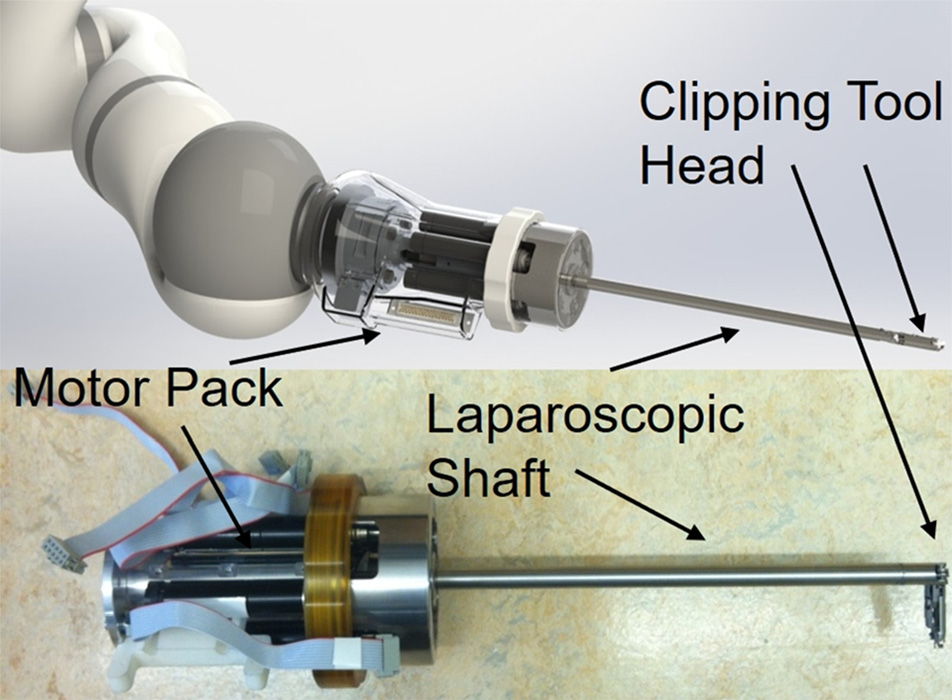
设计并制造了一种可用于吻合术的原型施夹器。该腹腔镜夹钳工具(图1)为缆线驱动,安装在五轴电机平台上,并连接至轻型机器人(LWR)(LWR 4+,KUKA,德国奥格斯堡)机械臂。该工具包含两个690度关节,以实现末端执行器定位时的腕部灵活性。该工具还配备有镊子钳口,可在环形针穿过目标组织的同时,独立抓取和操纵组织。注塑可吸收夹通过环固定在针上。当夹扣紧固在夹子上后,夹子便从针上剪切分离。夹和夹扣弹匣可在吻合术过程中应用八个夹子。快速连接接口便于灭菌,并易于从独立覆盖的机器人定位系统上拆卸。
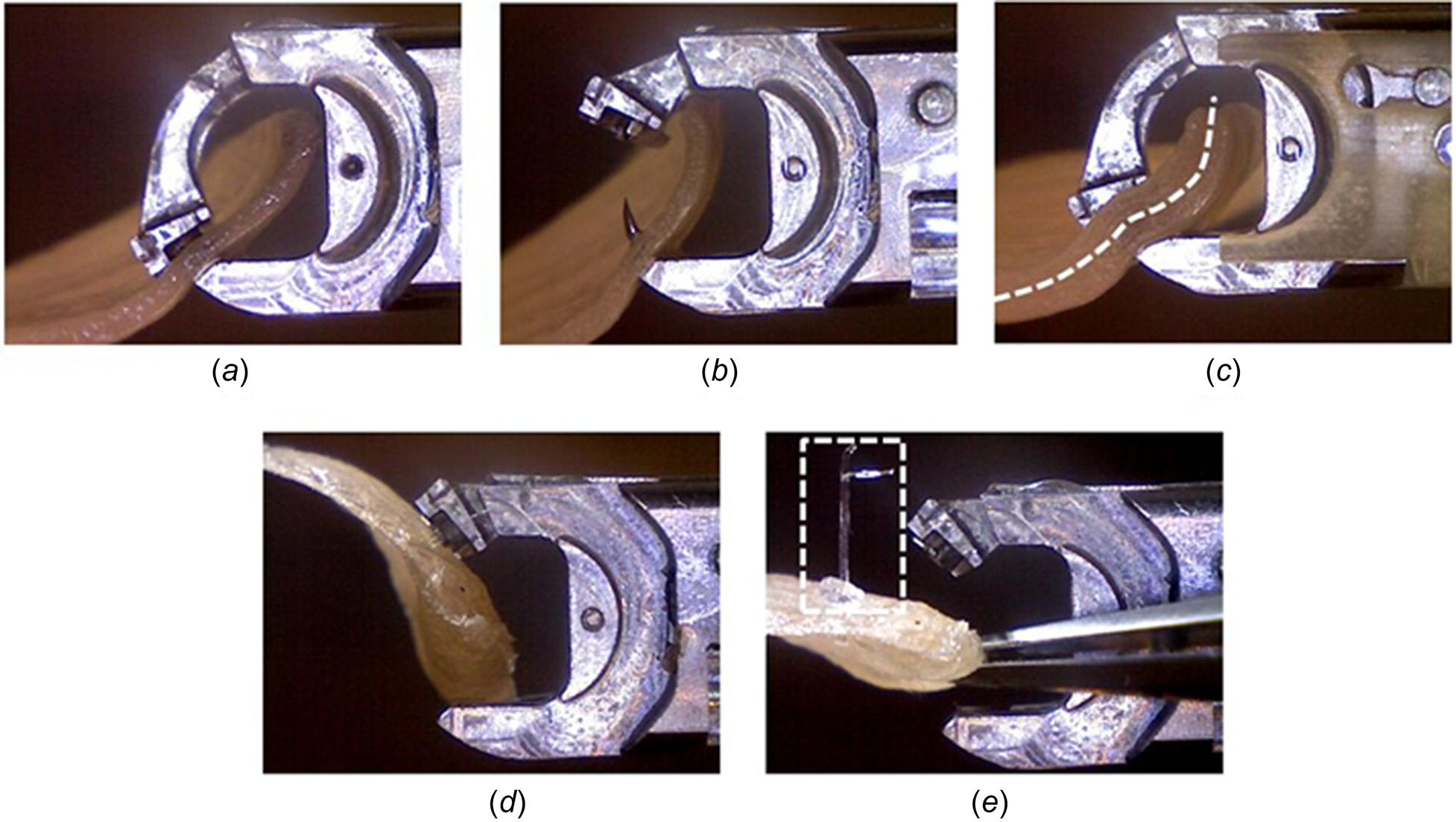
图2展示了用于侧侧吻合术的夹子和夹钳的临床工作流程。首先,使用镊子定位并夹住组织(图2(a))。固定后,将针推进至组织表面之外,然后将镊子恢复到打开状态(图2(b))。重新定位末端执行器后,可夹住第二层组织,并将带有夹子的针穿过组织。当T形夹脚接触第二层组织时(图2(c)),在针头推进与镊子轴同步的同时,对两层组织施加力,以将已抓取的组织拉回至夹钳工具顶部(图2(d))。一旦定位完成,便将夹子施加到夹子上以固定组织(图2(e)),同时将夹子从针上剪切分离。
3.2 夹子与夹扣设计
夹钳工具通过旋转针部署直径为0.28毫米的可生物吸收夹子,其大小相当于2‐0号缝线,见图3。
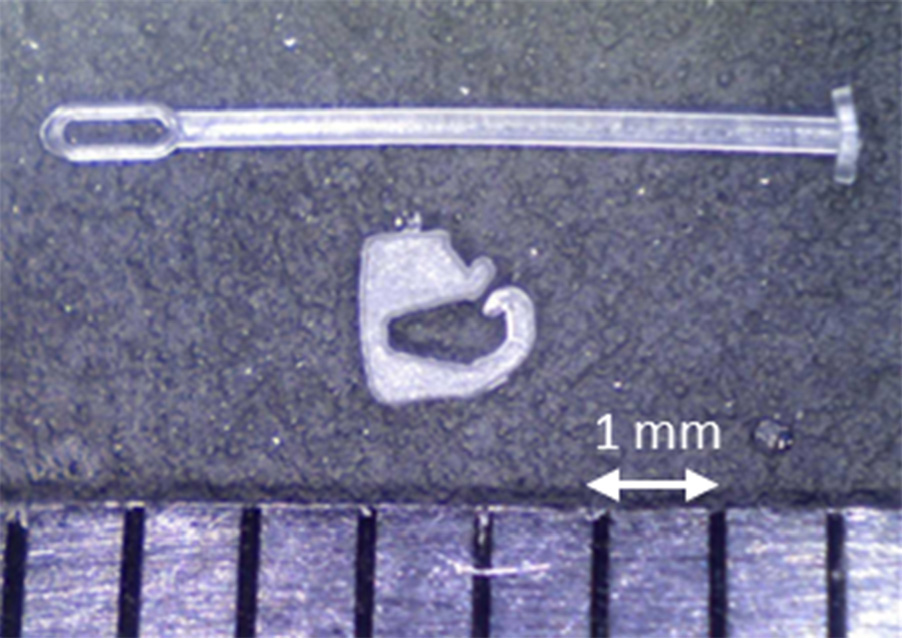
