



总结
Gazebo Harmonic gz-harmonic 和 ROS2 Jazzy 注意事项-优快云博客
Gazebo与ROS1、ROS2接口变迁-2005-2024-_gazebo 插件迁移-优快云博客
Gazebo教程大纲中文总结
目标:
使用Gazebo和ROS 2启动仿真
教程难度:
高级
所需时间:
5分钟
内容概览:
- 前提条件:
- 需要安装ROS 2和Gazebo。
- ROS 2的安装需遵循ROS 2的安装指南。
- Gazebo的安装则要根据与ROS版本相匹配的组合来进行,具体支持的组合可在此处查看。
- ROS REP-2000标准规定了每个ROS发行版默认的Gazebo版本。
- 快速检查:
- 通过运行
gz sim命令来验证Gazebo是否正确安装。
- 通过运行
- 进一步资源:
- 完成Gazebo安装并通过快速测试后,可以进一步学习Gazebo教程,尝试构建自己的机器人。
- 若使用的Gazebo版本与推荐版本不同,需确保通过下拉菜单选择正确的文档版本。
- 总结:
- 在本教程中,您已经安装了Gazebo并设置了工作空间,为开始学习Gazebo教程做好了准备。
注意:
- 本教程中的指令适用于当前的Gazebo(之前称为Ignition),而非Gazebo Classic。
通过上述总结,您可以清晰地了解本教程的目标、所需的前提条件、如何快速检查安装情况,以及进一步的学习资源。这将帮助您更顺利地开始使用Gazebo和ROS 2进行机器人仿真。
单选题
-
Gazebo Harmonic (gz-harmonic) 是基于哪个开源项目发展而来的?
A. Gazebo Classic
B. V-REP
C. Open Dynamics Engine (ODE)
D. Webots
正确答案: A (Gazebo Harmonic 是基于 Gazebo 项目的新版本,替代了之前的 Gazebo Classic。) -
在Gazebo Harmonic中,模型文件通常使用哪种格式?
A. .sdf (Simulation Description Format)
B. .urdf (Unified Robot Description Format)
C. .xml
D. .json
正确答案: A (.sdf 是 Gazebo 使用的仿真描述文件格式。) -
Gazebo Harmonic 与 ROS2 Jazzy 集成时,用于启动仿真世界的命令是?
A.ros2 launch
B.gz sim
C.ros2 run gazebo_ros_pkgs gz_ros2_bridge
D.gazebo --ros2
正确答案: B (gz sim是启动 Gazebo 仿真的基本命令,与 ROS2 集成时可能需要额外的参数或配置。) -
在Gazebo Harmonic中,哪个组件负责物理引擎的计算?
A. Gazebo Server
B. Gazebo Client
C. Gazebo GUI
D. Gazebo Plugins
正确答案: A (Gazebo Server 负责物理引擎的计算和仿真世界的维护。) -
为了在Gazebo Harmonic中模拟传感器数据,你通常会使用哪种类型的插件?
A. 世界插件
B. 模型插件
C. 传感器插件
D. 控制插件
正确答案: C (传感器插件用于模拟传感器数据,如激光扫描仪、摄像头等。)
多选题
-
Gazebo Harmonic 与 ROS2 Jazzy 集成时,以下哪些步骤是必要的?
A. 安装 Gazebo Harmonic 和 ROS2 Jazzy
B. 配置 ROS2 环境变量
C. 编写 .sdf 文件描述仿真世界
D. 使用gz_ros2_bridge连接 Gazebo 和 ROS2
正确答案: A, B, C, D (所有选项都是集成过程中可能需要的步骤。) -
在Gazebo Harmonic中,以下哪些是可以模拟的物理现象?
