




完整的MATLAB互补滤波器(Complementary Filter)实现,用于融合陀螺仪和加速度计数据来估计姿态角。该代码通过仿真演示了互补滤波器的工作原理,并提供了多种参数设置下的性能对比分析。
程序介绍
概述
这是一个完整的MATLAB互补滤波器(Complementary Filter)实现,用于融合陀螺仪和加速度计数据来估计姿态角。该代码通过仿真演示了互补滤波器的工作原理,并提供了多种参数设置下的性能对比分析。
核心原理
互补滤波器基本思想
互补滤波器是一种简单而有效的传感器融合方法,其核心思想是:
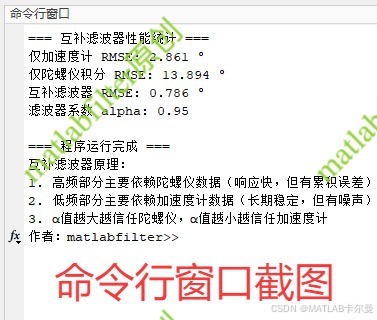
- 陀螺仪:响应快速,适合捕捉高频运动,但存在累积误差(漂移)
- 加速度计:长期稳定,适合低频参考,但易受噪声干扰
互补滤波器的数学表达式为:
θ
(
k
)
=
α
×
[
θ
(
k
−
1
)
+
ω
g
y
r
o
×
d
t
]
+
(
1
−
α
)
×
θ
a
c
c
(
k
)
θ(k) = α × [θ(k-1) + ωgyro × dt] + (1-α) × θacc(k)
θ(k)=α×[θ(k−1)+ωgyro×dt]+(1−α)×θacc(k)
其中:
θ(k):当前时刻的姿态角估计α:互补滤波器系数(0 < α < 1)ωgyro:陀螺仪角速度θacc:加速度计测得的姿态角
代码结构与功能
- 参数设置
fs = 100; % 采样频率 100Hz
dt = 1/fs; % 采样时间间隔
t_total = 10; % 总仿真时间 10秒
alpha = 0.95; % 互补滤波器系数
- 真实姿态角生成
生成一个正弦变化的俯仰角作为真实参考:
pitch_true = 30 * sin(0.5*t) * pi/180; % 幅值30°,频率0.5Hz
- 传感器数据仿真
- 陀螺仪数据:在真实角速度基础上添加偏置和白噪声
- 加速度计数据:在真实角度基础上添加测量噪声
- 互补滤波器实现
核心算法循环
逐步融合陀螺仪和加速度计数据 - 结果分析与可视化
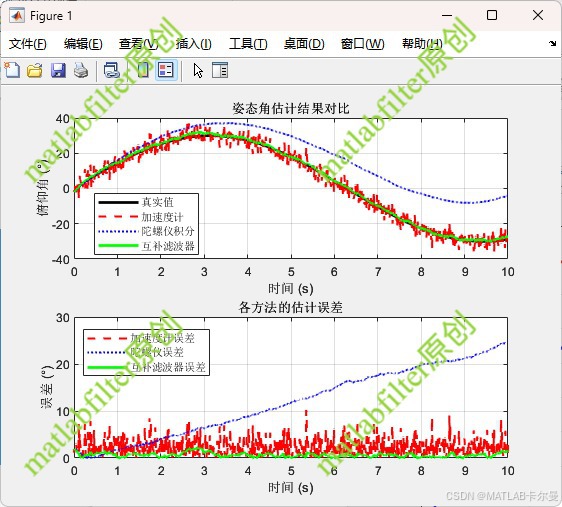
- 姿态角估计结果对比图
- 各方法的估计误差对比
- RMSE性能统计
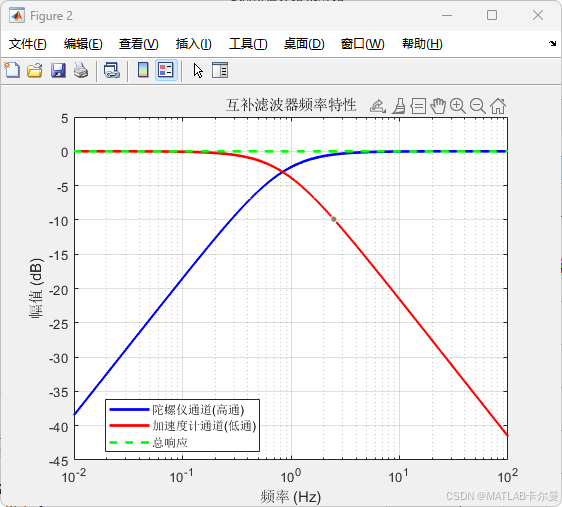
- 频率特性分析
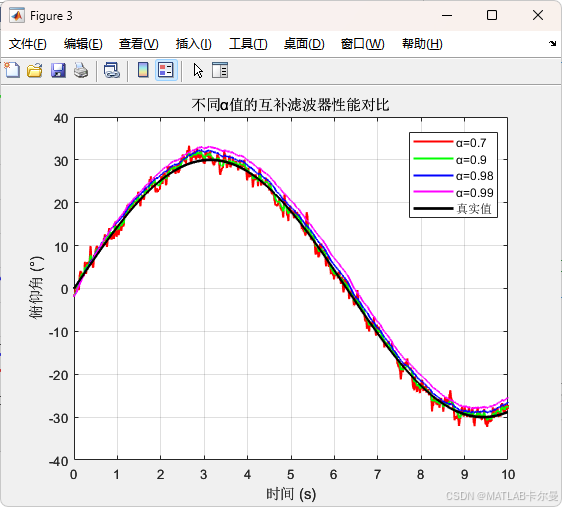
- 不同α值的性能对比
主要特点
完整的仿真环境:
- 真实姿态角生成
- 传感器噪声建模
- 性能评估指标
多维度分析:
- 时域分析:姿态角估计结果和误差对比
- 频域分析:高通/低通滤波器特性
- 参数分析:不同α值的影响
关键参数说明
α值的影响
- α = 0.95(推荐值):平衡陀螺仪和加速度计的贡献
- α → 1:更信任陀螺仪,响应快但易漂移
- α → 0:更信任加速度计,稳定但响应慢
噪声参数
gyro_noise_std = 0.1:陀螺仪噪声标准差gyro_bias = 0.05:陀螺仪偏置acc_noise_std = 0.05:加速度计噪声标准差
性能评估
代码提供了完整的性能评估体系:
- RMSE:均方根误差统计
- 误差曲线:时域误差变化
- 频率响应:滤波器特性分析
扩展建议