夹子通过一个环连接到针上。将夹子穿过组织,直到T形端压紧在组织侧面。然后穿过组织收紧夹子,并将夹子固定在夹扣周围。夹子与市面上可获得的LAPRA‐TY(爱惜康内视镜外科,新泽西州萨默维尔)类似。夹子和夹扣采用可生物吸收的聚(乳酸‐共‐乙醇酸)(PLGA)材料(PLG8218,MTD微型注塑,马萨诸塞州查尔顿)注塑成型,以避免在体内留下永久性异物。
夹子的锁扣设计为实现超过1牛顿的保持力,以便在愈合过程中近似组织时不会产生无血管区域[21]。使用有限元分析软件(FEA软件)通过有限元分析(FEA)对夹子的保持力进行了模拟(NASTRAN),见图4。采用四面体单元和广义表面接触进行首次多步非线性分析,以生成夹子/夹头压痕的力‐位移曲线。夹子杆采用双重对称建模,而“夹子”则采用平面对称建模,如图4的右侧面板所示。在强制偏转条件下将夹子向下移动,并从每个
| 类别 | 要求 | 数值 | 描述与依据 |
|---|---|---|---|
| 机械 DOFs | 2自由度(俯仰加偏航)用于工具,6自由度整体 | 实现完全位置和姿态控制 | 在腹腔镜约束下,使用夹子工具需要具备2自由度和6自由度整体与机械臂一起 |
| 机械 工作空间 | 5 cm³ | 大多数吻合术可以在5×5×5 cm³区域内执行 | |
| 机械 角度 | 俯仰和偏航均为±90° | 具有完整90度范围的腕式工具,适用于俯仰和偏航 | |
| 机械 连接 | 模块化 <1min | 用于模块化和可更换工具的快速连接,由技术人员在不到1分钟内完成 | |
