




市面上很多商家用一些小玩意来赚黑心钱,简单的例子却卖了很高的价格,甚至几十块的程序无法跑通、兼容性问题无法解决等。这里将一些小例子分享给大家。
如果觉得不错,欢迎订阅我的其他付费专栏:
- MATLAB定位与滤波例程:https://blog.youkuaiyun.com/callmeup/category_12916974.html
- MATLAB定位程序与详解:https://blog.youkuaiyun.com/callmeup/category_12794805.html
- IMM交互式多模型滤波MATLAB实践:https://blog.youkuaiyun.com/callmeup/category_12816762.html
程序介绍
整体结构
代码分为6个主要模块:
- 参数设置:定义车辆参数(轴距、尺寸)和车位参数
- 路径规划:采用三阶段控制策略生成控制量(转向角/速度)
- 运动学仿真:基于自行车模型进行位姿迭代计算
- 可视化:绘制轨迹/转向/速度/航向四维图表
- 动画演示:动态展示泊车过程
- 辅助函数:
getCarCorners计算车辆轮廓
核心算法
-
运动学模型:采用改进的自行车模型
beta = atan((L/2)/wheelbase * tan(delta(k))); % 等效侧偏角 dx = velocity(k) * cos(theta + beta); % x方向速度 dy = velocity(k) * sin(theta + beta); % y方向速度 dtheta = (velocity(k)/wheelbase) * sin(beta); % 角速度该模型考虑了转向几何关系,比标准自行车模型更精确
-
路径规划策略:
- 阶段1:前进+右转(驶入起始位置)
- 阶段2:倒车+左转(主要入库动作)
- 阶段3:前进微调(姿态校正)
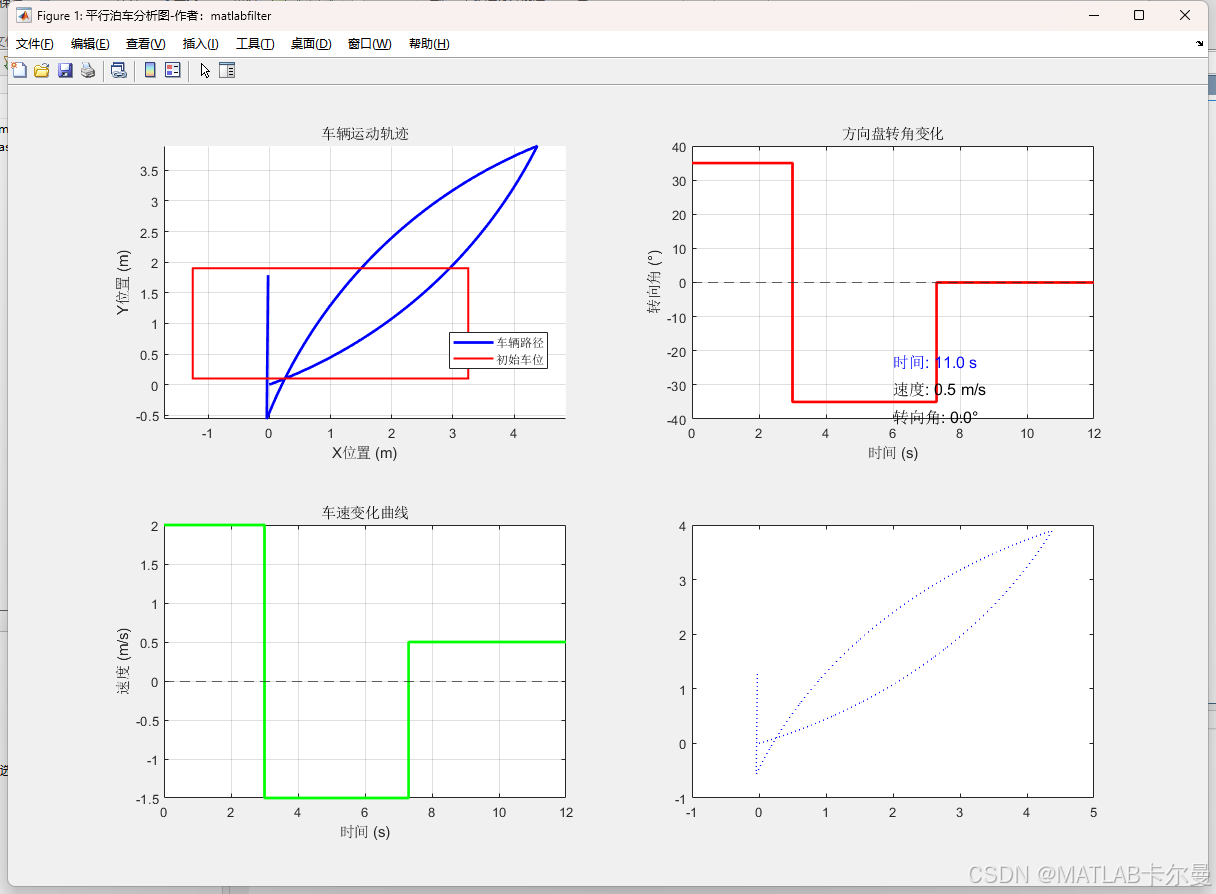
可视化特色
- 多维度分析:通过4个子图同步显示轨迹、转向、速度、航向信息
- 动态标注:动画中实时显示时间、速度、转向角信息
- 坐标锁定:
axis equal保证比例尺一致,准确反映车辆运动
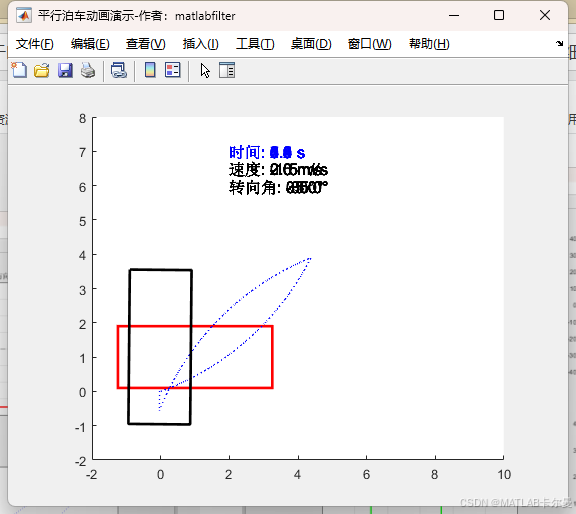
动画实现
- 逐帧刷新:通过循环更新车辆位置,删除旧图形实现动画效果
- 轨迹追溯:虚线显示历史轨迹
- 性能优化:
drawnow+pause(0.05)平衡流畅度与计算负荷
扩展性
- 参数可调:修改车辆/车位参数可直接适配不同场景
