




 本文详细探讨了惯性传感器,如陀螺仪和加速度计的噪声特性,包括幅度与带宽的关系、功率谱密度的重要性、平均时间对噪声幅度的影响。通过实例展示了求平均如何降低噪声,并解释了白噪声与随机游走之间的联系。同时,讨论了传感器误差模型,如高斯白噪声、随机游走和一阶高斯马尔可夫过程,并介绍了用于分析传感器稳定性的Allan方差方法。此外,还提到了加速度计的测量模型及其误差来源。
本文详细探讨了惯性传感器,如陀螺仪和加速度计的噪声特性,包括幅度与带宽的关系、功率谱密度的重要性、平均时间对噪声幅度的影响。通过实例展示了求平均如何降低噪声,并解释了白噪声与随机游走之间的联系。同时,讨论了传感器误差模型,如高斯白噪声、随机游走和一阶高斯马尔可夫过程,并介绍了用于分析传感器稳定性的Allan方差方法。此外,还提到了加速度计的测量模型及其误差来源。
噪声(Noise )
- 幅度(RMS)与带宽的平方根成正比

- 由上图可知,信号总能量就是幅度的平方;功率谱密度对于惯性传感器来说才是本质的参数,它变低了,说明传感器才是真正的好。
通过求平均来降低噪声的幅度:幅度(RMS)与平均时间的平方根成反比。(当我们用陀螺和加速度计进行静态测量时,被测参数是一个常值,常值在时域上,常值信号,它的带宽为0,即0HZ;这时就可以用一个最简单最狠的低通滤波,即求平均,来降低噪声的影响)
陀螺白噪声与角度随机游走的关系
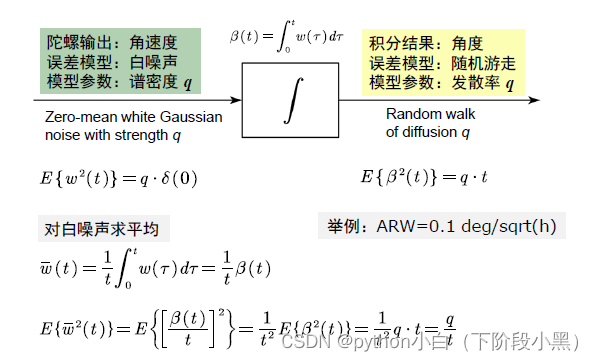
上图可以知道:
1.惯性传感器里面,以陀螺为例,陀螺输出为角速度,惯导算法里总是要做某种形式积分,积分结果就变为角度;角速度白噪声就变为角度随机游走
2.白噪声层面,参数为功率谱密度;随机游走模型参数变为发散率;他俩本质相同
3.以公式为例,白噪声平方的数学期望,等于功率谱密度乘以一个狄拉克函数(狄拉克函数积分面积为1);随机游走功率的数学期望,等于发散率乘以时间(时变的,随着时间线性发散),时间越长,功率统计值越大,也就是幅度随着时间的开方而线性增长
4.求平均是有效的抑制白噪声的方式;从0到t时刻的平均值,是随机游走的1/t;而白噪声的平均值他的功率,就是它的平方的数学期望;幅度是功率的开方,因此,幅度是和根号t成反比(下面示例可以看出)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 7081
7081

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











