




Gazebo是3D物理仿真平台,强调的是创建一个虚拟的仿真环境。
Rviz需要已有的数据,而Gazebo可以创造数据。我们可以在Gazebo中创建一个机器人世界,不仅可以仿真机器人的运动功能,还可以仿真机器人的传感器数据,而这些数据就可以放到Rviz中显示,所以使用gazebo的时候,经常也会和rviz配合使用。
文章用提到的一些源码地址: 冰达机器人
rqt 工具:
(1) rqt_graph: 查看节点之间的发布--订阅关系
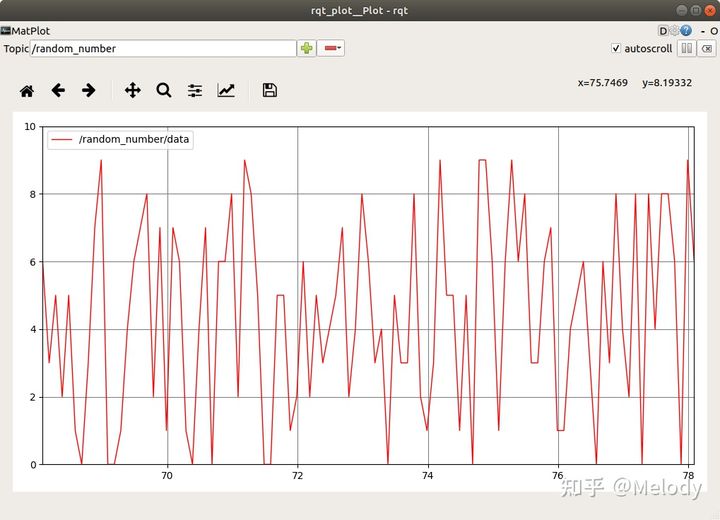
(2) rqt_plot: 实时显示一个发布到某个话题上的数据变化图形
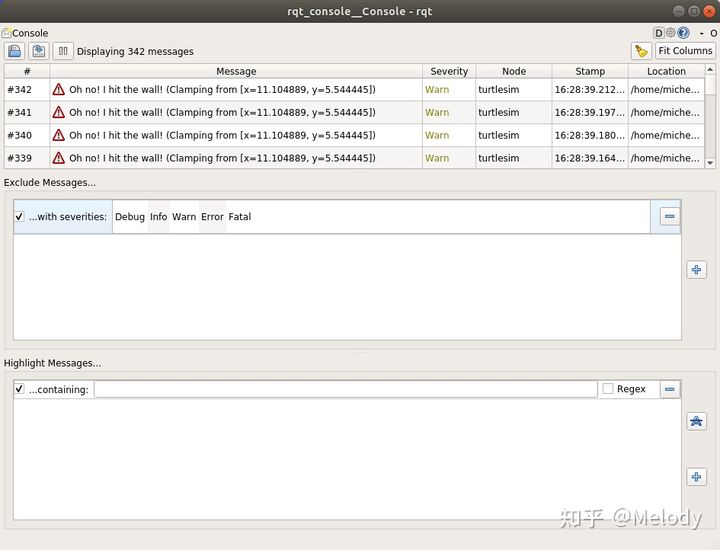
(3) rqt_console: 显示来自所有节点的日志
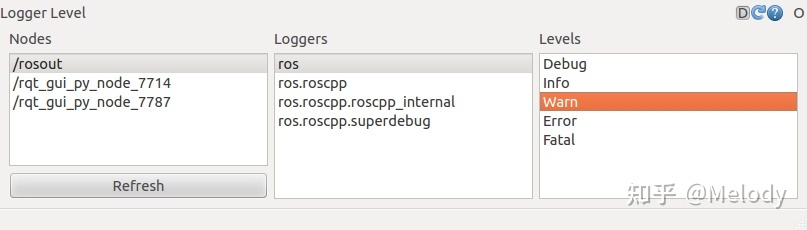
(4) rqt_logger_level : 通过图形界面设置日志级别
gazebo
仿真平台,创建数据
启动:roslaunch gazebo_ros *
第一次启动会非常慢,因为服务器在国外 !
