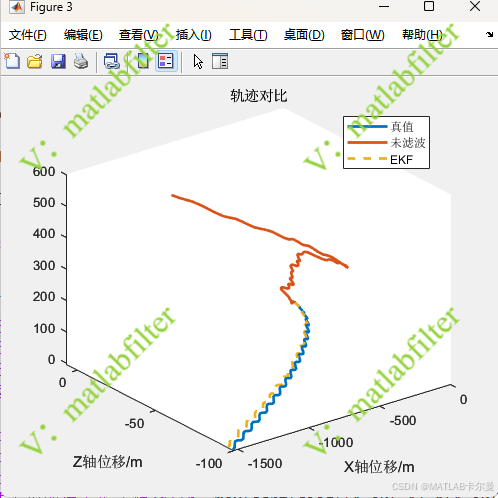
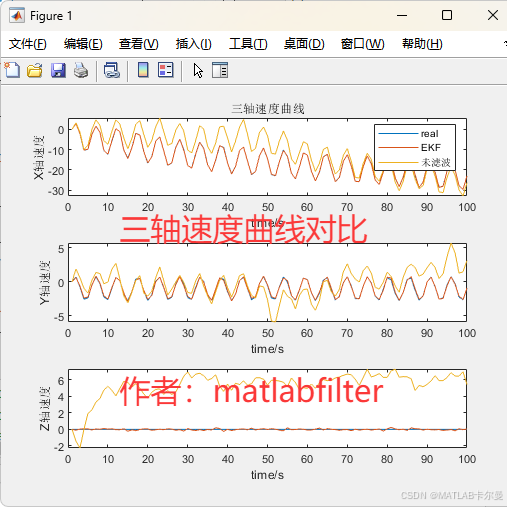
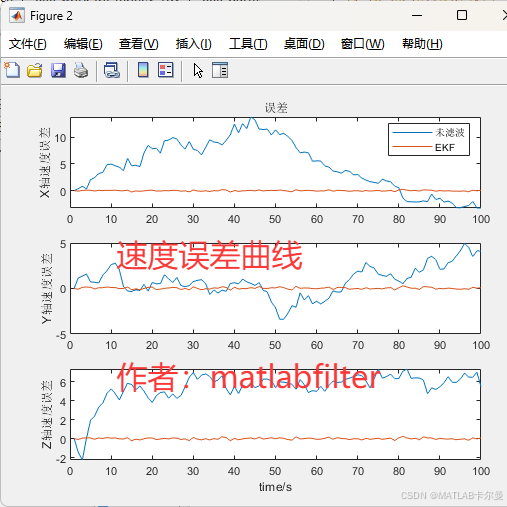
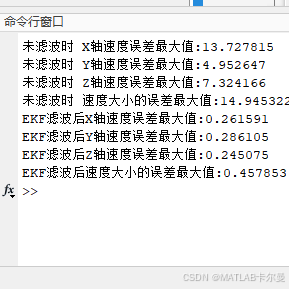
【MATLAB代码】三维环境下,EKF融合INS与DVL的核心程序,用于惯导和速度传感器的数据融合滤波。订阅专栏后可直接查看完整代码
最新推荐文章于 2026-01-06 18:13:03 发布





 2025博客之星年度评选已开启
10w+人浏览
3.4k人参与
2025博客之星年度评选已开启
10w+人浏览
3.4k人参与

2025博客之星年度评选已开启
10w+人浏览
3.4k人参与
 1016
1016

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






 订阅专栏 解锁全文
订阅专栏 解锁全文

























