



这是课程中的一个案例:
代码实现如下:
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
ros::init(argc, argv, "velocity_publisher");
ros::NodeHandle n;
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.1+0.0001*count;
vel_msg.angular.z = 0.2;
count++;
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
loop_rate.sleep();
}
return 0;
}
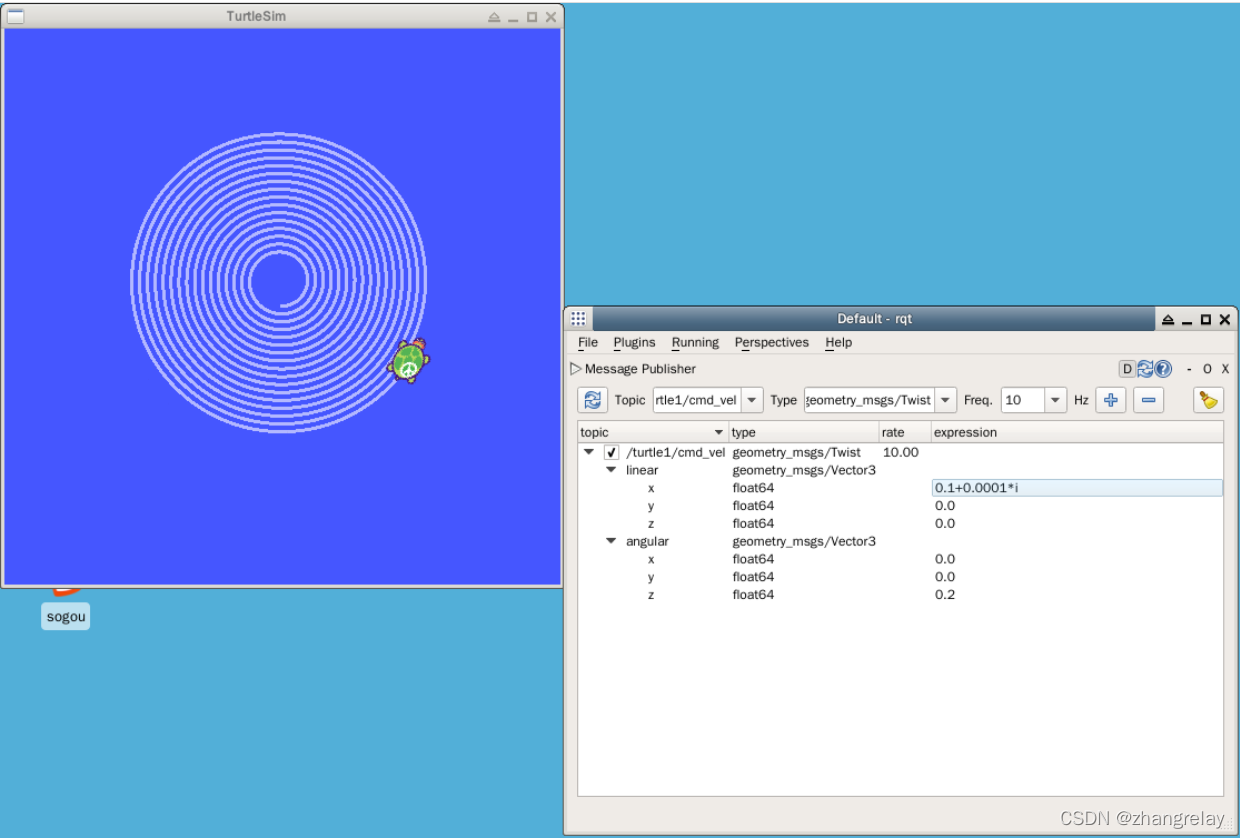
rqt等效:
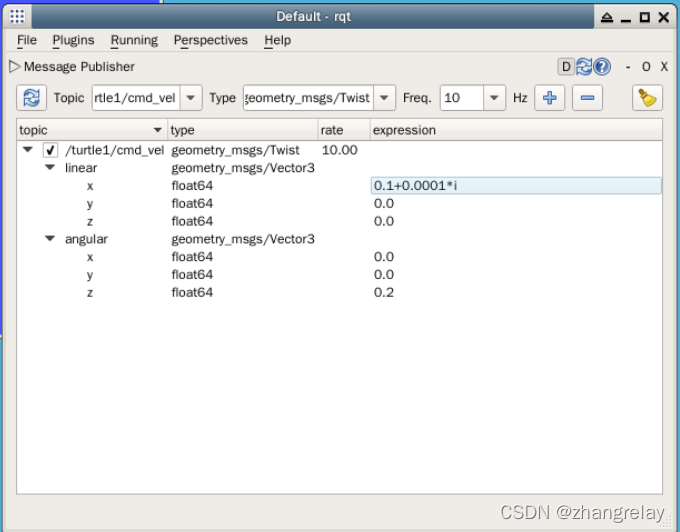
主要想说明简单案例调试时间成本差异。
实现同样的功能所花费的时间,效率提升非常明显
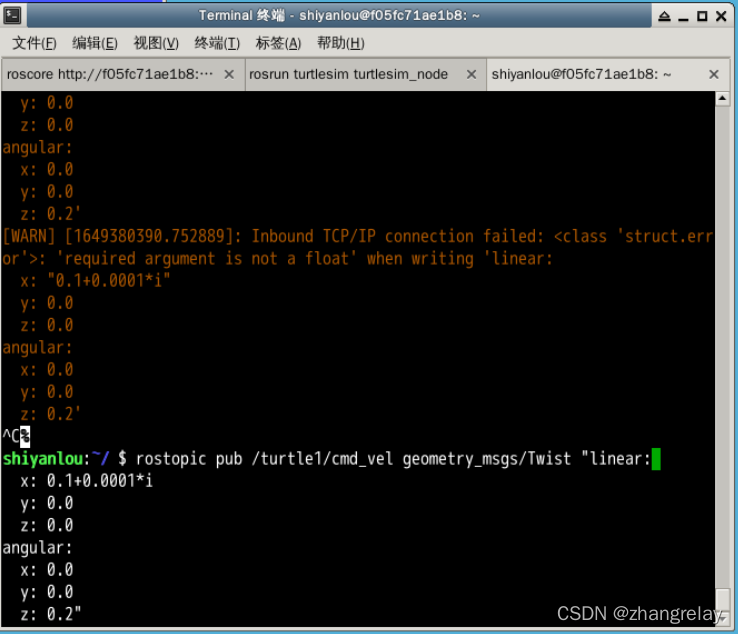
为什么报错?


















 973
973

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