| 操作 操作模式 | 单个机械手能够同时抓取两侧粗组织直至愈合 | 单机械手设计,能够抓取并近似两个独立的部分组织并提供保持力直到伤口已愈合 | |
| 力 夹子的持力 | >1 N | 1牛顿是达到最小持力所需的保持力,伤口愈合无分离 | |
| 材料 生物降解 | >2周 | 2周是夹子需要的最短时间提供保持力,伤口已足够愈合 | |
| Size 工具和夹子尺寸 | 工具轴直径≤10 mm,夹子尺寸≤2‐0号 | 该原型的工具轴直径不应大于10 mm且夹子不应大于标准2‐0缝线 |
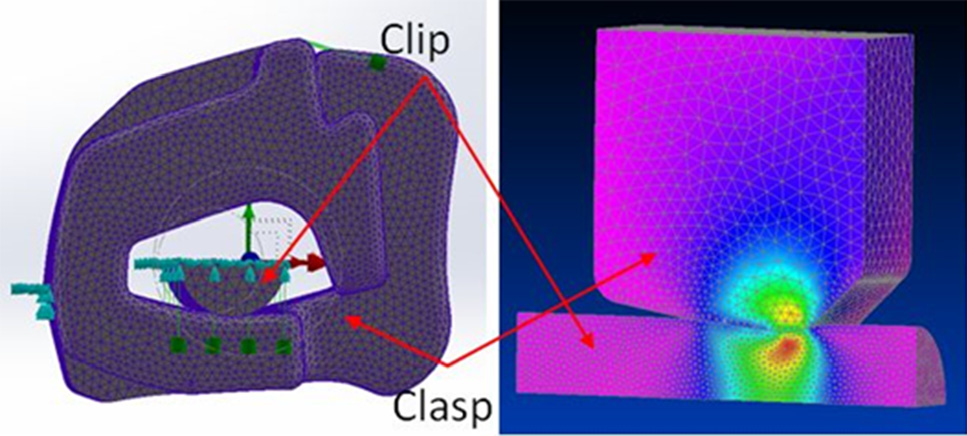
逐步调整直至确定理想的夹持力为4.02牛(表2)。
进行了第二次使用四面体单元和广义表面接触的多步非线性分析,以确定夹子几何结构是否能够承受夹持力。分析包含同时进行的两种情况:夹子闭合和夹片向下平移。图4左侧所示结果表示当夹子在4.02牛载荷下的响应与夹子压痕相匹配时的情况。分析在底边处施加约束以允许局部旋转,并在侧向的中性点处保持稳定。载荷通过强制位移施加,首先作用于夹子顶部,其次作用于夹片向下方向。根据有限元分析,锁扣夹子提供的4.02牛捏合力产生了夹片挠度0.48毫米。对于压力恒定的静态模型,夹子的静摩擦力相当于夹子的保持力。假设摩擦系数为0.1,则计算出的静摩擦力为1.26牛顿。
