





用于二维平面中对目标运动状态的自适应估计。它融合了 交互多模型(IMM)滤波框架、Sage-Husa自适应噪声估计方法 以及 扩展卡尔曼滤波(EKF),使用CV和CT两种运动模型。
程序详解
本程序实现二维目标跟踪的自适应交互多模型滤波(AIMM)算法,结合经典的状态估计技术与自适应噪声处理机制,适用于运动状态复杂、观测条件不稳定的环境。
-
两种运动模型:
- 匀速运动模型(CV):适用于直线匀速场景。
- 匀角速度转弯模型(CT):适用于圆弧或曲线路径场景。
-
观测信息:系统仅使用位置观测(不含速度测量),模拟实际传感器输出。
交互式多模型滤波框架:
AIMM结构融合了多个滤波器结果,通过模型概率加权机制进行状态估计。系统能够根据信息残差自动调整模型的优先级,使滤波结果在不同运动阶段间自适应切换。
噪声自适应机制(Sage-Husa):
考虑到实际测量过程中噪声水平常常不稳定,算法引入了自适应观测噪声估计机制,可随观测误差动态调整测量协方差矩阵,提高估计准确性与稳健性。
误差评估与性能输出
📊系统提供多种后处理工具,用于评估滤波性能:
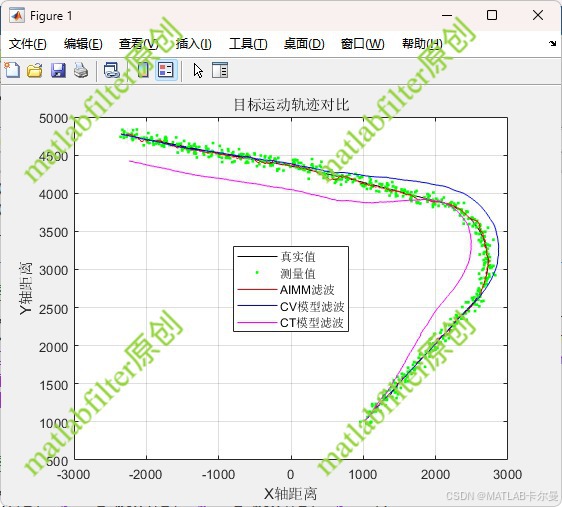
- 滤波轨迹与真实轨迹对比图;
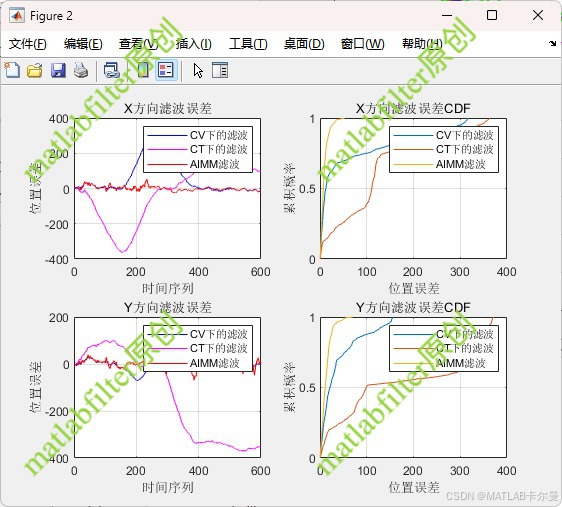
- 每种滤波器的估计误差趋势分析;
- 误差累积分布图(CDF);
- 各模型的均方根误差(RMSE)对比;
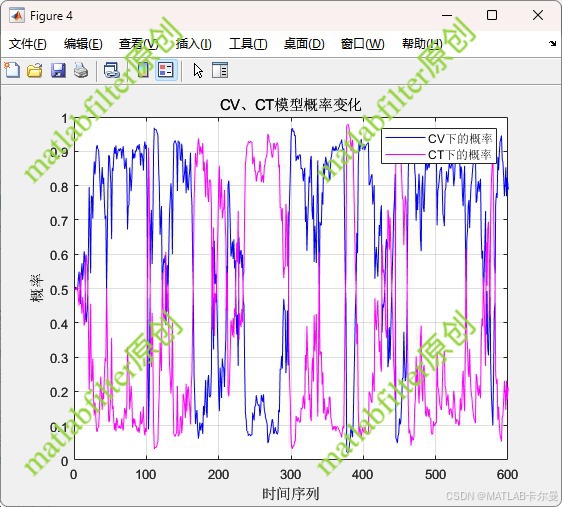
- 模型概率随时间变化图(反映模型切换情况);
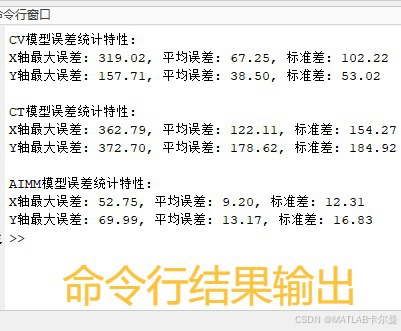
- 最大误差、平均误差、标准差等统计结果。
运行结果
轨迹真值与各方法估计值对比:
误差与误差CDF图像:
IMM概率曲线:
命令行输出结果:
MATLAB源代码
部分代码如下:
% 自适应IMM算法(CV/CT模型),二维平面
% 包含观测噪声自适应,使用Sage-Husa EKF作为滤波主体,带误差统计特性输出
% 2025-07-24/Ver1
%% 建模
clear;clc;close all; %初始化
rng(0); %固定随机种子,让每次运行得到的结果相同
N = 600; %定义仿真时间为600
T = 1; %定义采样间隔为1s
% 修改状态向量定义:[x, vx, y, vy] - 4维状态
x0 = [1000,10,1000,10]'; %状态初始化,四项分别为x轴位置、速度、y轴位置、速度
xA = []; %预定义输出的状态
% CV匀速运动模型
A1 = [1,T,0,0;
0,1,0,0;
0,0,1,T;