或者去网站上下载离线软件,就不用通过服务器加载,启动的速度会快很多。
安装: Ubuntu 20.04 Gazebo安装 及模型库下载_Ananke_Z的博客-优快云博客_gazebo模型下载
cd ~/.gazebo/
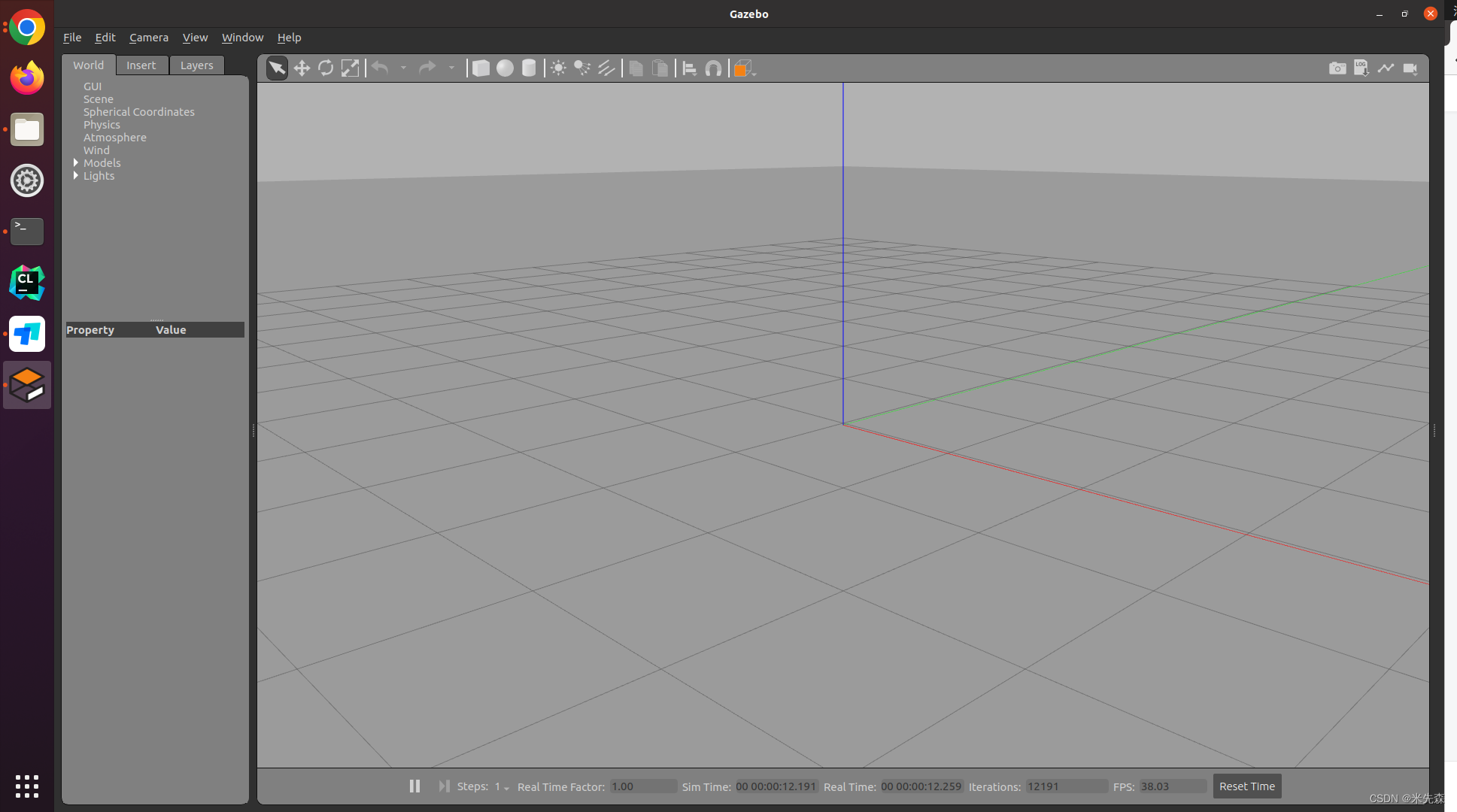
Gazebo 界面的介绍:
ROS 常用的shell命令:
(1) roscore
(2) rosnode list
(3) rosnode info /(info 后面需要带一个参数,节点名字 摁tab建可以提示补全)
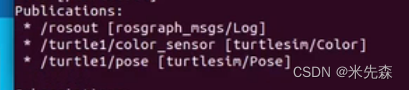
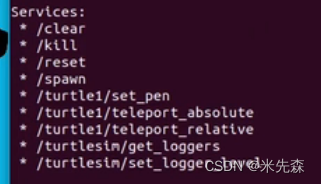
比如:rosnode info /turtlesim(小乌龟节点),列出的信息如下:
1. 节点的名称

2. 发布的话题
3. 订阅的话题

4. 有哪些服务
5. 跟哪些节点有链接关系
(4) rostopic :
