



 博主在Pop_OS 20.04上安装了与Ubuntu相同版本的ROS2 Foxy和Webots 2019a,过程中未遇到问题。系统壁纸具有B站风格。详细记录了从更新系统、添加源、安装软件到运行案例的全部指令,包括安装ros2、webots、相关扩展和依赖,并成功运行了几个ros2相关演示。
博主在Pop_OS 20.04上安装了与Ubuntu相同版本的ROS2 Foxy和Webots 2019a,过程中未遇到问题。系统壁纸具有B站风格。详细记录了从更新系统、添加源、安装软件到运行案例的全部指令,包括安装ros2、webots、相关扩展和依赖,并成功运行了几个ros2相关演示。
所使用的Pop_os版本与ubuntu一致为20.04,使用感受不如ubuntu,可能是个人习惯吧。
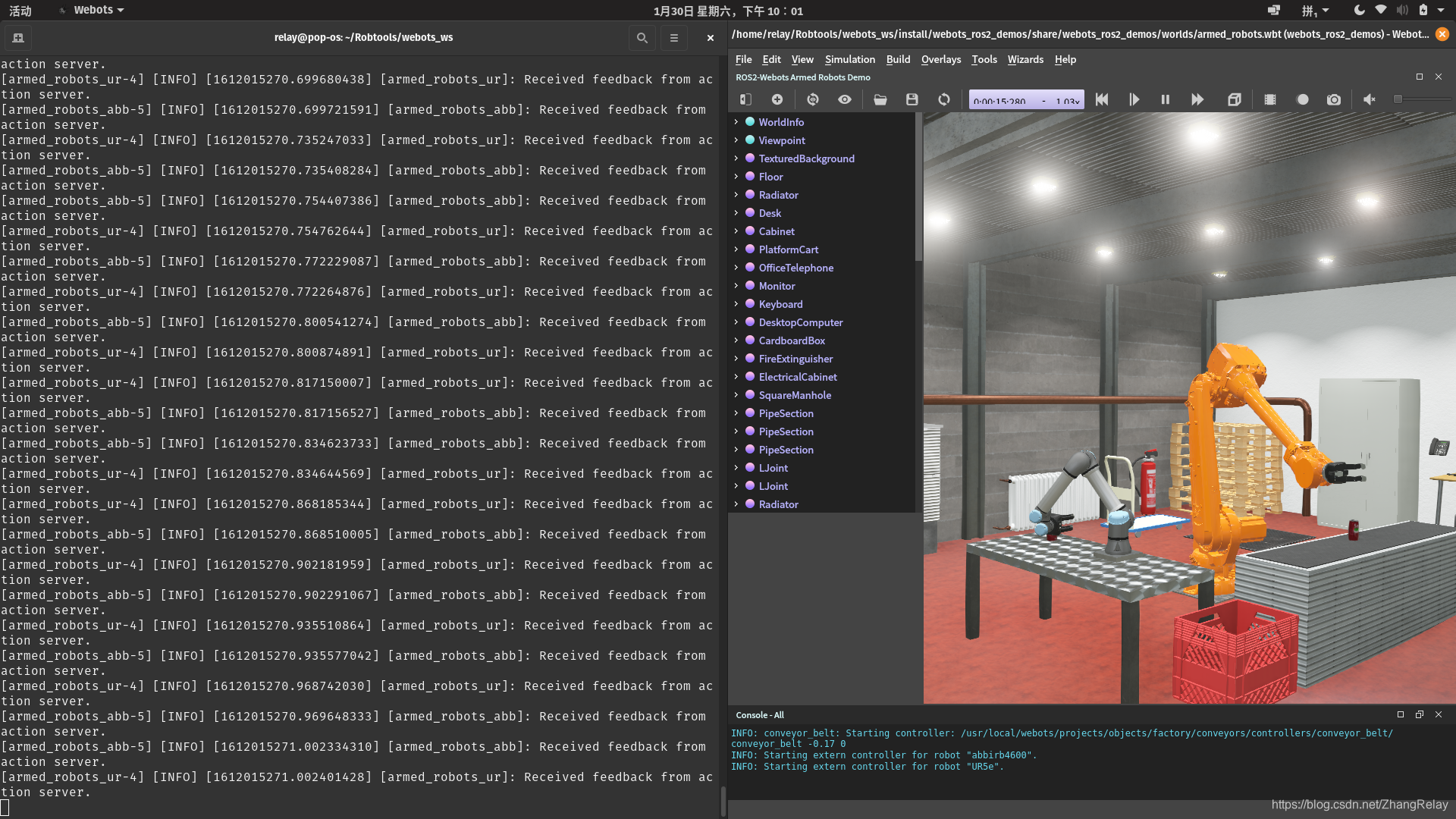
安装ros2和webots,没有遇到问题。
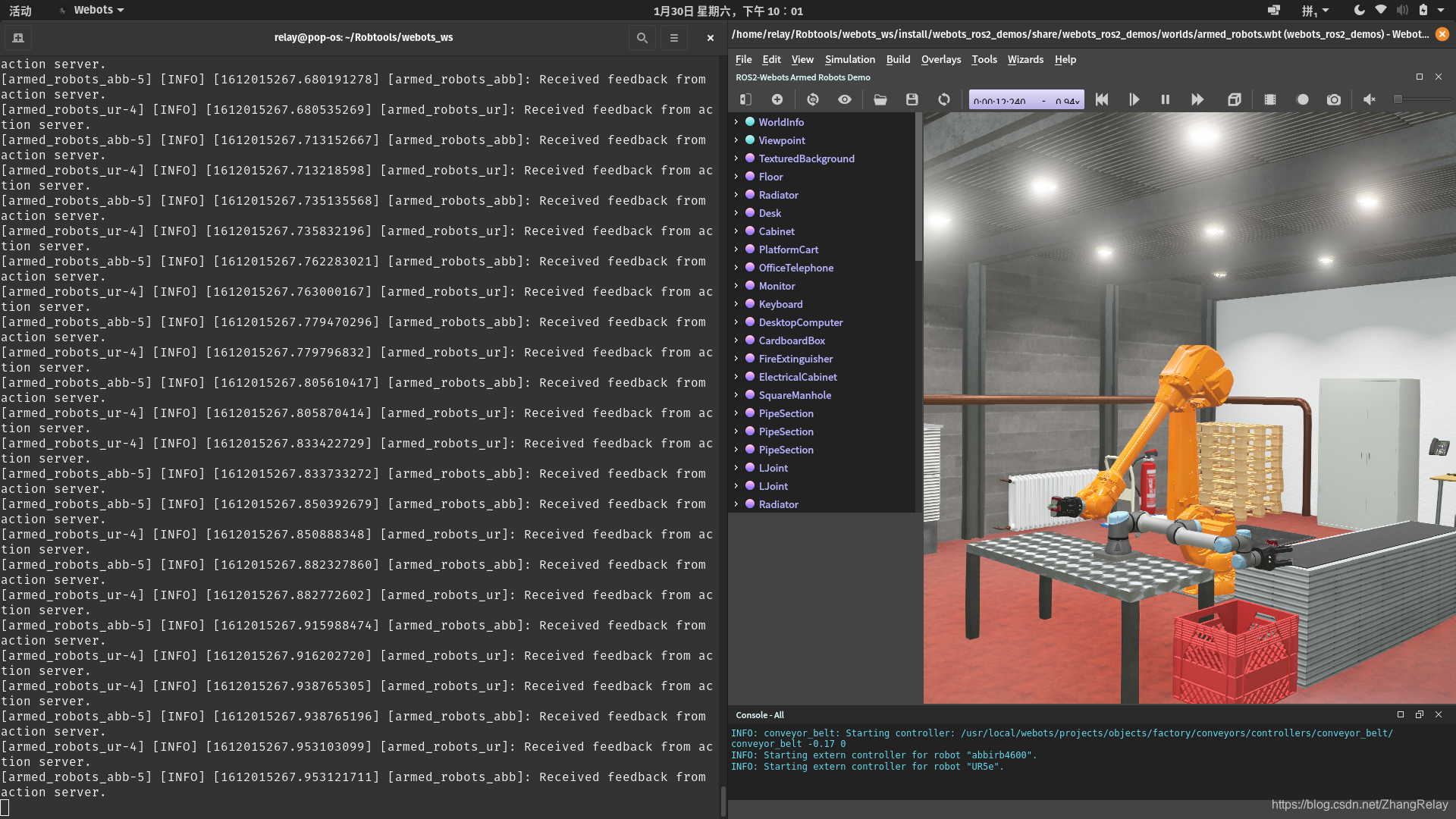
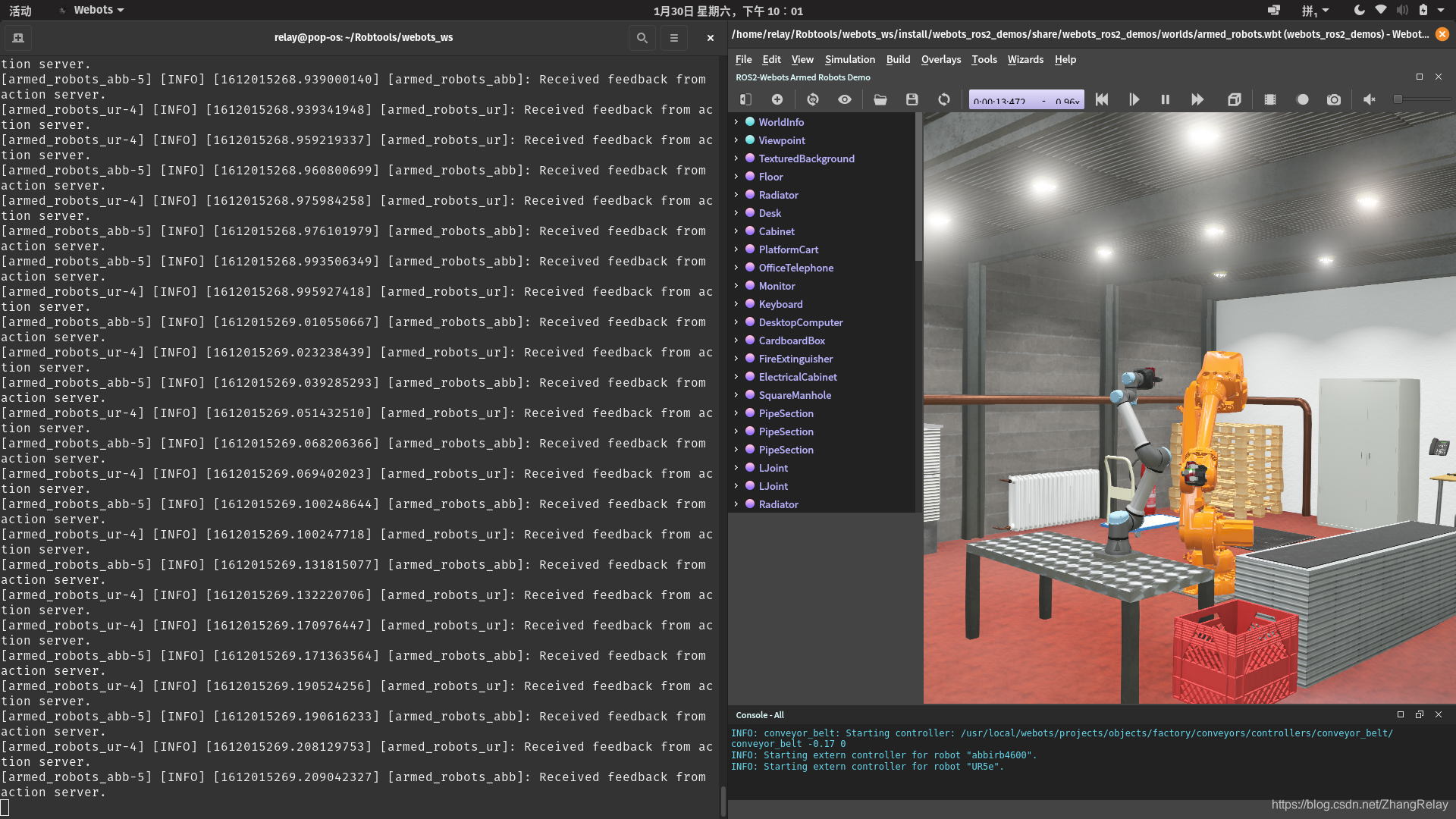
成功

失败

壁纸很有B站风格……