- 控制量扩展:可通过增加阶段数实现更复杂路径
- 模型升级:在运动学计算部分可替换为更复杂的动力学模型
运行结果
MATLAB代码
%% 平行泊车仿真示例
% 作者:matlabfilter(V同号)
% 功能:基于运动学模型的平行泊车路径规划与运动控制仿真
% 版本:2025-04-09/Ver1
% 实现功能:
% 1. 三阶段路径规划(前进调整、倒车入库、最后调整)
% 2. 车辆运动学模型仿真
% 3. 多维度可视化(轨迹/转向角/速度/航向角)
% 4. 动态泊车过程动画演示
clear; close all; clc;
rng(0); % 固定随机种子保证可重复性
%% ======================== 参数设置 ========================
% 车辆参数
wheelbase = 2.8; % 轴距(米)[前后轮中心距离]
max_steer = 35*pi/180; % 最大转向角(弧度)
L = 3; % 转向特性参数(与转向几何相关)
car_width = 1.8; % 车辆宽度(米)
car_length = 4.5; % 车辆长度(米)
% 车位参数
parking_length = 6.5; % 车位长度(米)
parking_width = 2.2; % 车位宽度(米)
%% ===================== 初始/目标位置 =====================
start_pose = [0, 0, 0]; % 初始姿态 [x(m), y(m), theta(rad)]
end_pose = [1, 1 ,10]; % 目标姿态(示例值,实际需根据车位调整)
%% ====================== 路径规划 =========================
% 采用三阶段控制策略:
% 阶段1:前进并右转(驶入起始位置)
t1 = linspace(0, 3, 50); % 时间序列
delta1 = max_steer*ones(size(t1)); % 转向角控制
v1 = 2*ones(size(t1)); % 速度控制(正数为前进)
% 阶段2:倒车左转(主要入库动作)
t2 = linspace(3, 7.3 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2785
2785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











