





代码实现基于到达时间差(TDOA)的水下AUV(自动水下航行器)导航仿真系统,旨在通过模拟AUV在三维水下环境中的运动,利用水声信标来估算AUV的位置。仿真系统包括四个声学信标,并通过TDOA定位技术迭代求解AUV的实时位置。
运行结果
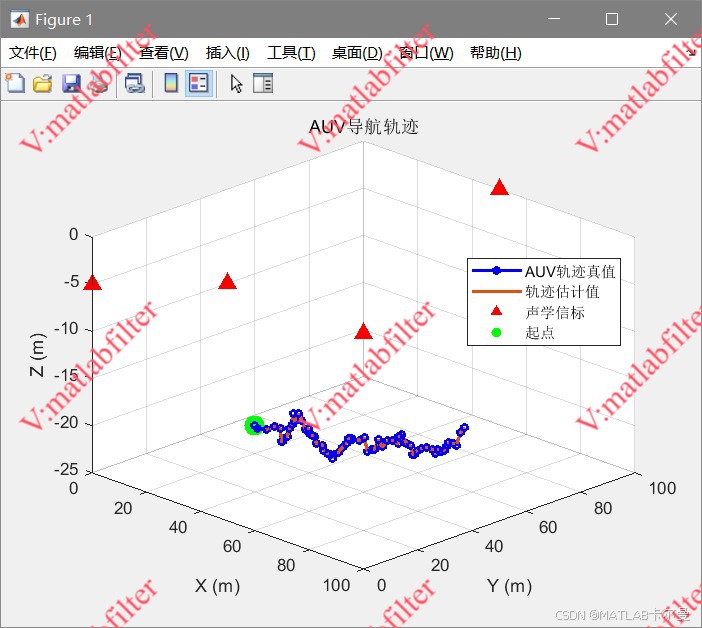
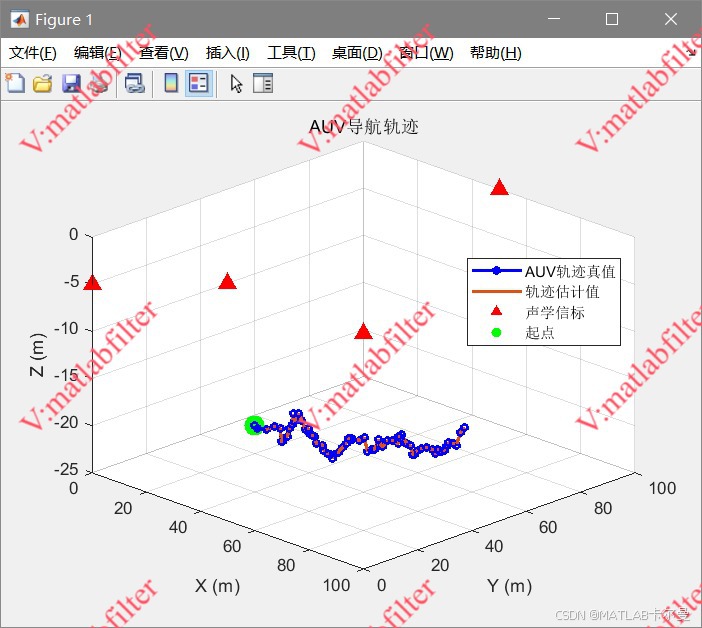
导航轨迹(含真值与估计值轨迹的对比):
定位误差变化曲线:
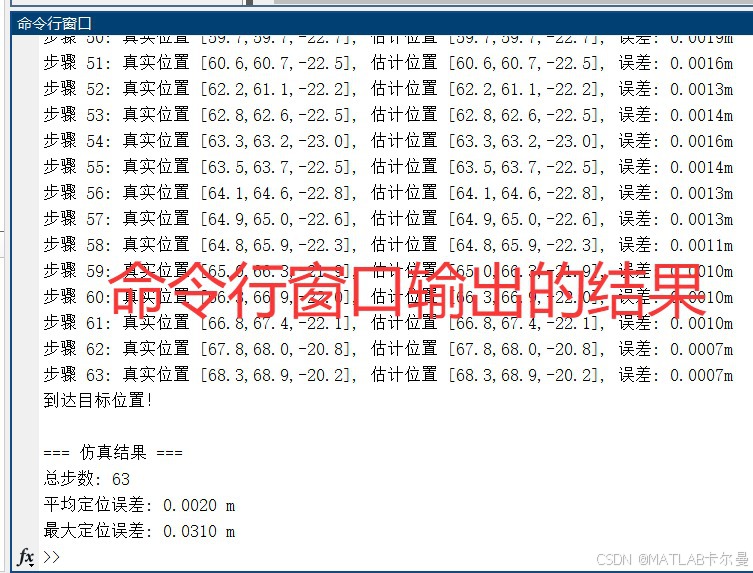
命令行输出的定位结果:
MATLAB源代码
以下代码,粘贴到MATLAB空脚本中即可直接运行:
%% AUV水声TDOA导航系统
% 基于到达时间差(TDOA)的AUV导航仿真,三维空间、 四个锚点的水下背景,两部迭代求TDOA
% author:
% 2025-08-03/Ver1
clear;</
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 468
468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