- 多轴扩展:扩展到三轴姿态估计(俯仰、横滚、偏航)
- 自适应α:根据运动状态动态调整α值
- 卡尔曼滤波对比:与EKF等高级滤波器对比
- 实时实现:移植到嵌入式系统
运行结果
滤波前后的角度信息曲线、误差曲线:
频率特性曲线:
命令行窗口输出的结果:
不同
α
\alpha
α时的滤波效果对比:
MATLAB源代码
部分代码如下:
%% 互补滤波器例程 - 姿态估计
% 该例程为使用互补滤波器融合陀螺仪和加速度计数据来估计姿态角,带不同alpha的结果对比
% 作者:matlabfilter
% 2025-07-15/Ver1
clc;clear;close all;
rng(0);
%% 参数设置
fs = 100; % 采样频率 (Hz)
dt = 1/fs; % 采样时间间隔 (s)
t_total = 10; % 总仿真时间 (s)
t = 0:dt:t_total; % 时间向量
N = length(t); % 采样点数
% 互补滤波器参数
alpha = 0.95; % 互补滤波器系数 (0 < alpha < 1)
% alpha越大,越信任陀螺仪;alpha越小,越信任加速度计
%% 真实姿态角生成(用于验证)
% 生成一个正弦变化的俯仰角作为真实值
pitch_true = 30 * sin(0.5*t) * pi/180; % 真实俯仰角 (弧度)
%% 传感器数据仿真
% 陀螺仪数据(角速度)
gyro_noise_std = 0.1; % 陀螺仪噪声标准差
gyro_bias = 0.05; % 陀螺仪偏置
gyro_pitch_rate = diff(pitch_true)/dt; % 真实角速度
gyro_pitch_rate = [gyro_pitch_rate(1) gyro_pitch_rate]; % 补齐长度
gyro_pitch_rate = gyro_pitch_rate + gyro_bias + gyro_noise_std * randn(1, N); % 添加偏置和噪声
% 加速度计数据(通过重力向量计算得到的角度)
acc_noise_std = 0.05; % 加速度计噪声标准差
acc_pitch = pitch_true + acc_noise_std * randn(1, N); % 添加噪声的加速度计角度
%% 互补滤波器实现
pitch_complementary = zeros(1, N); % 互补滤波器输出
pitch_gyro_only = zeros(1, N); % 仅陀螺仪积分结果
pitch_acc_only = acc_pitch; % 仅加速度计结果
完整代码下载链接:https://download.youkuaiyun.com/download/callmeup/91383422
或参考我的专栏文章:https://blog.youkuaiyun.com/callmeup/article/details/149388872?spm=1011.2415.3001.5331
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 728
728

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