A. 刚体动力学
B. 流体动力学
C. 碰撞检测
D. 光学效应
正确答案: A, C (Gazebo Harmonic 主要模拟刚体动力学和碰撞检测,而流体动力学和光学效应通常不在其模拟范围内。)
判断题
-
Gazebo Harmonic 提供了内置的 GUI 用于可视化仿真世界。
正确答案: 对 (Gazebo Harmonic 确实提供了内置的图形用户界面用于可视化仿真。) -
在Gazebo Harmonic中,你可以直接通过修改 .sdf 文件来动态改变仿真中的物理参数。
正确答案: 错 (虽然 .sdf 文件用于描述仿真世界,但动态改变物理参数通常需要通过 API 或插件在运行时进行,而不是直接修改 .sdf 文件。)
希望这些问题能够帮助您评估对 Gazebo Harmonic 和 ROS2 Jazzy 的理解。
Gazebo Harmonic 详细中文教程
一、介绍
Gazebo Harmonic 是 Gazebo 仿真平台的一个版本,它提供了高质量的图形渲染和物理仿真能力,是机器人开发、测试算法、硬件仿真和快速原型设计的理想工具。与 ROS 2 Jazzy 的紧密集成,使得开发者能够在复杂的仿真环境中验证和优化机器人系统。
二、安装 Gazebo Harmonic
在 Ubuntu 上安装
-
更新系统并安装必要的工具
bash复制代码sudo apt-get updatesudo apt-get install lsb-release gnupg -
添加 Gazebo 仓库的 GPG 密钥
bash复制代码sudo curl https://packages.osrfoundation.org/gazebo.gpg --output /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg -
配置 Gazebo 的 APT 仓库
bash复制代码echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null -
更新包列表并安装 Gazebo Harmonic
bash复制代码sudo apt-get updatesudo apt-get install gz-harmonic
三、启动 Gazebo Harmonic
安装完成后,可以通过以下命令启动 Gazebo Harmonic:
bash复制代码
gz sim |
这将启动 Gazebo 的图形界面,展示默认的仿真世界。
四、配置仿真环境
1. 设置环境变量
为了确保 sdf 文件存放在正确路径,可以设置环境变量 GZ_SIM_RESOURCE_PATH:
bash复制代码
export GZ_SIM_RESOURCE_PATH=/path/to/your/sdf/files |
2. 加载世界文件
可以使用以下命令加载特定的世界文件:
bash复制代码
gz sim /path/to/your/world.sdf |
五、创建和编辑仿真模型
Gazebo Harmonic 使用 SDF(Simulation Description Format)文件来描述仿真模型。你可以使用文本编辑器或专门的模型编辑器来创建和编辑这些文件。