0,0,0,1]; %CV状态转移矩阵
G1 = [T^2/2,0;
T,0;
0,T^2/2;
0,T]; %CV噪声输入矩阵
Q1=0.001*diag([1,1]); %CV状态转移协方差矩阵
% CT匀角速度转弯模型
omega = pi/180; % 角速度,单位rad/s(1度/秒)
sin_wT = sin(omega*T);
cos_wT = cos(omega*T);
A2 = [1, sin_wT/omega, 0, -(1-cos_wT)/omega;
0, cos_wT, 0, -sin_wT;
0, (1-cos_wT)/omega, 1, sin_wT/omega;
0, sin_wT, 0, cos_wT]; %CT状态转移矩阵
G2 = [T^2/2,0;
T,0;
0,T^2/2;
0,T]; %CT噪声输入矩阵
Q2=0.001*diag([1,1]); %CT状态转移协方差矩阵
% SAGE Husa自适应参数
alpha_1 = 0.95; % 衰减因子,越接近1表示对历史信息依赖越强
alpha_2 = 0.95; % 衰减因子
beta_1 = 0.9; % 过程噪声自适应衰减因子
beta_2 = 0.9; % 过程噪声自适应衰减因子
%% 产生真实数据
x = x0; %在迭代产生真值前,给x赋初值
% 第一段:匀速直线运动
for k = 1:150
x = A1*x + G1*sqrt(Q1)*randn(size(Q1,1),1); %状态一步转移,后面的是误差
xA = [xA x]; % 将迭代得到的x加在xA后面一列
end
% 第二段:匀角速度转弯运动
for k = 1:120
x = A2*x + G2*sqrt(Q2)*randn(size(Q2,1),1); %状态一步转移,后面的是误差
xA = [xA x]; % 将迭代得到的x加在xA后面一列
end
% 第三段:匀速直线运动
for k = 1:N-270
x = A1*x + G1*sqrt(Q1)*randn(size(Q1,1),1); %状态一步转移,后面的是误差
xA = [xA x]; % 将迭代得到的x加在xA后面一列
end
%% AIMM(自适应IMM)
% 更多内容和注释,详见完整代码
% MM滤波初始化参数%%%%%%% %%%%
%% 结果后处理
如需完整的代码,请参考专栏文章:
或单独的下载链接:
https://download.youkuaiyun.com/download/callmeup/91471343
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