完整的扣合机构在第3.3节中描述。该工具采用夹子匣设计,位于下钳口和工具本体之间。匣的位置使夹子的环与针道对齐,以便在针头推进过程中从匣中拉出夹子。夹子匣为弹簧加载,可自动将新的夹子推进到针道中。每个匣最多可释放八个夹子而无需重新装填。
3.3 夹合工具头设计
夹合工具头包含三个钢缆驱动装置和第四个机构:(a)钢丝驱动的镊子钳口,用于在吻合过程中抓取并固定组织;(b)钢丝驱动的针驱动装置,用于推进环形针;(c)钢丝驱动的夹子剪切器,用于在夹子紧固于夹环后将夹子与针分离;(d)与镊子耦合的扣合机构,用于将扣环固定到夹子上。
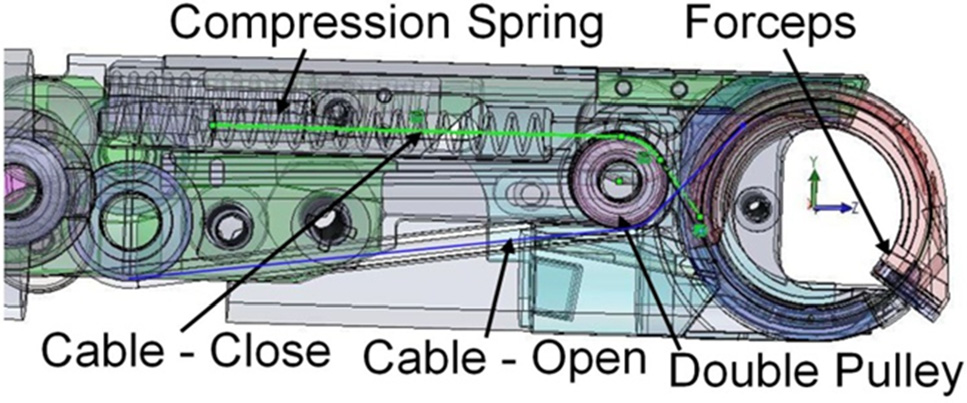
镊子机制:图5显示了夹钳工具头的计算机辅助设计图片,并说明了镊子机制的组件。该镊子为常闭式,通过拉动连接到镊子的钢丝使其沿旋转路径打开。闭合力由连接到镊子(通过第二根钢缆)的压缩弹簧提供。通过调节止挡块的位置来调整闭合力。弹簧加载闭合设计限制了镊子的闭合力,减轻了组织损伤的可能性。
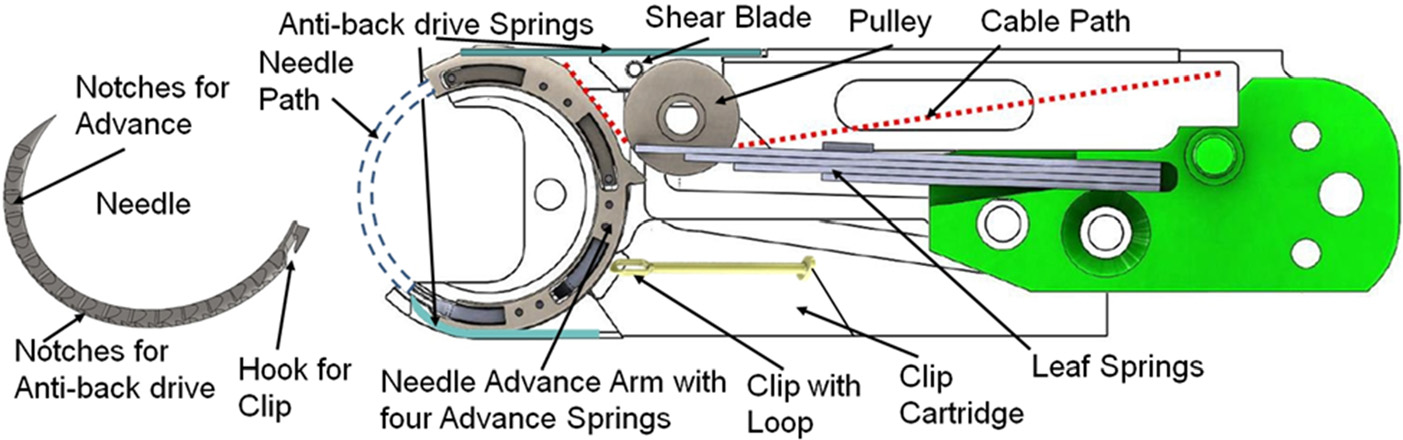
针推进机构:针推进由一个旋转棘轮机构组成,其中拉线驱动针推进臂在旋转轨道内运动(图6)。针推进臂通过四个焊接的推进弹簧,每隔10度与针上的凹槽啮合一次。针回退由一组片簧完成。防倒转弹簧与针外侧每5度设置的凹槽啮合,防止针向后滑动。该棘轮机构使针沿环形针道每拉动一次拉线前进10度。针钩用于从匣中拾取夹子,并将其拖拽通过针道底部,最终在组织中部署夹子。
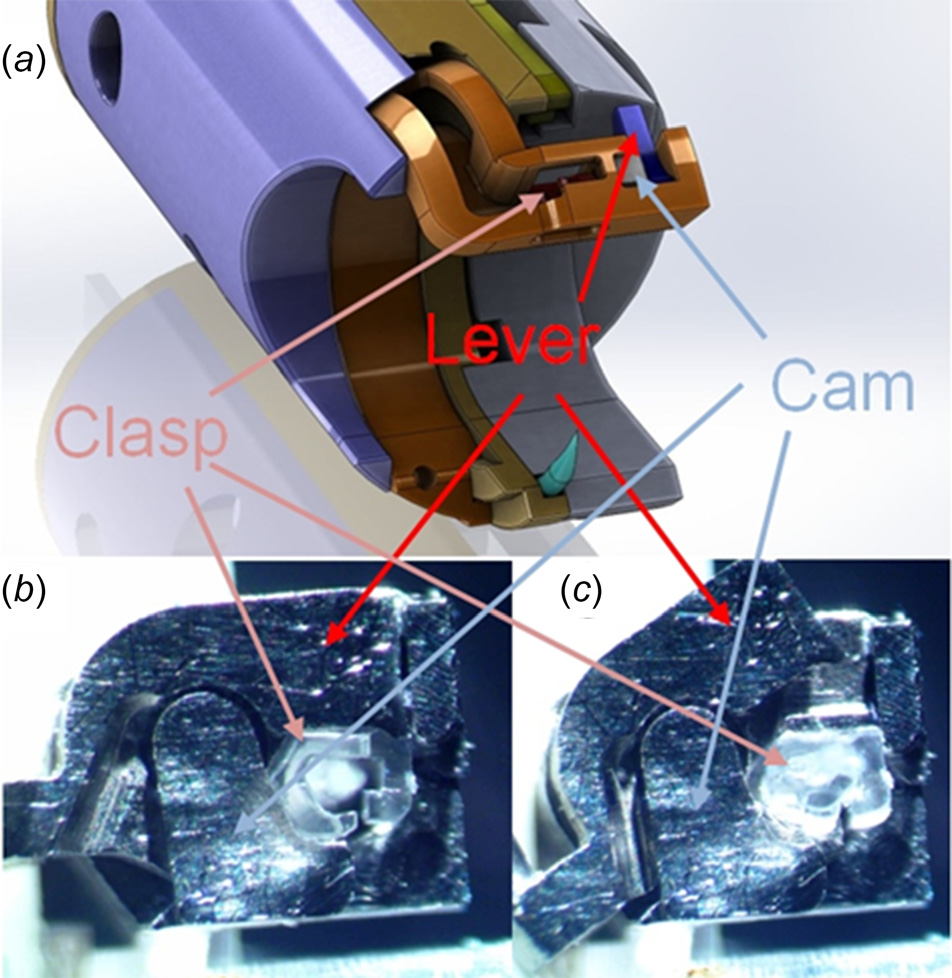