1. 基本 SDF 结构
一个基本的 SDF 文件通常包含以下部分:
xml复制代码
<sdf version="1.x"> | |
<world name="default"> | |
<!-- 世界设置 --> | |
</world> | |
<model name="my_model"> | |
<!-- 模型设置 --> | |
<link name="link1"> | |
<!-- 链接设置 --> | |
</link> | |
<joint name="joint1" type="revolute"> | |
<!-- 关节设置 --> | |
</joint> | |
</model> | |
</sdf> |
2. 添加传感器和插件
你可以在模型中添加传感器和插件来扩展其功能。例如,添加一个摄像头传感器:
xml复制代码
<sensor name="camera" type="camera"> | |
<!-- 摄像头设置 --> | |
</sensor> |
六、运行仿真
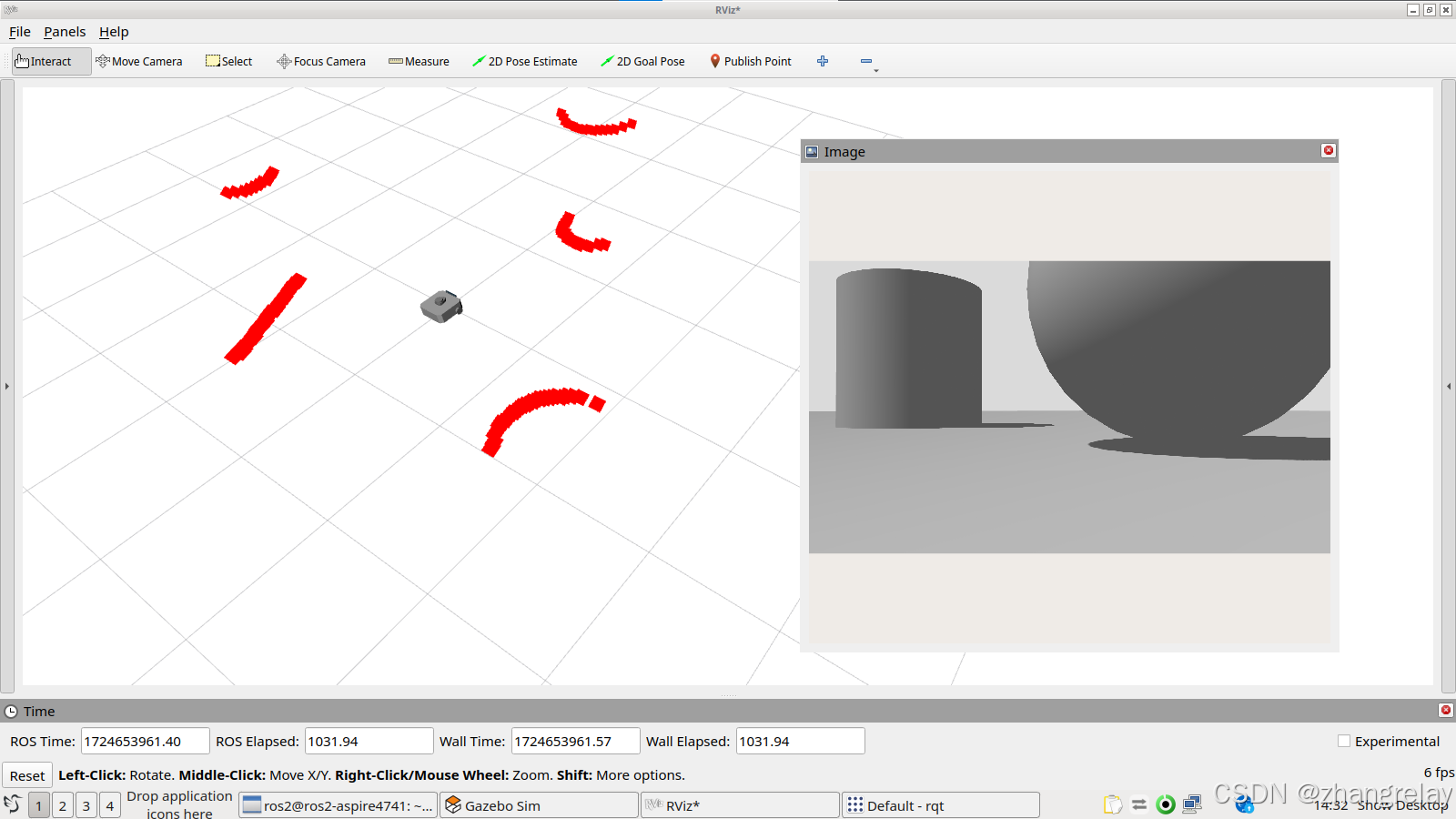
在加载世界文件和模型后,你可以启动仿真并观察机器人的行为。Gazebo Harmonic 提供了丰富的可视化工具,帮助你理解机器人的运动和交互。
七、与 ROS 2 Jazzy 集成
Gazebo Harmonic 与 ROS 2 Jazzy 的集成使得开发者能够在仿真环境中测试复杂的机器人系统。你可以使用 ROS 2 的话题、服务和操作来控制仿真中的机器人,并收集传感器数据进行分析。
1. 启动 ROS 2 节点
在启动 Gazebo 仿真之前,确保 ROS 2 节点已经运行。你可以使用 ros2 launch 命令来启动包含 Gazebo 插件的 ROS 2 包。
2. 使用 ROS 2 控制仿真
在仿真运行时,你可以通过发布 ROS 2 话题或使用 ROS 2 服务来控制机器人的行为。例如,发布一个速度指令来控制机器人的移动。
八、高级功能
Gazebo Harmonic 还提供了许多高级功能,如流体动力学仿真、光学效应模拟等。这些功能可以通过安装额外的插件和配置来实现。
九、卸载 Gazebo Harmonic
如果你需要卸载 Gazebo Harmonic 或切换到其他版本,可以使用以下命令:
bash复制代码
sudo apt-get remove gz-harmonic && sudo apt-get autoremove |
这将移除 Gazebo Harmonic 包及其所有依赖项,并清理不再需要的软件包。
总结
Gazebo Harmonic 是一个功能强大的仿真平台,它提供了高质量的图形渲染和物理仿真能力,是机器人开发和测试的理想选择。通过与 ROS 2 Jazzy 的紧密集成,开发者可以在复杂的仿真环境中验证和优化机器人系统。希望本教程能帮助你快速上手 Gazebo Harmonic 并开始你的机器人仿真之旅。


















 5132
5132

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











