





本代码实现了一种高精度二维目标定位算法,基于到达时间差(TDOA)测量,结合两步加权最小二乘法(Two-Step WLS),利用4个固定锚点(基站)的观测数据,估计移动目标的坐标。算法通过粗迭代和细迭代优化,显著降低测量噪声对定位精度的影响,适用于室内定位、无线传感器网络等场景。
代码介绍
算法原理
-
TDOA建模:
- 距离差计算:通过信号到达各基站的时间差(TDOA)计算距离差,公式为 R i = c ⋅ Δ t i R_i = c \cdot \Delta t_i Ri=c⋅Δti,其中 c c c为光速, Δ t i \Delta t_i Δti为时间差。
- 噪声模拟:添加高斯噪声(标准差由
std_var1控制)模拟实际测量误差。
-
两步加权最小二乘:
- 粗迭代:构造线性方程组 G a ⋅ u = h Ga \cdot u = h Ga⋅u=h,通过初始猜测(锚点位置均值)求解初步位置估计 u ∗ u^* u∗。
- 细迭代:引入加权矩阵 W W W修正误差,优化方程为 A ⋅ δ u ∗ = h 2 A \cdot \delta u^* = h_2 A⋅δu∗=h2,最终得到高精度估计 u est u_{\text{est}} uest。
代码结构解析
-
初始化:
stations_position = 50 + 100*randn(4,2); % 生成4个随机锚点坐标(均值为50,标准差100) position = 0*ones(1,2) + 5*randn(1,2); % 生成待测点坐标(均值为原点,标准差5)- 基站与目标位置均通过随机生成,模拟实际部署场景。
-
TDOA观测建模:
delta_t = r_ideal/c + std_var1*randn(size(r_ideal)); % 添加时间测量噪声 r = delta_t*c; % 转换为距离观测值 R = Ri - R1; % 计算基站间距离差 -
迭代优化:
- 粗迭代:快速收敛至粗略解,避免局部最优。
- 细迭代:通过加权矩阵 W = ( B Q B T ) − 1 W = (BQB^T)^{-1} W=(BQBT)−1抑制噪声,提升精度。
-
可视化与输出:
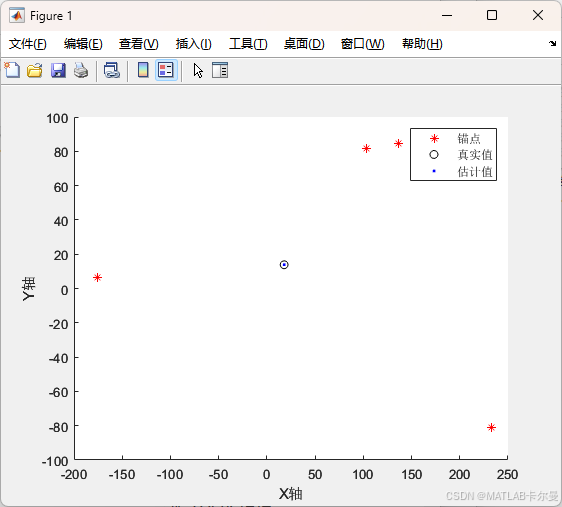
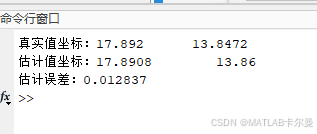
- 绘制锚点(红色*)、真实位置(黑色○)、估计位置(蓝色点)。
- 输出坐标误差及欧氏距离误差。
应用场景
- 室内定位系统:商场、仓库中的资产追踪。
- 紧急救援:通过无人机基站快速定位被困人员。
- 工业物联网:工厂内设备或机器人的实时位置监控。
扩展与改进建议
- 三维扩展:修改坐标维度,引入高度信息(参考:【MATLAB定位例程】TDOA(到达时间差)的chan-tylor,三维环境,附完整代码)
- 动态目标追踪:结合卡尔曼滤波(EKF/UKF)处理移动目标(参考【MATLAB例程】基于TDOA定位(两步最小二乘)的三维轨迹定位和UKF滤波,TDOA的锚点可以自适应,附完整代码和代码详解)。
- 多锚点支持:扩展代码支持更多基站(需调整矩阵维度及方程组构造逻辑)。参考:【MATLAB代码】二维平面上的TDOA,使用加权最小二乘法,不限制锚点数量,代码可复制粘贴
运行结果
MATLAB代码
部分代码示例:
% 两步加权最小二乘,定位二维目标、4个锚点
% 2024-11-07/Ver1
%% 初始化
clc;clear;close all;
rng(0);
% 定义参数和待测点位置
std_var1 = 1e-11; %TDOA误差
% 固定基站位置
stations_position = 50+100*randn(4,2);
c = 3e8;
% 生成待测点坐标
position = 0*ones(1,2)+5*randn(1,2);
% TDOA 建模
delta = ones(4,1)*position - stations_position; %未知点与各基站之间的相对位置(矢量)
r_ideal = (sum(delta.^2,2)).^(1/2); %计算移动台到各个基站的实际距离(标量)
delta_t = r_ideal/c+std_var1*randn(size(r_ideal));
r = delta_t*c;
完整代码下载链接:https://download.youkuaiyun.com/download/callmeup/90631434
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 382
382

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











