




本文给出一个基于卡尔曼滤波器的双雷达四目标分布式融合跟踪的MATLAB代码框架,结合了TDOA/FDOA观测模型和分布式融合逻辑。代码参考了多目标跟踪、分布式MIMO雷达优化及卡尔曼滤波实现方法。
代码说明
以下是代码的主要功能和结构介绍:
代码背景
-
功能:
模拟一个包含双雷达的多目标跟踪系统,使用 卡尔曼滤波器 实现目标的独立跟踪,并通过 分布式融合 提高跟踪精度。 -
目标数量:默认为 5 个目标。
-
雷达数量:默认为 2 部雷达,分别位于坐标系的不同位置。
-
特色:
- 随机初始化目标状态:每个目标的初始位置和速度随机生成。
- 噪声建模:测距噪声(高斯分布)和测角噪声被单独建模,用于模拟实际雷达观测数据的误差。
- 分布式融合:结合多个雷达的观测结果,通过加权平均融合目标状态,提升跟踪精度。
代码结构
代码按照模块化设计,分为以下部分:
仿真参数初始化
- 采样周期和次数:定义采样频率(
T)和总时长(N)。 - 目标和雷达设置:
- 随机生成目标的初始状态(包括位置和速度)。
- 雷达位置固定为
[0, 0]和[500, 0],分别位于坐标系的两侧。
- 模型参数:
- 状态转移矩阵(
F)和过程噪声(Q)。 - 观测噪声协方差(
R_radar)。
- 状态转移矩阵(
滤波主循环
- 按照时间步长迭代,完成目标轨迹生成、雷达观测模拟、卡尔曼滤波更新以及分布式融合:
- 真实轨迹生成:利用状态转移方程生成目标真实轨迹,并加入过程噪声。
- 雷达观测模拟:根据目标的真实位置,计算距离和方位角,并加入测量噪声。
- 卡尔曼滤波:
- 预测步骤:利用状态转移矩阵预测目标的下一步状态和协方差。
- 更新步骤:利用雷达观测和观测模型(雅可比矩阵)修正目标状态。
- 分布式融合:通过加权平均方法,将两部雷达的独立估计结果融合为最终目标状态。
可视化
- 轨迹对比:
- 绘制每个目标的 真实轨迹 和 融合估计轨迹,并区分不同颜色。
- 用三角形标记雷达位置。
详见后面的“运行结果”
核心辅助函数
compute_jacobian:
计算观测模型的雅可比矩阵,用于卡尔曼滤波更新步骤。h_meas:
定义雷达的非线性观测模型,输出目标的距离和方位角。
核心逻辑说明
卡尔曼滤波器的应用
卡尔曼滤波器分为两个步骤:
- 预测步骤:
根据目标的运动模型(状态转移矩阵F)和过程噪声Q,预测下一时刻的状态和协方差。 - 更新步骤:
结合雷达观测数据,通过观测模型和雅可比矩阵修正预测值,得到更精确的估计。
分布式融合
- 融合方式:
两部雷达的独立估计结果按权重加权平均,得到目标状态的最终估计值。 - 适用场景:
适用于多传感器系统,尤其是传感器观测覆盖区域重叠的情况下。
代码运行结果
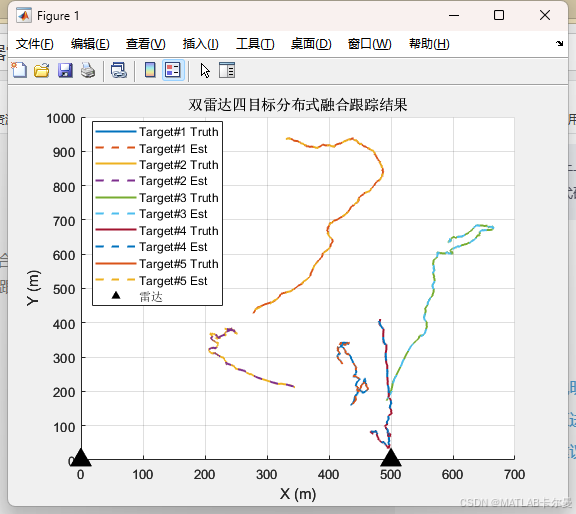
运行代码后,生成的图像展示了:
- 真实轨迹(实线):目标的实际运动路径。
- 融合轨迹(虚线):融合估计的目标运动路径。
- 雷达位置(三角形):双雷达在坐标系中的固定位置。
通过对比可以观察到:
- 卡尔曼滤波器对目标轨迹的估计精度较高,特别是在分布式融合后,轨迹更加平滑且贴近真实值。
改进建议
- 扩展传感器数量:支持更多雷达传感器,并比较融合算法在多传感器条件下的性能。
- 目标运动模型改进:引入更复杂的运动模型(如匀加速模型或转弯模型)。
- 融合算法优化:尝试基于卡尔曼加权的更优融合方法(如协方差交叉约束)。
运行结果
MATLAB代码
部分代码如下:
% 基于matlab卡尔曼滤波器雷达多目标跟踪(双雷达 多目标 分布式融合)
% 作者:matlabfilter
% 2025-04-07/Ver1
clear; clc; close all;
rng(0); % 固定随机种子
%% 仿真参数初始化
T = 1; % 采样周期(s)
N = 200; % 总采样次数
num_targets = 5;% 目标数量
num_radars = 2; % 雷达数量
sigma_R = 10; % 测距噪声标准差(m)
sigma_A = 0.5; % 测角噪声标准差(deg)
%% 目标初始状态(位置和速度)
targets = struct();
for q = 1:num_targets
targets(q).x = [randi([100,500]); randi([-10,10]); randi([100,500]); randi([-10,10])]; % [x, vx, y, vy]
targets(q).P = diag([50, 5, 50, 5]); % 初始协方差
end
% 雷达位置(假设双雷达分布在坐标系两侧)
radar_pos = [0, 0; 500, 0]; % 雷达1和雷达2的位置
% 卡尔曼滤波器参数
完整的代码下载链接:
https://download.youkuaiyun.com/download/callmeup/90586465
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 560
560

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











