



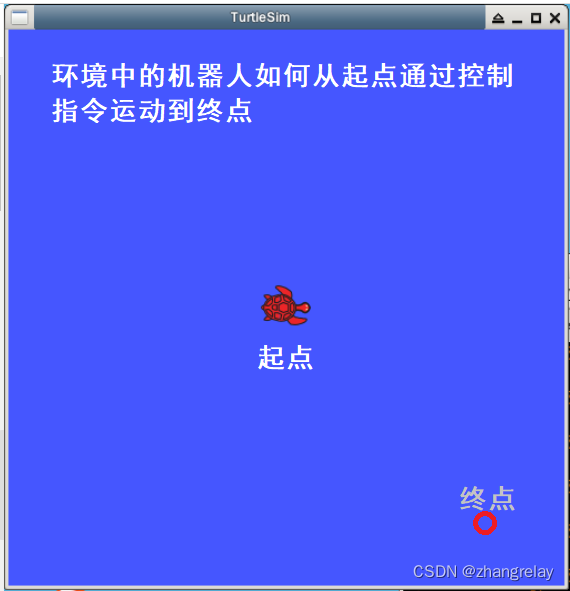
 该博客介绍了如何在ROS环境中实现机器人定位与控制。通过订阅turtle1的pose话题获取当前位置,并设定目标位置(x=10.0, y=1.5),计算速度误差以调整机器人运动。代码示例展示了如何结合位置反馈来动态调整线性和角速度,实现对机器人的精确控制。
该博客介绍了如何在ROS环境中实现机器人定位与控制。通过订阅turtle1的pose话题获取当前位置,并设定目标位置(x=10.0, y=1.5),计算速度误差以调整机器人运动。代码示例展示了如何结合位置反馈来动态调整线性和角速度,实现对机器人的精确控制。
这部分可以参考之前案例:
☞ ROS编程(ETH)2018更新版习题说明(三)_zhangrelay的博客-优快云博客
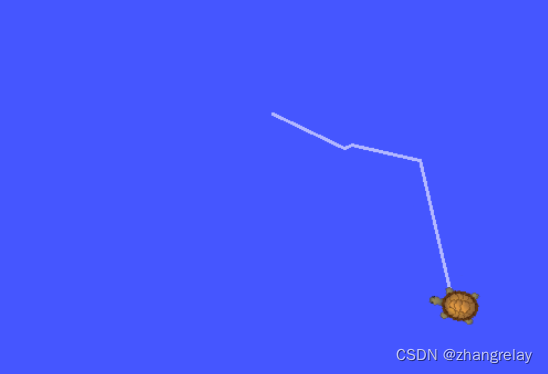
遥控肯定没难度,但是精度也很差哦。
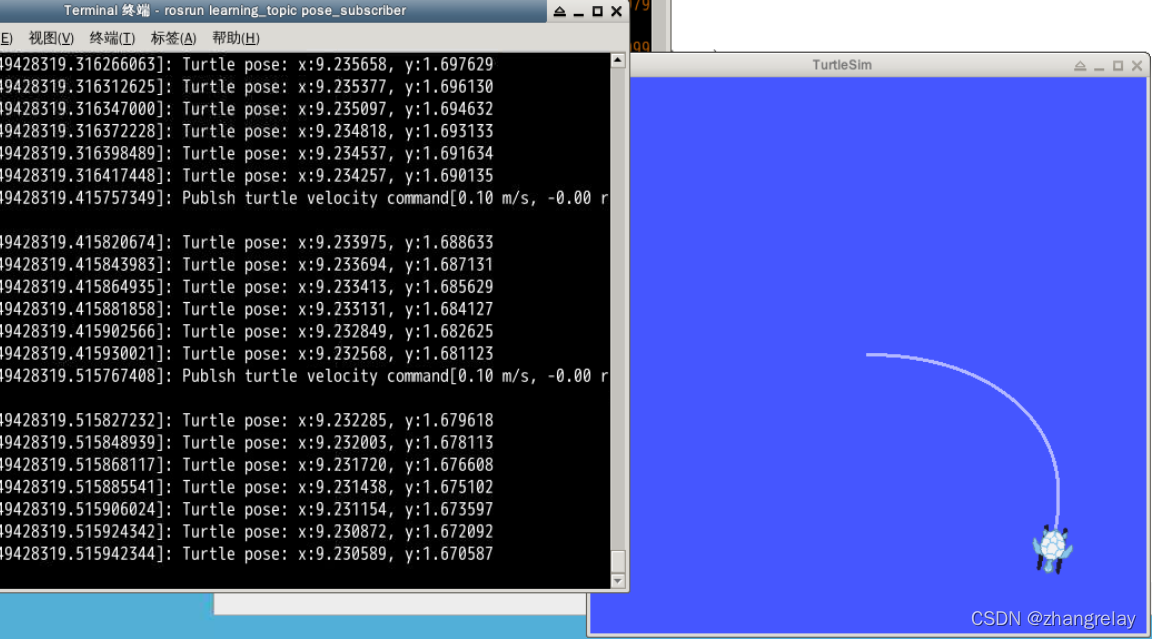
获取目标位置与当前位置之间的误差,用于机器人运动控制。
假定目标x=10.0 y=1.5,求解机器人控制速度?
获取位置:
#include <ros/ros.h>
#include "turtlesim/Pose.h"
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "pose_subscriber");
ros::NodeHandle n;
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
ros::spin();
return 0;
}发布速度:
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
ros::init(argc, argv, "velocity_publisher");
ros::NodeHandle n;
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