系统简要信息:

安装ros2-foxy和webots2019a。
案例使用参考博客webots+ros2笔记系列。
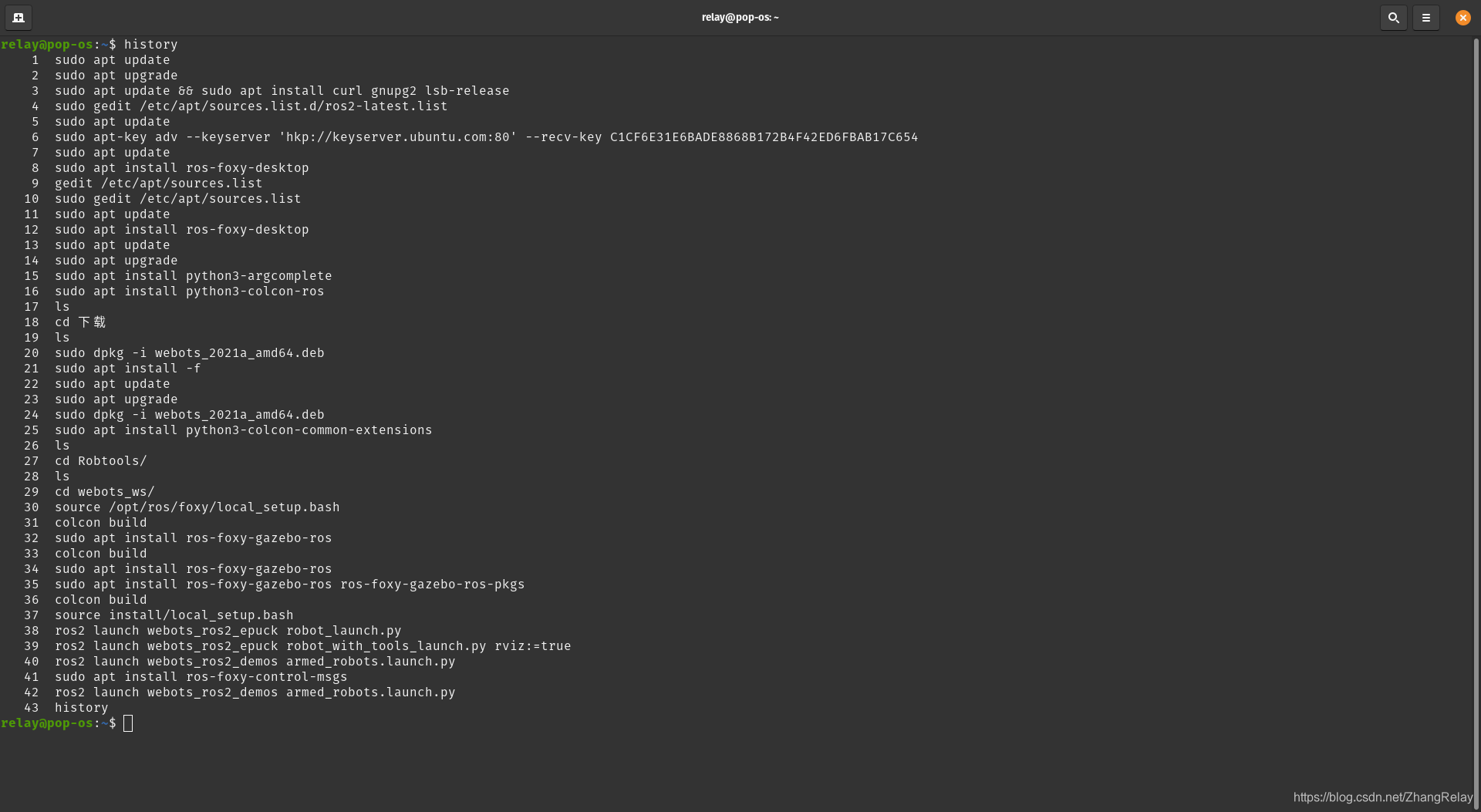
一共输入了如下指令(包括重复的):
1 sudo apt update
2 sudo apt upgrade
3 sudo apt update && sudo apt install curl gnupg2 lsb-release
4 sudo gedit /etc/apt/sources.list.d/ros2-latest.list
5 sudo apt update
6 sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
7 sudo apt update
8 sudo apt install ros-foxy-desktop
9 gedit /etc/apt/sources.list
10 sudo gedit /etc/apt/sources.list
11 sudo apt update