扣合机构:扣合机构(见图7)通过钳子张开而启动,压下杠杆作用于夹合工具头的外壳。该运动同时驱动凸轮推动夹子的锁扣,直到夹子在夹子周围闭合。剪切夹子的环后,镊子再次轻微张开以释放夹子。
剪切机制:为了从夹持工具和针头中释放夹子,使用剪切刀片切断夹子上的环。通过夹合工具头内部线性轨道中的钢丝驱动的剪切刀片来实现对环的剪切(见图6)。类似于镊子机制,剪切闭合力由连接到剪切刀片的压缩弹簧通过钢丝提供。
3.4 电机组件和驱动
设计并制造了一个五轴电机平台,用于使夹钳工具运动并驱动该工具,并将其安装到LWR机械手上(见图1)。前两个旋转轴驱动±90度关节,以实现夹钳工具定位时的腕部灵活性。第三个旋转轴负责启动夹子的剪切。第四轴驱动针头前进,第五轴驱动镊子钳口。图8展示了钢丝驱动驱动的示意图。每个轴的控制通过EPOS2控制器(Maxon电机,瑞士萨克斯伦)实现,这些控制器通过控制器局域网通信控制直流有刷电机(Maxon电机)。一个带有单个弹簧加载推针的接口将电机的旋转运动耦合到工具上。单个大螺钉便于工具与电机组件快速连接,实现安装和拆卸(图1)。腹腔镜工具的轴径为10毫米。

4 测试结果
机械测试 :经过仔细的装配和调试后,确认了夹钳工具每个机构的功能正常。夹具关节运动通过俯仰和偏航关节在完整的±90度范围内成功测试。镊子的开合工作良好。夹钳的针驱动工具在驱动弹簧磨损之前,成功完成了针的700次连续旋转。在30次连续运行中,针成功拾取了夹子,随后实验停止。通过连续剪切三个夹子环,也确认了夹子剪切装置的基本功能,直到剪切刀片磨损为止。驱动弹簧和剪切刀片的磨损导致无法使用此第一个原型进行更广泛的测试。
