Apollo_ADS_CyberSecurity
最新推荐文章于 2024-12-29 10:34:44 发布





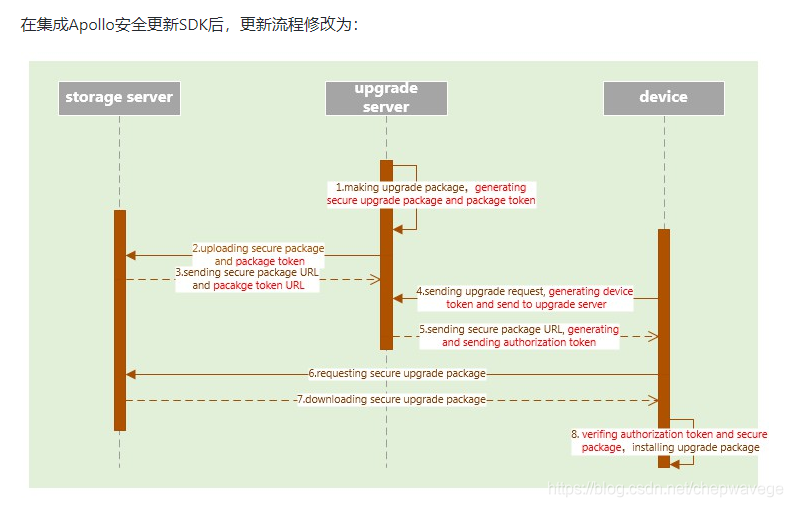
 博客提及Apollo安全更新SDK,并给出相关文档链接https://github.com/ApolloAuto/apollo/blob/master/docs/specs/apollo_secure_upgrade_user_guide-CN.md ,为了解该SDK提供指引。
博客提及Apollo安全更新SDK,并给出相关文档链接https://github.com/ApolloAuto/apollo/blob/master/docs/specs/apollo_secure_upgrade_user_guide-CN.md ,为了解该SDK提供指引。
博客提及Apollo安全更新SDK,并给出相关文档链接https://github.com/ApolloAuto/apollo/blob/master/docs/specs/apollo_secure_upgrade_user_guide-CN.md ,为了解该SDK提供指引。
博客提及Apollo安全更新SDK,并给出相关文档链接https://github.com/ApolloAuto/apollo/blob/master/docs/specs/apollo_secure_upgrade_user_guide-CN.md ,为了解该SDK提供指引。
 3666
3666

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言