12 sudo apt install ros-foxy-desktop
13 sudo apt update
14 sudo apt upgrade
15 sudo apt install python3-argcomplete
16 sudo apt install python3-colcon-ros
17 ls
18 cd 下载
19 ls
20 sudo dpkg -i webots_2021a_amd64.deb
21 sudo apt install -f
22 sudo apt update
23 sudo apt upgrade
24 sudo dpkg -i webots_2021a_amd64.deb
25 sudo apt install python3-colcon-common-extensions
26 ls
27 cd Robtools/
28 ls
29 cd webots_ws/
30 source /opt/ros/foxy/local_setup.bash
31 colcon build
32 sudo apt install ros-foxy-gazebo-ros
33 colcon build
34 sudo apt install ros-foxy-gazebo-ros
35 sudo apt install ros-foxy-gazebo-ros ros-foxy-gazebo-ros-pkgs
36 colcon build
37 source install/local_setup.bash
38 ros2 launch webots_ros2_epuck robot_launch.py
39 ros2 launch webots_ros2_epuck robot_with_tools_launch.py rviz:=true
40 ros2 launch webots_ros2_demos armed_robots.launch.py
41 sudo apt install ros-foxy-control-msgs
42 ros2 launch webots_ros2_demos armed_robots.launch.py
43 history



















 5295
5295




 到【灌水乐园】发言
到【灌水乐园】发言