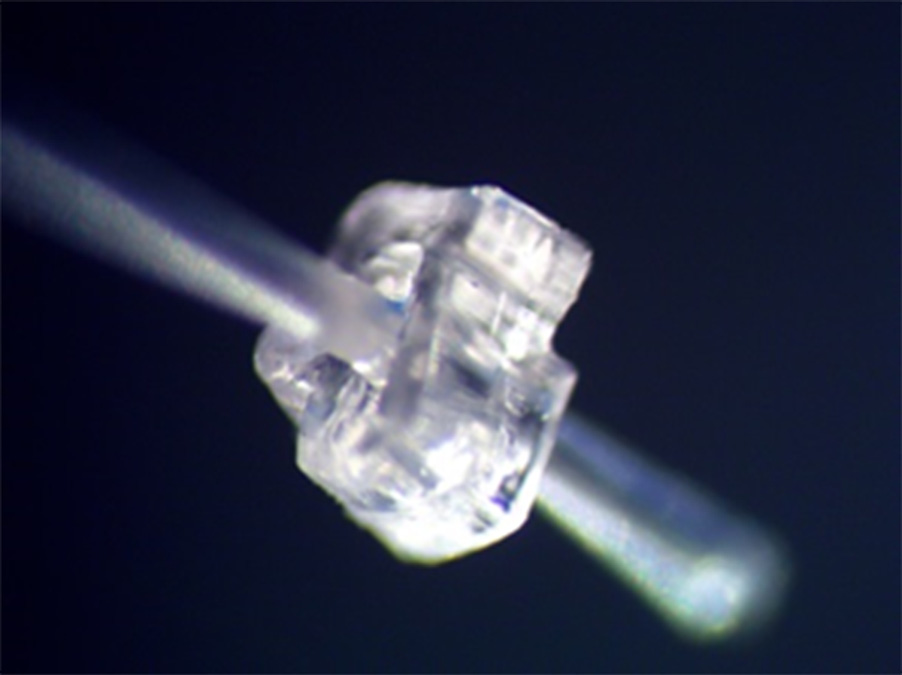
夹子测试 :为了测量最大持力,将一个可生物吸收的PLGA夹扣闭合到一个夹子上。夹子脚部固定在虎钳上,同时将夹扣固定在力传感器上。轴向拉动力传感器,直到夹扣从夹子上滑脱。记录夹扣与夹子脱离时的瞬时力作为最大持力。然后重复该测试,共测试六个夹子和夹扣。所有六个夹扣均成功锁扣到夹子上,平均保持力为2.00±0.27 N,超过了有限元分析结果,并且高于伤口闭合和吻合所需近似组织的要求。图9显示了夹扣成功锁扣到夹子上的一个示例。
| 表2 六次连续可生物降解夹子锁扣的保持力结果 |
|---|
| 实验 夹子材料:PLG8218 夹子材料:聚丙烯 |
| 样本 |
| 6 |
| 5 |
| 4 |
| 3 |
| 2 |
| 1 |
| Mean |
| 标准差 |
在成功完成保持力测试后,使用夹钳工具进行侧侧吻合术,见图2。要求一名专家操作员使用该工具在模拟小肠组织(Syndaver Tampa, FL)中施加三个连续夹子。操作员成功激活镊子钳口以对合合成组织,同时操作针头推进,在两层合成组织上放置全部三个夹子。通过激活夹扣与剪切机构,将PLGA夹扣应用于每个夹子,从而将每个夹子固定到位。
5 讨论与结论
