




《基于运动状态自适应的互补滤波器方法与标准互补滤波对比》,代码实现基于运动状态自适应的互补滤波器方法,并与标准互补滤波方法进行比较。背景为IMU中的加速度计与陀螺仪数据融合下的角度估计,尤其是在导航和定位领域的应用场景中,能够有效处理陀螺仪和加速度计数据的噪声和漂移问题。
关键功能
仿真数据生成:
- 生成真实角度和角速度,模拟陀螺仪和加速度计的输出数据,同时添加噪声和漂移以增强真实感。
标准互补滤波:
- 使用固定权重系数对传感器数据进行融合,进行角度估计,展示了基本的互补滤波原理。
运动状态自适应互补滤波:
- 根据传感器数据的变化动态调整权重系数,以提高在不同运动状态下的估计精度。
- 通过检测加速度和角速度的变化,来决定在动态和静态状态下对传感器数据的信任程度。
结果可视化:
- 绘制真实角度、加速度计和陀螺仪的数据,以及两种互补滤波方法的估计结果,便于直观比较。
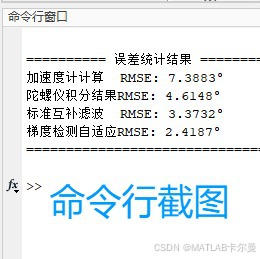
- 计算并绘制各方法的估计误差及均方根误差(RMSE),用于量化性能。
代码结构
- 数据生成部分设置了时间向量、真实的运动状态以及模拟的传感器数据。
- 互补滤波部分通过循环计算实现角度的估计,并对比两种方法的效果。
- 最后通过多个图表展示了结果,包括原始数据、滤波结果及误差分析。
运行结果
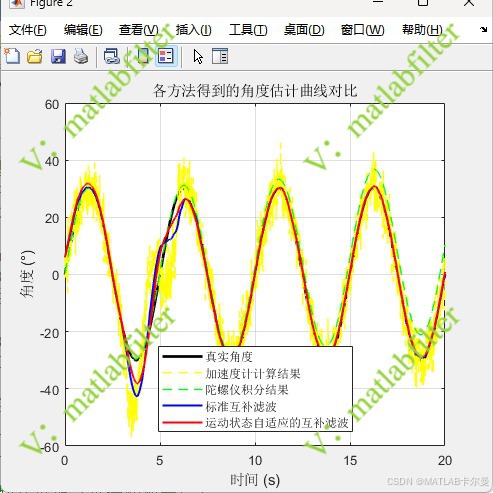
各方法估计的角度曲线:
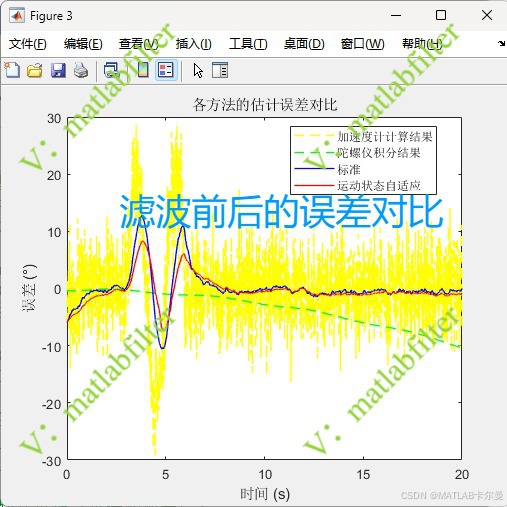
误差曲线:
RMSE对比的柱状图:
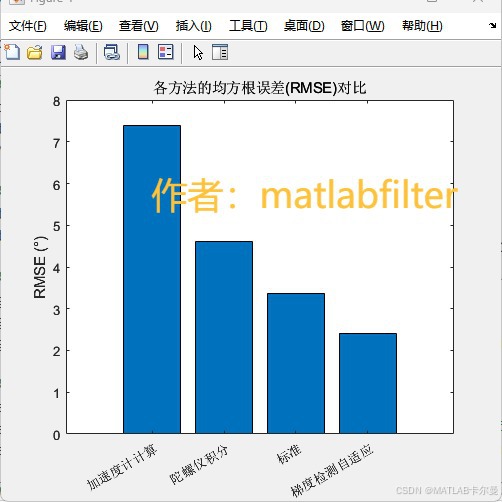
数值对比:
MATLAB源代码
部分代码如下:
%% 基于运动状态自适应的互补滤波器方法与标准互补滤波对比
% 作者:matlabfilter
% 2025-10-26/Ver1
clear; close all; clc;
rng(0);
%% 生成仿真数据
dt = 0.01; % 采样时间
t = 0:dt:20; % 时间向量
N = length(t);
% 真实角度 (正弦运动)
true_angle = 30*sin(2*pi*0.2*t);
true_angular_vel = 30*2*pi*0.2*cos(2*pi*0.2*t);
% 陀螺仪数据 (带漂移和噪声)
专栏文章中有完整代码:
https://blog.youkuaiyun.com/callmeup/article/details/153931956?spm=1011.2415.3001.5331
或通过下方链接下载单个m文件:
https://download.youkuaiyun.com/download/callmeup/92206078
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 361
361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











