




本MATLAB代码实现了一个基于距离与到达角(AoA)的三维测距系统,主要用于在动态环境中估计目标物体的位置。提供本算法与仅侧角(AoA)的定位误差对比
代码运行结果
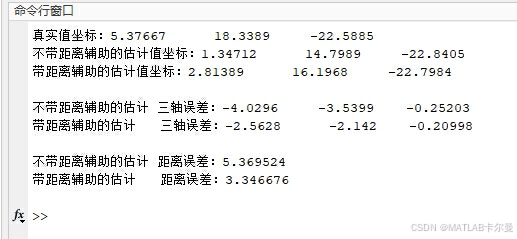
定位结果如下:

命令行的坐标和误差输出:
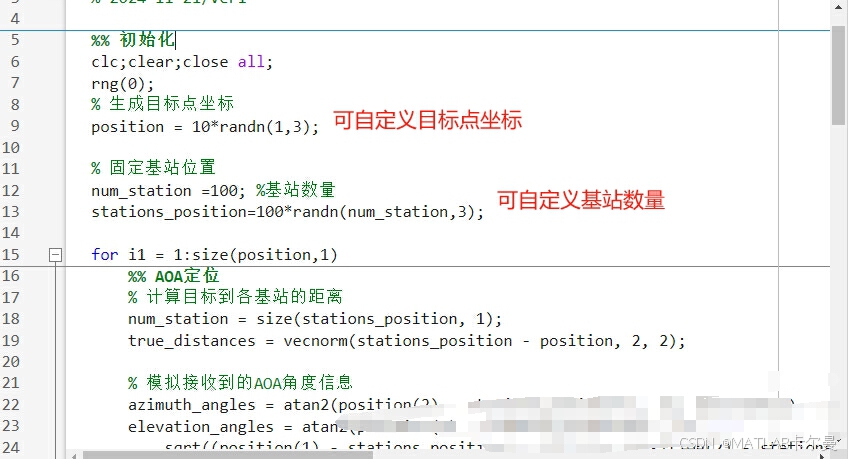
部分代码截图:
源代码
部分源代码如下:
% 距离与AOA辅助的三维测距,自适应基站数量
% 2024-11-21/Ver1
%% 初始化
clc;clear;close all;
rng(0);
% 生成目标点坐标
position = 10*randn(1,3);
% 固定基站位置
num_station =100; %基站数量
stations_position=100*randn(num_station,3);
for i1 = 1:size(position,1)
%% AOA定位
% 计算目标到各基站的距离
num_station = size(stations_position, 1);
true_distances = vecnorm(stations_position - position, 2, 2);
% 模拟接收到的AOA角度信息
azimuth_angles = atan2(position(2) - stations_position(:, 2), position(1) - stations_position(:, 1));
elevation_angles = atan2(position(3) - stations_position(:, 3), ...
sqrt((position(1) - stations_position(:, 1)).^2 + (position(2) - stations_position(:, 2)).^2));
% 假设测量的AOA角度和距离上加一些噪声
AOA_noise = 1e-1; % AOA 角度噪声
distance_noise = 1; %辅助AOA的距离噪声
azimuth_angles = azimuth_angles + AOA_noise * randn(num_station, 1);
elevation_angles = elevation_angles + AOA_noise * randn(num_station, 1);
distances = true_distances + distance_noise * randn(num_station, 1);
% 使用最小二乘法进行定位估计
% 定义目标位置的初始猜测
A = zeros(num_station , 3); % 2 行 per anchor, 4 列 (x, y, z, 1)
b = zeros(num_station , 1);
代码功能概述
- 目标:在三维空间中通过固定基站的位置和目标点的位置,结合到达角(AOA)和距离信息,进行目标位置的估计。
- 方法:使用最小二乘法来估计目标位置,并比较普通AoA方法下的估计效果。
主要步骤分析
初始化部分
clc; clear; close all;:清空命令行、变量和关闭所有图形窗口。rng(0);:设置随机数生成器的种子,以确保结果可重复。- 生成目标点坐标:在三维空间中随机生成一个目标点的位置。
- 固定基站位置:生成多个随机位置的基站。
AOA定位
-
计算真实距离:使用
vecnorm函数计算目标与各基站之间的真实距离。 -
模拟AOA角度信息:
- 计算目标相对于基站的方位角(azimuth)和俯仰角(elevation)。
- 为模拟的角度和距离添加噪声,以模拟实际测量中的不确定性。
-
构建线性方程:
- 初始化矩阵
A和向量b,用以存储线性方程组的数据。 - 对每个基站,计算单位向量,并构建线性方程。
- 初始化矩阵
-
最小二乘法求解:
- 使用最小二乘法估计目标位置,分别计算不带距离辅助和带距离辅助的AOA估计。
绘图与输出
- 通过
plot3函数绘制基站位置、真实目标位置和估计位置,以可视化估计效果。 - 输出真实位置、估计位置及其误差,便于分析定位精度。
总结
总体而言,这段代码展示了一种有效的三维定位方法,通过结合距离和AOA信息,利用噪声模型进行数据模拟,并通过最小二乘法进行位置估计。它为研究和开发更复杂的定位算法提供了基础,可以在实际应用中进行进一步优化和扩展。
如有需要,可通过下方卡片联系作者(代码咨询、定制等)


















 789
789

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