本文报道了一种用于单操作器伤口闭合和吻合术的机器人腹腔镜夹钳工具的设计、开发及初步评估。该工具在保持机械缝合技术优势和工作流程的同时,消除了打结和缝线管理的需求。这种腹腔镜夹钳工具是迈向快速简便的单手操作器吻合术的一项技术进步,可作为新型手持工具、远程操作机器人辅助手术工具或自主机器人吻合术工具应用。
多次测试运行的结果显示:(a)可重复的环形针头驱动成功,(b)夹子的拾取和部署成功,(c)成功剪切夹子以将其从针头释放,(d)夹子与夹扣扣合时具有平均2.0 N保持力,超过有限元分析结果,并高于伤口闭合和吻合术中组织近似所需的要求。数据表明,该机器人腹腔镜夹合工具可用于腹腔镜伤口闭合和吻合术。
未来,我们计划开发一种夹钳工具的改进版本,该版本将采用更耐磨的金属材料进行原型制作,并使用更可靠的技术进行加工。新的驱动机构将采用更坚固的材料制造更厚的驱动弹簧,以减少机械磨损。更大的表面积也将提供更好的焊接效果,从而提高每片片簧的使用寿命。此外,剪切刀片将采用研磨外科钢进行原型制作,所得刀片的性能将类似于手术刀。最后,该工具将完全集成到机器人平台中,实现机器人驱动,并设计为可灭菌,以进行临床前测试。新型夹钳工具将在可用性及对比研究中与标准腹腔镜下间断缝合技术进行试验比较。专家外科医生将被要求执行小肠吻合术,样本将针对操作时间、夹或缝合间距以及产生的爆破压力进行比较分析。

















 25
25

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









