




Allan方差分析方法
根据Allan标准差曲线的形状识别主要随机误差类型,计
算随机误差的模型参数

1.上图中,横轴为时间尺度,纵轴为Allan方差的开方,称作Allan标准差也可以;出于图形表现力的考虑,为双对数曲线
2.白噪声为图中的斜率为-1/2的直线;一阶高斯马尔可夫过程由Correlated Noise 和 Sinusoidal处表现。Correlated Noise为一个小山包形状的曲线,如果信号里有一个周期性的东西,那么一定会 由Sinusoidal体现出来一个峰接着一个峰的序列,就说明是周期项;平坦的部分就是闪烁噪声,即零偏不稳定性;若存在发散的误差,就像随机游走一样,那么就表现在图中+1/2斜率的曲线;假设传感器有问题,传感器随着时间有一个零偏的线性发散,那么就有一个+1斜率的直线;若存在量化噪声,则体现出来的是一个斜率为-1的直线,但是就目前的传感器而言,这一部分会很少
Allan 方差– 误差模型识别案例
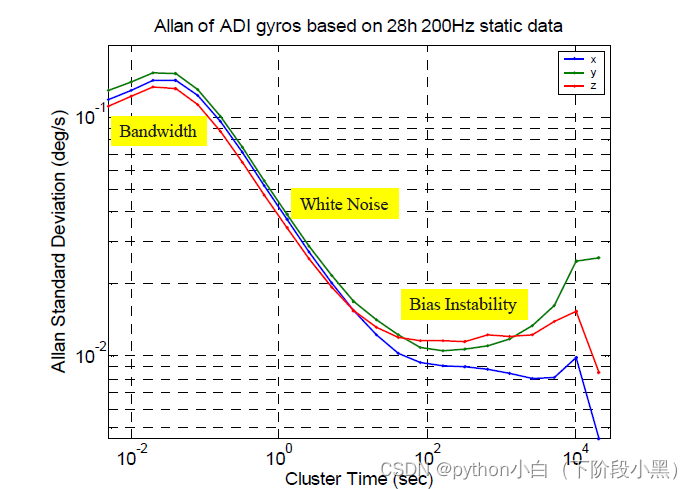
1.左边有一段曲线趋势下降(正常来说,若是有量化噪声的话,曲线应该往左边上升),越往左边越反应的是短时间高频的信息,由于测试时,输出的时候加了一个大的低通滤波,就把高频的部分衰减了,因此曲线就下降了
2.Allan方差在实际应用中只能看到主要矛盾,次要因素有可能看不到,这一点是可以的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 91
91

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











