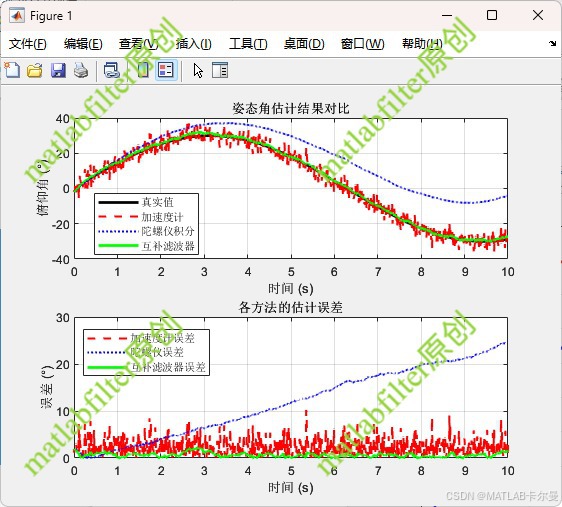
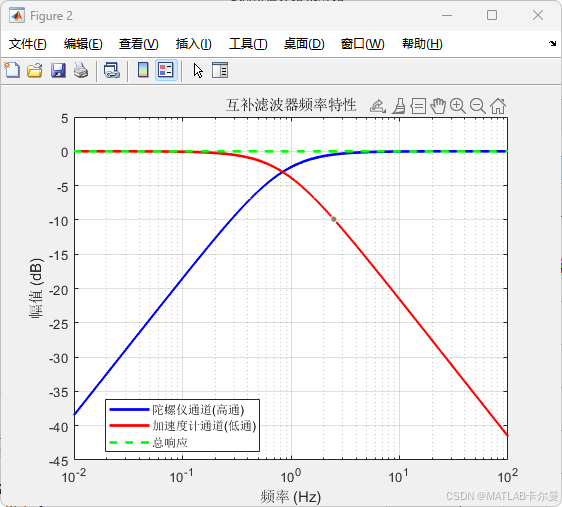
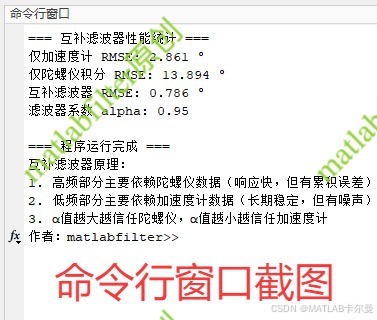
完整的MATLAB互补滤波器(Complementary Filter)实现,用于融合陀螺仪和加速度计数据来估计姿态角。该代码通过仿真演示了互补滤波器的工作原理,并提供了多种参数设置下的性能对比分析。 订阅专栏后,可以查看完整的MATLAB代码,粘贴到空脚本后即可运行 文章目录 运行结果 MATLAB源代码 程序介绍 概述 核心原理 互补滤波器基本思想 代码结构与功能 1. 参数设置 2. 真实姿态角生成 3. 传感器数据仿真 4. 互补滤波器实现 5. 结果分析与可视化 主要特点 关键参数说明 α值的影响 噪声参数 性能评估 扩展建议 运行结果 滤波前后的角度信息曲线、误差曲线: 频率特性曲线: 命令行窗口输出的结果: 不同 α \alpha α时的滤波效果对比:
 1081
1081

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










 订阅专栏 解锁全文
订阅专栏 解锁全文

