rostopis list 列出当前活跃的话题
rostopic info /话题名 可以查看话题之间的发布订阅者之间的关系,以及话题的数据类型
单独编译功能包:
catkin_make --pkg 功能包的名字 回车编译执行
比如: catkin_make --pkg LIO-SAM
功能包提前准备:
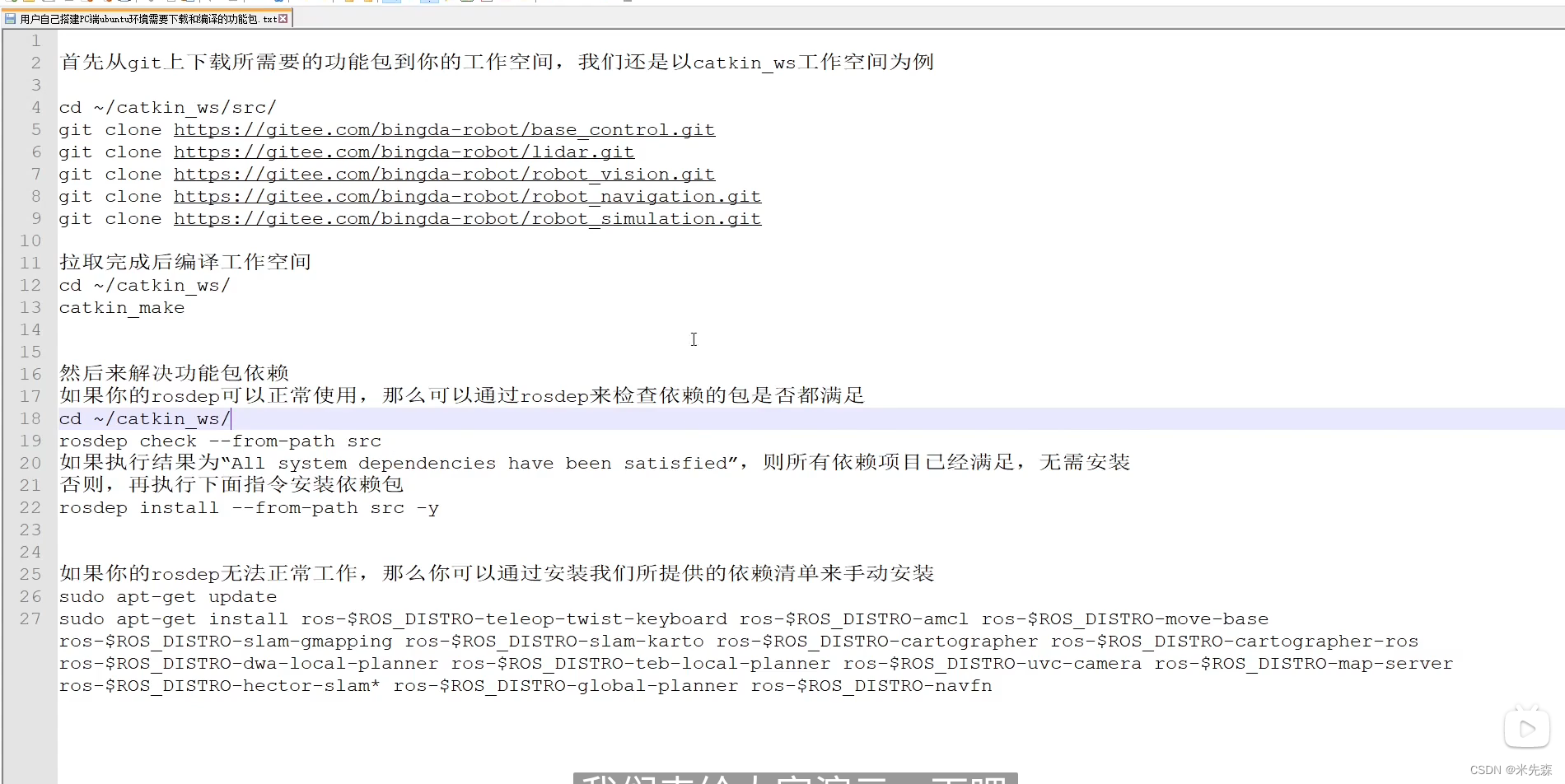
git 下载完功能包之后,查看依赖是否安装上了。。通过rosdep检查
终端进入catkin_ws 输入: rosdep check --from-path src
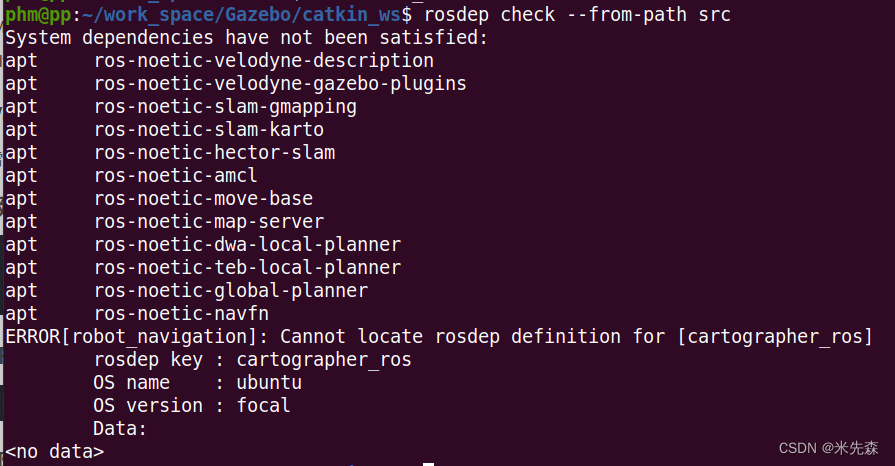
如果没有,输入安装 : rosdep install --from-path src
Gazebo 和 环境模型准备、机器人模型设计、为模型上装备传感器和执行器
1、实验目标和实验准备
目标:设计出一台具备激光雷达、IMU和相机的机器人仿真模型用于相关的实验。
