





关于工具箱
本文所述的代码需要基于PSINS工具箱,工具箱的讲解:
本文为二维平面上的定位,另有三维的:
- 【PSINS】以速度和位置作为观测量(即6维观测量)的组合导航滤波,EKF实现,提供可直接运行的MATLAB代码:https://blog.youkuaiyun.com/callmeup/article/details/144404734?spm=1011.2415.3001.5331
运行结果
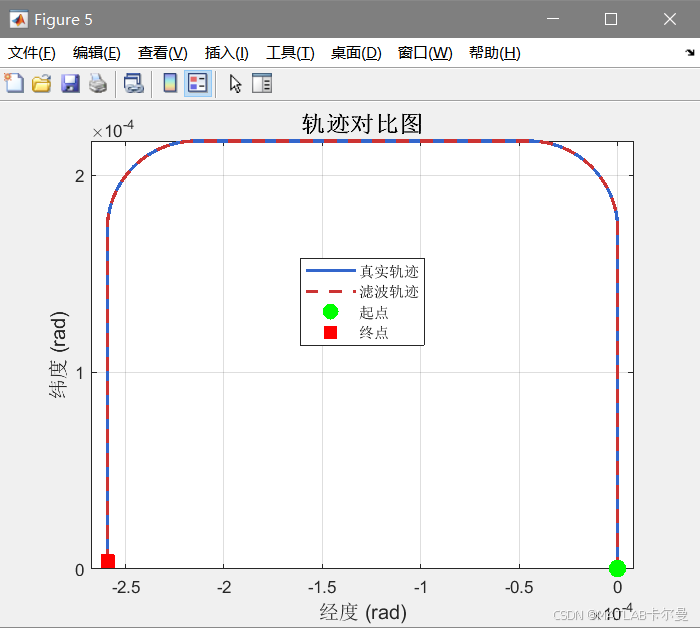
二维轨迹图像:
航向角误差曲线:
本文所述的代码需要基于PSINS工具箱,工具箱的讲解:
本文为二维平面上的定位,另有三维的:
- 【PSINS】以速度和位置作为观测量(即6维观测量)的组合导航滤波,EKF实现,提供可直接运行的MATLAB代码:https://blog.youkuaiyun.com/callmeup/article/details/144404734?spm=1011.2415.3001.5331
二维轨迹图像:
航向角误差曲线:
 1477
626
1477
626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文

























