




本文所介绍的代码通过TDOA(到达时间差)方法,结合牛顿迭代算法,实现了三维空间内目标位置的定位。系统包含1个主锚点和3个副锚点,通过测量信号到达各基站的时间差计算距离差,最终迭代求解目标坐标。
代码讲解
以下是对该MATLAB代码的简要介绍:
核心步骤
-
参数初始化
- 设置光速、4个基站的坐标(第1个为主锚点)、目标真实位置及噪声参数。
-
生成仿真数据
- 计算理论距离并添加高斯噪声,模拟实际TDOA测量值。
-
牛顿迭代定位
- 初始猜测位置为
[500, 500, 500],通过迭代更新估计值。 - 残差计算:比较估计距离差与实际测量值的误差。
- 雅可比矩阵:基于估计点与各基站的方向向量构建,用于指导迭代方向。
- 正则化处理:防止矩阵奇异,确保数值稳定性。
- 收敛条件为位置增量小于阈值(
1e-10)或达到最大迭代次数(100次)。
- 初始猜测位置为
-
结果输出与可视化
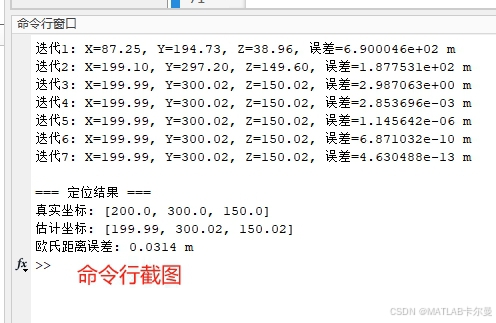
- 输出真实坐标、估计坐标及定位误差。
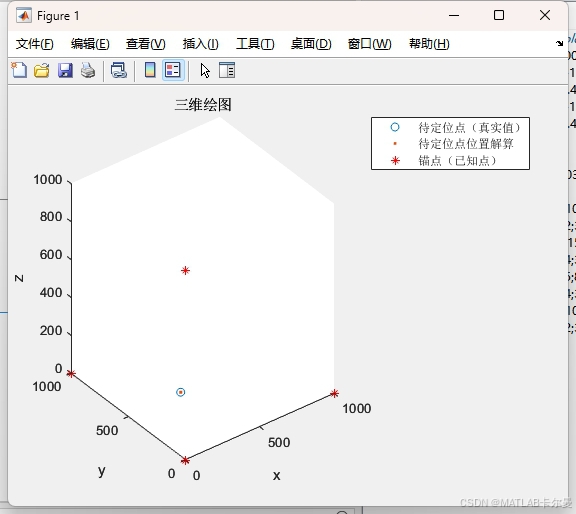
- 绘制三维图展示基站、真实目标和估计位置的空间关系。
关键特性
- 抗噪能力:通过添加噪声模拟实际测量误差,正则化处理提升算法鲁棒性。
- 可视化:三维图形直观展示定位效果,便于验证算法性能。
- 扩展性:初始猜测可替换为Chan算法结果以加速收敛,适应不同场景。
应用场景
适用于无线传感器网络、室内定位、无人机导航等需通过多基站时间差实现三维定位的领域。代码结构清晰,适合作为算法学习或简单定位系统的参考实现。
运行结果
定位示意图(定位结果展示):
命令行结果截图:
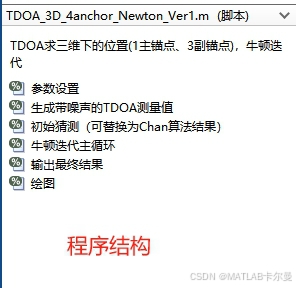
程序结构:
MATLAB源代码
部分代码:
% TDOA求三维下的位置(1主锚点、3副锚点),牛顿迭代
% 2025-04-19/Ver1
clear;clc;close all;
%% 参数设置
c = 3e8; % 信号传播速度(光速)
baseP = [0,0,0; % 基站坐标(4个基站)
1000,0,0;
0,1000,0;
0,0,1000];
point1 = [200,300,150]; % 真实目标位置
noise_std = 1e-10; % 时间测量噪声标准差
%% 生成带噪声的TDOA测量值
R_ideal = sqrt(sum((baseP - point1).^2, 2)); % 理论距离
R_meas = R_ideal(2:4) - R_ideal(1) + c*noise_std*randn(3,1); % 距离差测量值
完整代码下载链接:https://download.youkuaiyun.com/download/callmeup/90646895
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 389
389

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