loop_rate.sleep();
}
return 0;
}暴力揉到一起…………………………不推荐……………………
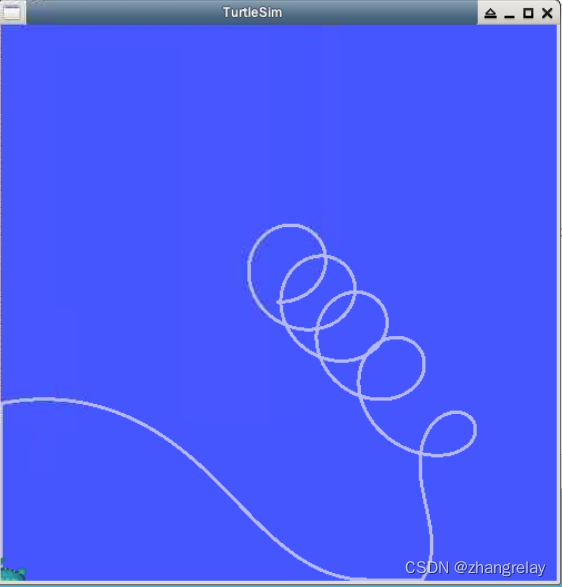
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include "turtlesim/Pose.h"
float goal_x=10.0,goal_y=1.5,vel_x=0,vel_z=0;
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
vel_x=(goal_x-msg->x)/8.0;
vel_z=(goal_y-msg->y)/40.0;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "pose_sub_vel_pub");
ros::NodeHandle n;
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
ros::Rate loop_rate(10);
int count = 0;
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.0;
vel_msg.angular.z = 0.0;
while (ros::ok())
{
vel_msg.linear.x=vel_x;
vel_msg.angular.z=vel_z;
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
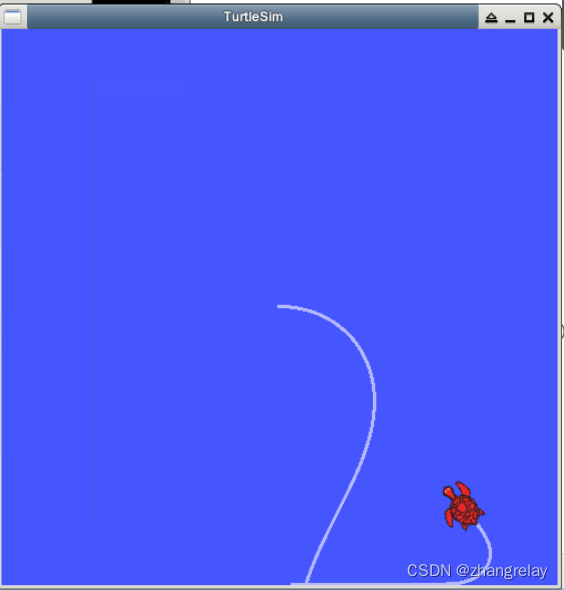
}更好用的代码需要自己研究哦 。


















 3956
3956

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