2、GAZEBO 的使用和world 创建
(1) 确认gazebo 软件可以运行
终端输入: gazebo 来启动软件
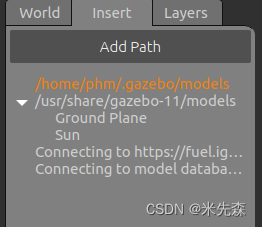
(2) 给环境中添加
通过窗口中的 “Insert” 按钮,里面有自己的存放模型的目录,也有远端的服务器,服务器加载会比较慢。。
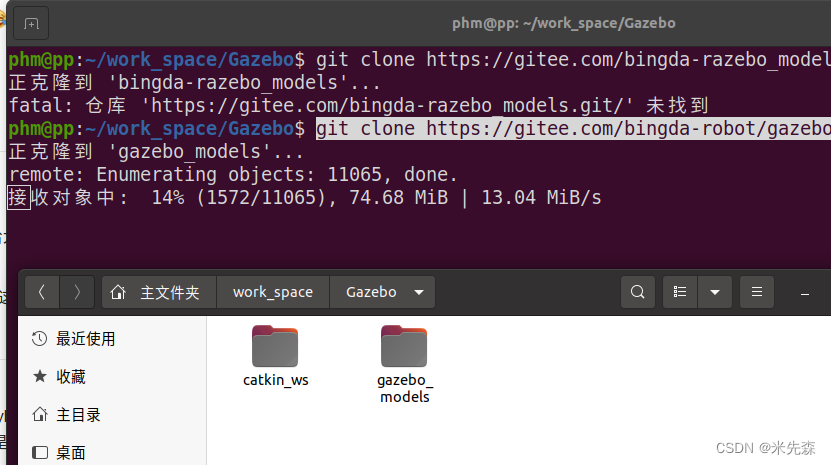
视频作者在Gitee上存放了模型, 使用git clone可以直接下载:
git clone https://gitee.com/bingda-robot/gazebo_models.git
模型库1.3G
(3) 下载完之后打开隐藏目录,一般是不会显示,需要通过 "Ctrl + H " 切换显示
找到 .gazebo 目录, 打开,里面有gezebo_models目录,里面存放的就是
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









